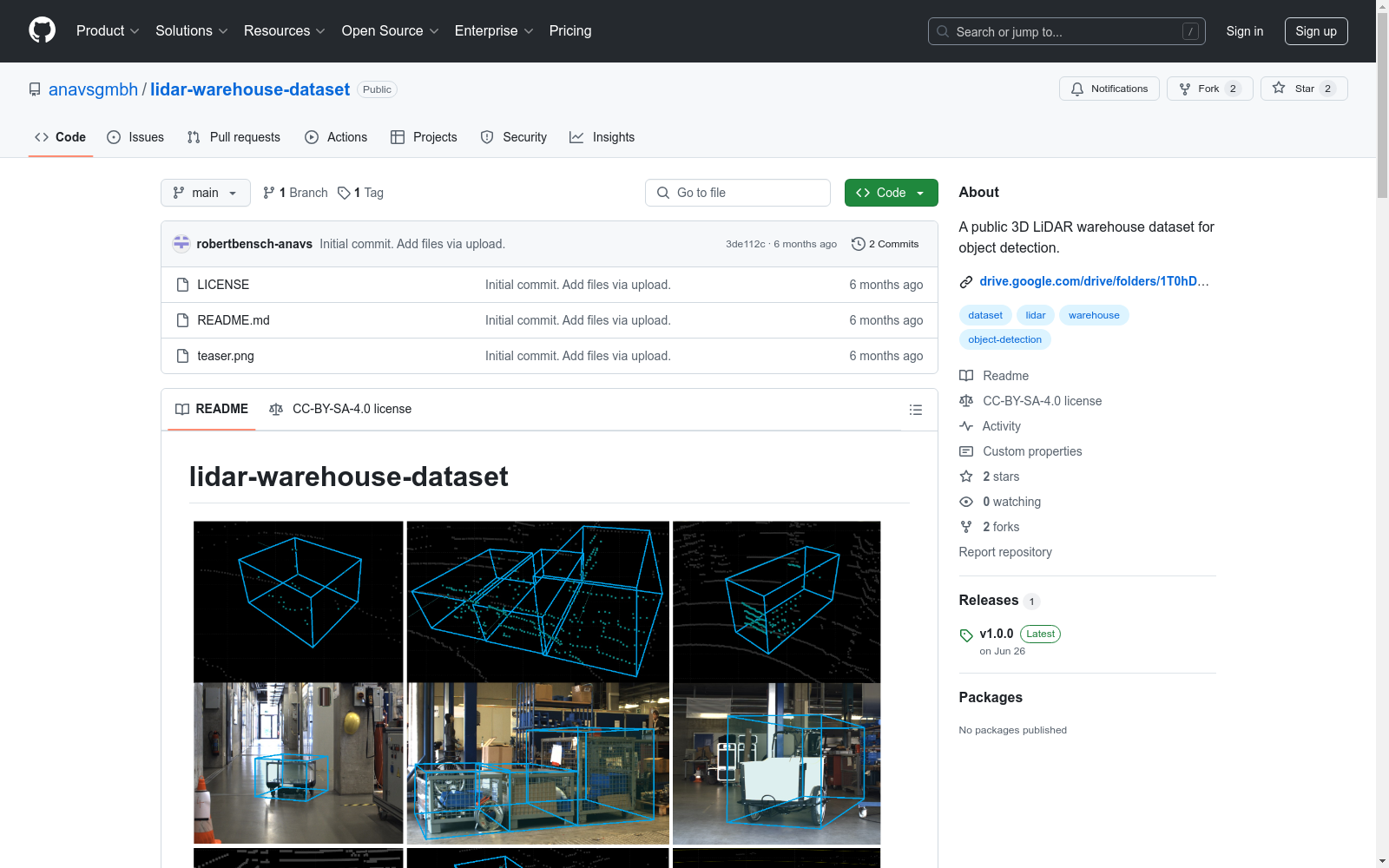
lidar-warehouse-dataset
收藏数据集概述
本数据集是为仓库环境中的3D物体检测提供的LiDAR数据集,由Gina Abdelhalim、Kevin Simon、Robert Bensch、Sai Parimi和Bilal Ahmed Qureshi等人创建,隶属于Karlsruher Institut für Technologie (KIT)和ANavS GmbH。该数据集是首个针对工业仓库环境的开放源代码3D点云数据集。
数据集描述
数据集包含来自仓库环境的连续3D LiDAR扫描(Velodyne Puck/ VLP-16),由移动平台上的记录创建。数据集包含以下五类物体的3D边界框标注:
| 数据类型 | 标签 | 颜色 | 样本数量 |
|---|---|---|---|
| 3D点云数据 | - | - | 3287 |
| 标注(3D边界框) | |||
| - 车辆平台(类型1) | "FTS" | 绿色 | 600 |
| - 车辆平台(类型2) | "ELFplusplus" | 橙色 | 1248 |
| - 车辆平台(类型3) | "CargoBike" | 粉色 | 1205 |
| - 金属箱 | "Box" | 蓝色 | 2847 |
| - 叉车 | "ForkLift" | 红色 | 481 |
当前版本不包括人员标注。
数据结构
数据集的组织结构如下:
DATASET ├── bin ├── 000000.bin ├── 000001.bin ├── 000002.bin ├── .... ├── label ├── 000000.txt ├── 000001.txt ├── 000002.txt ├── .... ├── tools ├── get_dataset_stats.sh ├── vis ├── 000000.png ├── 000001.png ├── 000002.png ├── .... ├── dense_point_cloud_SLAM.png ├── LICENSE ├── README.md ├── teaser.png
其中:
- bin/:包含原始3D点云数据的二进制文件(
.bin) - label/:包含每个扫描的标注文件(
.txt) - tools/:包含数据集工具(例如运行
./tools/get_dataset_stats.sh) - vis/:包含每个LiDAR扫描的顶视图和透视图的视觉化图表,包括边界框
- dense_point_cloud_SLAM.png:用于3D边界框标注的场景密集3D点云的渲染图
- LICENSE:提供数据集许可证信息
- README.md:提供数据集描述
- teaser.png:来自论文的预告图像
标注文件格式
txt标注文件包含扫描中所有物体的边界框参数。每行包含单个边界框的参数,格式如下:
class_name position_x_m position_y_m position_z_m scale_x_m scale_y_m scale_z_m yaw_angle_rad
应用
该数据集可用于基于16通道3D LiDAR数据的仓库环境中3D物体检测的研究和开发,包括但不限于:
- 工业环境中的自动驾驶车辆导航
- 物体检测和分类
- 机器人和自动化
- 工业检查和监控
引用
如果使用此数据集,请引用相应的论文:
@Article{Abdelhalim2024, author = {G. Abdelhalim and K. Simon and R. Bensch and S. Parimi and B. A. Qureshi}, title = {Automated AI-based Annotation Framework for 3D Object Detection from LIDAR Data in Industrial Areas}, journal = {Society of Automotive Engineers (SAE) Technical Paper}, year = {2024}, volume = {2024-01-2999}, issn = {2688-3627}, url = {https://www.sae.org/publications/technical-papers/content/2024-01-2999/}, }
许可证
该数据集根据CC-BY-SA-4.0许可证发布。详细信息请参见LICENSE文件。