Paris-CARLA-3D
收藏arXiv2021-11-23 更新2024-06-21 收录
下载链接:
https://npm3d.fr/paris-carla-3d
下载链接
链接失效反馈官方服务:
资源简介:
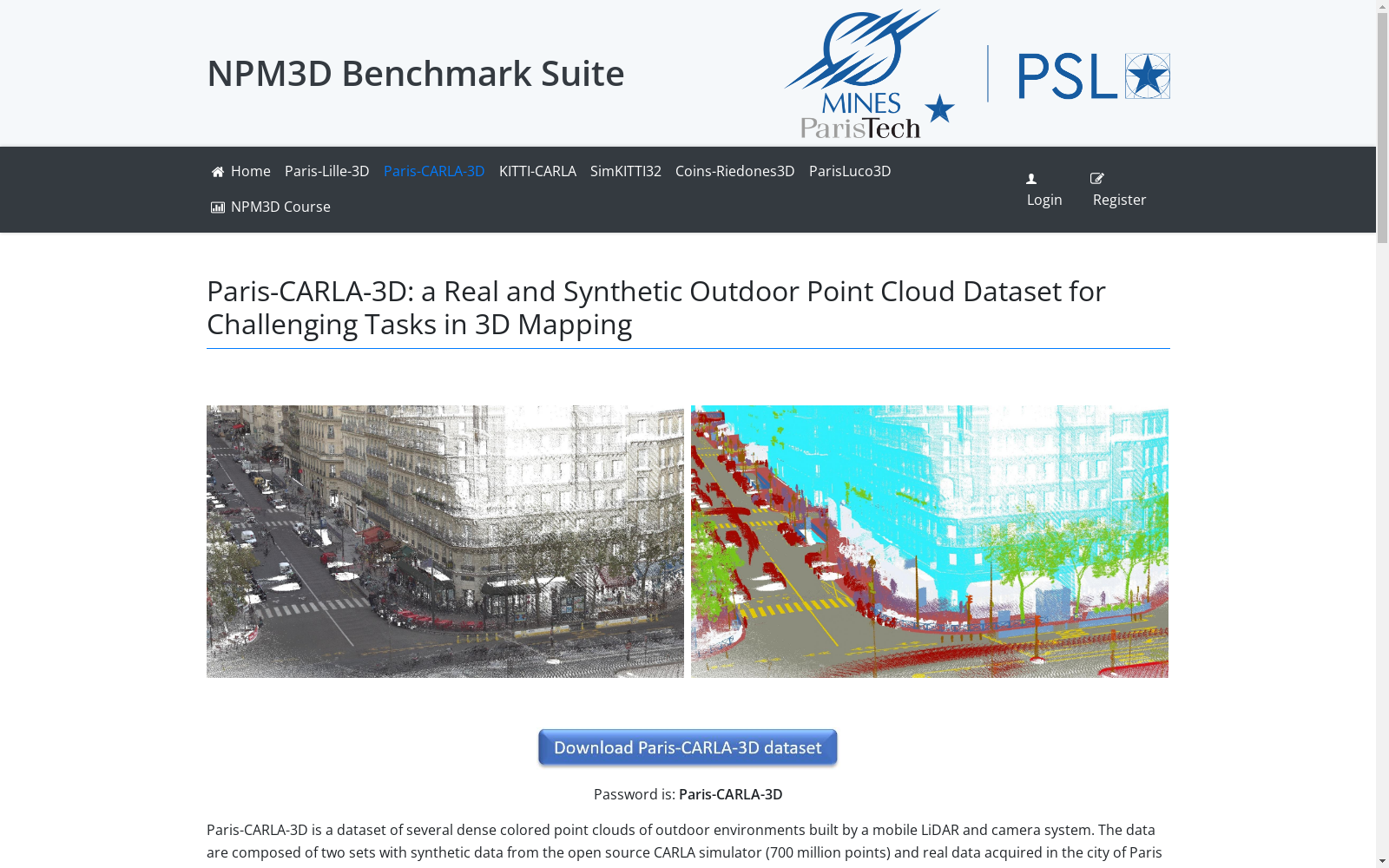
Paris-CARLA-3D数据集由MINES ParisTech, PSL University的机器人中心创建,包含7亿个密集彩色点云,分为合成数据(7亿点)和真实数据(6千万点)两部分。数据集通过移动激光雷达和相机系统获取,旨在评估和改进户外环境3D地图中的语义分割、实例分割和场景完成等任务。数据集的独特之处在于,合成数据与真实数据使用相同的激光雷达和相机平台,并进行了手动标注,以便测试从合成到真实数据的转移方法。
The Paris-CARLA-3D dataset was created by the Robotics Center of MINES ParisTech, PSL University. It consists of 700 million dense colored point clouds, split into two subsets: synthetic data (700 million points) and real-world data (60 million points). The dataset is acquired using a mobile LiDAR and camera system, and is designed to evaluate and improve tasks such as semantic segmentation, instance segmentation and scene completion in 3D maps of outdoor environments. The distinctive feature of this dataset is that both the synthetic and real-world data were collected with the same LiDAR and camera platform, and are manually annotated, enabling the testing of transfer learning methods from synthetic to real-world data.
提供机构:
MINES ParisTech, PSL University, Centre for robotics
创建时间:
2021-11-23
搜集汇总
数据集介绍
构建方式
Paris-CARLA-3D数据集通过结合真实和合成数据构建,旨在为户外环境的3D映射任务提供挑战性数据。真实数据部分由配备LiDAR(Velodyne HDL32)和360°相机(Ladybug5)的移动系统在巴黎采集,生成6000万个点云。合成数据部分则通过开源的CARLA模拟器生成,包含7亿个点云。数据集的构建过程中,使用了精确的SLAM算法(IMLS-SLAM)来聚合LiDAR扫描,并确保了真实与合成数据在传感器平台和数据标注上的一致性。
使用方法
Paris-CARLA-3D数据集可用于多种3D视觉任务的评估和算法开发,包括语义分割、实例分割和场景补全。研究者可以通过数据集提供的训练、验证和测试集进行模型训练和评估。数据集的点云数据以二进制PLY格式存储,每个点包含丰富的属性信息,如位置、强度、颜色和语义标签等。通过使用深度学习模型(如PointNet++和KPConv),研究者可以针对不同任务进行实验,并利用合成数据进行预训练,以提升模型在真实数据上的表现。
背景与挑战
背景概述
Paris-CARLA-3D数据集由MINES ParisTech和PSL大学的研究人员于2021年创建,旨在为户外环境的3D点云数据提供一个具有挑战性的基准。该数据集结合了真实数据(6000万点)和合成数据(7亿点),分别采集自巴黎市区的移动LiDAR系统以及开源的CARLA模拟器。其核心研究问题集中在户外环境的语义分割、实例分割和场景补全等任务上。通过模拟与真实数据的结合,该数据集为从合成数据到真实数据的迁移学习提供了独特的实验平台,推动了3D点云分析技术在城市建模、自动驾驶等领域的应用。
当前挑战
Paris-CARLA-3D数据集面临的主要挑战包括:1) 真实数据中由于传感器噪声和移动系统带来的数据不均匀性和局部各向异性;2) 合成数据与真实数据之间的域差异,导致从合成数据到真实数据的迁移学习效果有限;3) 户外环境中由于遮挡和稀疏性导致的点云数据缺失问题,特别是在场景补全任务中;4) 数据标注的高复杂性,尤其是手动标注真实数据中的语义和实例信息,耗费了大量的人力和时间。此外,如何在保持高精度定位的同时,处理大规模点云数据的存储和计算也是该数据集面临的技术难题。
常用场景
经典使用场景
Paris-CARLA-3D数据集的经典使用场景主要集中在户外环境的3D语义分割、实例分割和场景补全任务上。该数据集通过结合真实数据和合成数据,提供了丰富的点云数据,特别适用于评估和改进在复杂户外场景中的3D视觉任务。例如,研究人员可以利用该数据集进行语义分割,以识别和分类点云中的不同对象类别;实例分割则用于区分同一类别中的不同实例,如车辆或行人;场景补全任务则旨在填补由于遮挡或传感器限制而缺失的点云部分。
解决学术问题
Paris-CARLA-3D数据集解决了户外3D点云数据分析中的多个学术问题。首先,它填补了户外点云数据集的空白,提供了真实和合成数据的结合,使得研究人员能够在不同环境下验证算法的鲁棒性。其次,该数据集通过手动标注和模拟器自动标注,提供了高质量的语义和实例标签,解决了点云数据标注困难的问题。此外,数据集还支持场景补全任务,帮助研究人员解决由于遮挡或传感器限制导致的点云缺失问题,推动了3D地图构建和自动驾驶等领域的发展。
实际应用
Paris-CARLA-3D数据集在实际应用中具有广泛的应用场景。首先,它在城市地图构建中发挥了重要作用,能够帮助城市管理者更好地理解和分析城市环境,优化基础设施管理。其次,该数据集在自动驾驶领域具有重要意义,特别是在高精度地图的构建和更新中,能够提供准确的语义信息和实例分割结果,帮助车辆识别和规避障碍物。此外,场景补全任务的应用可以提高点云数据的完整性,进一步增强自动驾驶系统的安全性。
数据集最近研究
最新研究方向
Paris-CARLA-3D数据集在3D点云处理领域中引入了合成与真实数据的结合,为户外环境的三维建模提供了新的研究方向。该数据集不仅包含了通过移动LiDAR系统采集的巴黎真实点云数据,还通过CARLA模拟器生成了大规模的合成点云数据,使得研究者能够在相同的传感器平台上进行合成与真实数据的对比研究。这一特性为语义分割、实例分割和场景补全等复杂任务提供了独特的实验平台。特别是,该数据集支持从合成数据到真实数据的迁移学习,探索了如何利用合成数据提升真实场景中的算法性能,这一研究方向在自动驾驶和城市建模等领域具有重要的应用前景。
相关研究论文
- 1Paris-CARLA-3D: A Real and Synthetic Outdoor Point Cloud Dataset for Challenging Tasks in 3D MappingMINES ParisTech, PSL University, Centre for robotics · 2021年
以上内容由遇见数据集搜集并总结生成


