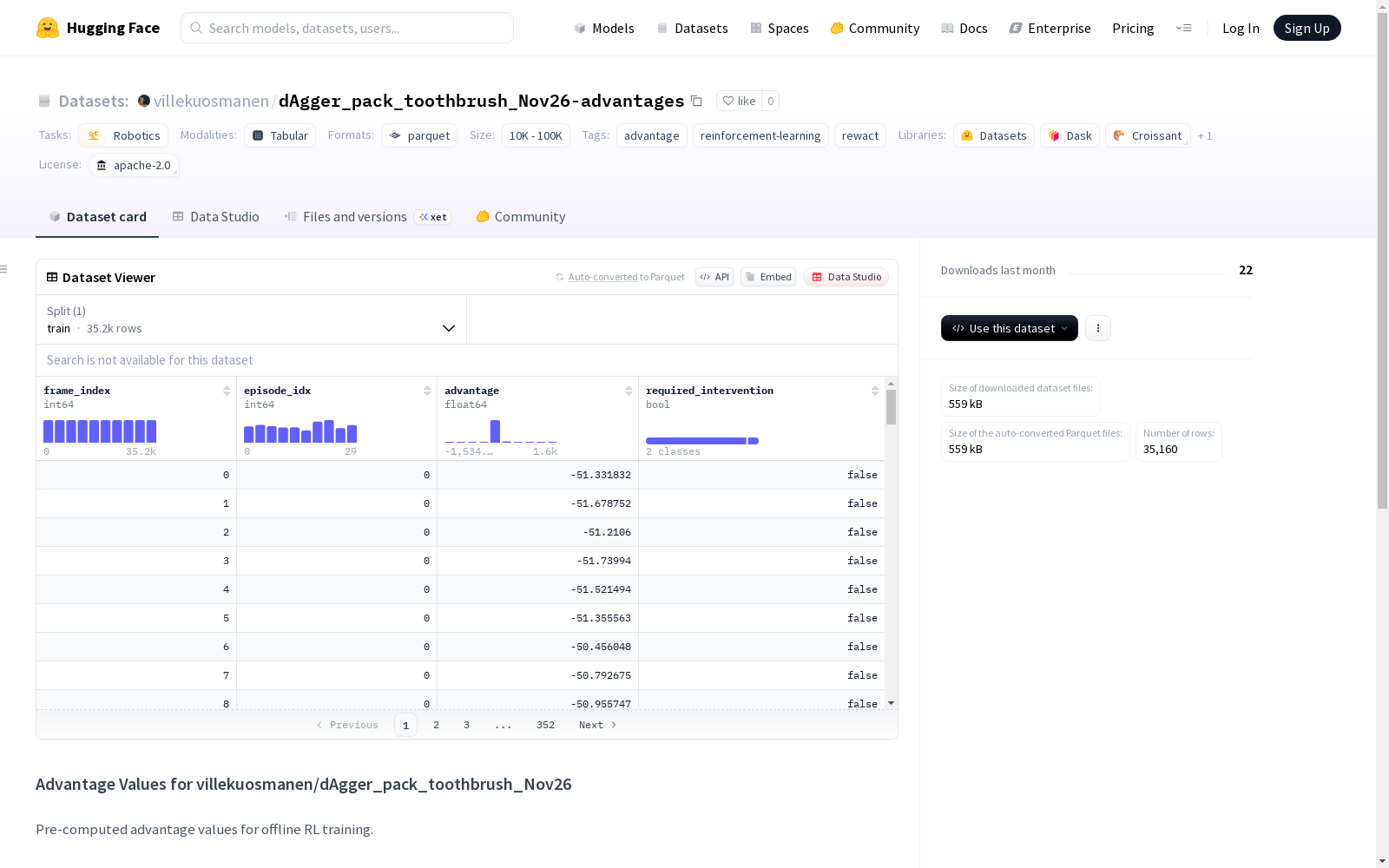
dAgger_pack_toothbrush_Nov26-advantages
收藏Hugging Face2025-12-01 更新2025-12-02 收录
下载链接:
https://huggingface.co/datasets/villekuosmanen/dAgger_pack_toothbrush_Nov26-advantages
下载链接
链接失效反馈官方服务:
资源简介:
这是一个用于离线强化学习训练的预计算优势值数据集,来源于 villekuosmanen/dAgger_pack_toothbrush_Nov26,使用villekuosmanen/rewact_toothbrush_pistar_1.4.0模型进行50步向前查看的价值估计。
创建时间:
2025-11-28
原始信息汇总
数据集概述
基本描述
- 数据集名称: Advantage Values for villekuosmanen/dAgger_pack_toothbrush_Nov26
- 核心功能: 提供用于离线强化学习训练、预计算的优势值。
- 许可证: Apache-2.0
- 任务类别: 机器人学
- 标签: 优势值、强化学习、rewact
数据来源与计算
- 源数据集: villekuosmanen/dAgger_pack_toothbrush_Nov26
- 价值模型: villekuosmanen/rewact_toothbrush_pistar_1.4.0
- 计算参数: N步前瞻步数为50
数据内容与格式
- 内容: 包含每个帧的优势值。
- 文件格式: 每个episode存储为独立的parquet文件。
使用方法
python from pathlib import Path import pandas as pd
加载特定episode的优势值
advantage_df = pd.read_parquet("episode_00000.parquet")
搜集汇总
数据集介绍
构建方式
在机器人强化学习领域,离线数据集的构建对于算法训练至关重要。本数据集基于原始数据集villekuosmanen/dAgger_pack_toothbrush_Nov26,通过预训练的价值模型villekuosmanen/rewact_toothbrush_pistar_1.4.0进行优势值计算,采用50步前瞻策略,为每一帧动作生成对应的优势估计,并以分集Parquet文件格式存储,确保了数据的结构化和高效访问。
特点
该数据集的核心特点在于其专注于优势值的预计算,为离线强化学习提供了即用的训练信号。优势值反映了动作相对于平均表现的优劣,能够有效指导策略优化。数据集以分集文件组织,便于按需加载特定轨迹,同时基于成熟的价值模型和前瞻计算,确保了估计值的准确性和一致性,适用于机器人操作任务中的策略评估与改进。
使用方法
使用本数据集时,研究人员可通过Python环境轻松加载优势数据。利用pandas库的read_parquet函数,直接读取指定episode文件即可获取包含帧级优势值的数据框。这种设计简化了数据预处理流程,支持快速集成到离线强化学习训练管道中,例如结合行为克隆或优势加权算法,以提升机器人打包牙刷等精细操作任务的策略性能。
背景与挑战
背景概述
在机器人学与强化学习领域,离线强化学习(Offline RL)作为一种无需与环境实时交互的数据驱动范式,近年来受到广泛关注。dAgger_pack_toothbrush_Nov26数据集由研究人员villekuosmanen于2023年11月构建,专注于牙刷打包任务,旨在通过模仿学习与数据聚合策略收集演示轨迹。其核心研究问题在于如何从静态数据集中学习稳健策略,以克服在线交互的高成本与安全风险,为机器人操作任务提供了宝贵的基准资源,推动了离线强化学习在现实场景中的应用探索。
当前挑战
该数据集所解决的领域问题聚焦于机器人操作中的牙刷打包任务,其挑战在于处理高维视觉与动作空间、应对物体形变与姿态变化带来的动态不确定性,以及实现精确的抓取与放置操作。在构建过程中,挑战主要源于数据收集的复杂性:需要协调模仿学习与数据聚合算法以生成高质量轨迹,同时确保动作序列的连续性与任务成功率;此外,数据标注与优势值计算依赖于预训练的价值模型,模型偏差可能影响离线策略学习的泛化性能。
常用场景
经典使用场景
在机器人学与强化学习领域,离线强化学习(Offline RL)旨在从静态数据集中学习策略,而无需与环境实时交互。dAgger_pack_toothbrush_Nov26-advantages数据集通过提供预计算的优势值(advantage values),为这一过程提供了关键支持。其经典使用场景涉及利用这些优势值进行策略评估与优化,例如在模仿学习或基于值的算法中,研究者可以直接加载优势数据,加速训练流程,避免重复计算,从而专注于策略改进与泛化能力的探索。
解决学术问题
该数据集解决了离线强化学习中常见的样本效率与价值估计难题。在机器人操作任务如牙刷打包中,直接从原始数据学习策略往往面临高方差与收敛缓慢的挑战。通过预计算的优势值,研究者能够更准确地评估动作的长期收益,减少价值函数的估计偏差,从而提升策略学习的稳定性和性能。这不仅促进了离线RL算法在复杂环境中的适用性,还为处理稀疏奖励或高维状态空间提供了实用解决方案。
衍生相关工作
该数据集衍生了多项经典研究工作,特别是在离线强化学习与机器人控制交叉领域。基于预计算优势值的框架,研究者开发了改进的算法如Advantage-Weighted Actor-Critic(AWAC)及其变体,用于处理静态数据集中的分布偏移问题。此外,结合模仿学习技术,这些工作推动了行为克隆与强化学习的融合,在机器人操作任务中实现了更高的样本复用率和策略性能,为后续数据集如D4RL或Robomimic的扩展提供了方法论参考。
以上内容由遇见数据集搜集并总结生成


