SoftGym
收藏arXiv2021-03-08 更新2024-06-21 收录
下载链接:
https://sites.google.com/view/softgym
下载链接
链接失效反馈官方服务:
资源简介:
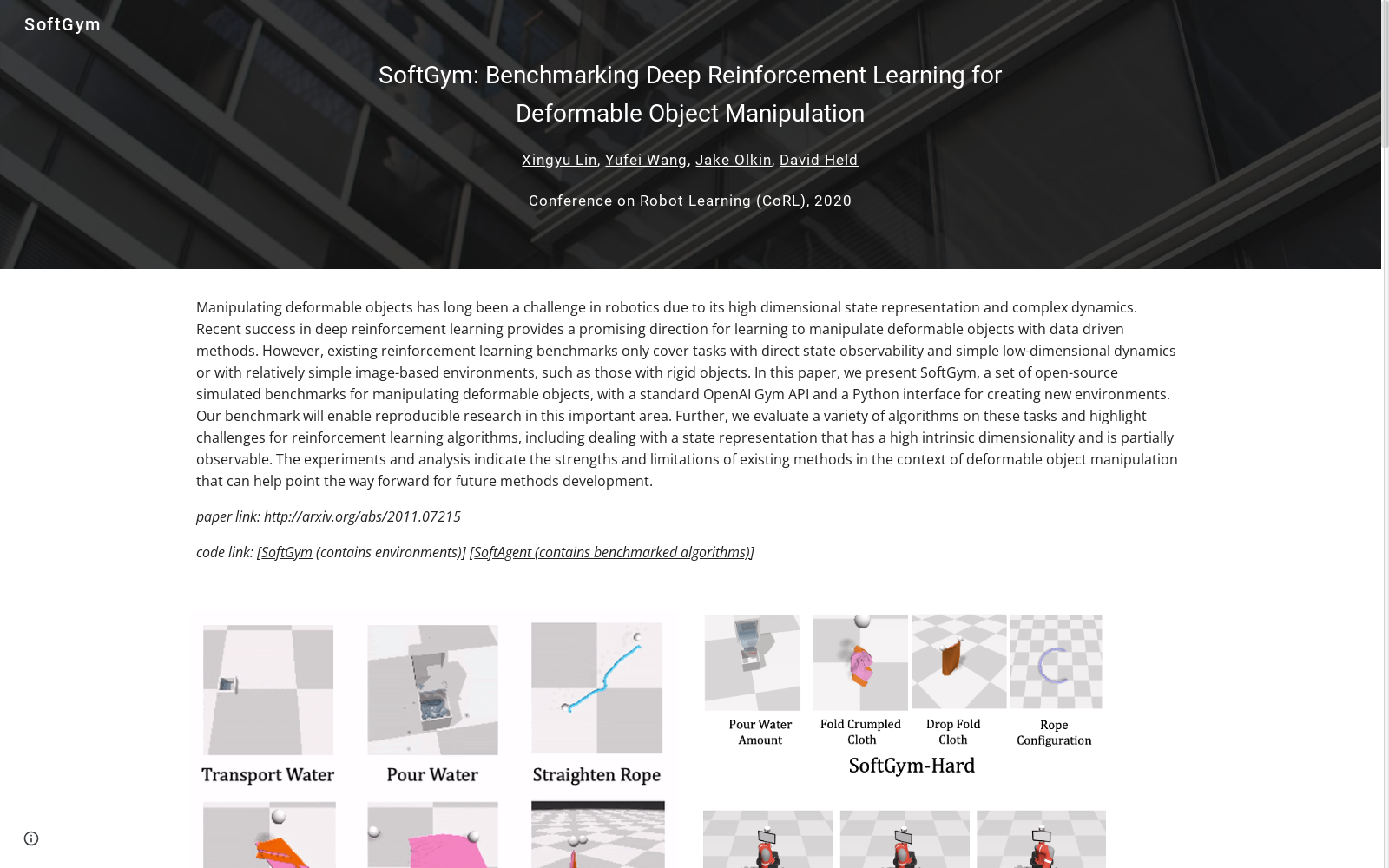
SoftGym是由卡内基梅隆大学创建的一套开源模拟基准数据集,专注于可变形物体操作,包含10个涉及绳索、布料和可变属性流体的挑战性环境。数据集通过标准的OpenAI Gym API和Python接口创建新环境,旨在通过提供标准化的环境集,促进可变形物体操作领域的新算法开发和比较。SoftGym的应用领域广泛,包括日常生活中的衣物折叠、食品制作以及工业应用中的包装或处理电缆等,旨在解决机器人操作可变形物体的高维状态表示和复杂动力学问题。
SoftGym is an open-source simulated benchmark dataset developed by Carnegie Mellon University, focusing on deformable object manipulation. It includes 10 challenging environments involving ropes, fabrics, and fluids with variable physical properties. The benchmark supports creating new environments via the standard OpenAI Gym API and Python interface, aiming to facilitate the development and comparison of novel algorithms in the field of deformable object manipulation by providing a standardized set of environments. SoftGym has broad application scenarios, including daily tasks such as cloth folding and food preparation, as well as industrial applications like packaging or cable handling. It aims to address the challenges of high-dimensional state representation and complex dynamics in robotic manipulation of deformable objects.
提供机构:
卡内基梅隆大学
创建时间:
2020-11-14
搜集汇总
数据集介绍
构建方式
SoftGym数据集通过构建一系列开放源代码的模拟基准环境,专门用于可变形物体操作的深度强化学习研究。该数据集基于Nvidia FleX物理模拟器,包含10个具有挑战性的环境,涉及绳索、布料和流体的操作,具有不同的状态和动作空间选项。这些环境通过标准的OpenAI Gym API和Python接口进行创建,旨在为可变形物体操作提供可复现的研究平台。
特点
SoftGym数据集的特点在于其复杂的高维状态表示和部分可观测性,这使得机器人操作任务变得极具挑战性。数据集中的环境涵盖了多种可变形物体的操作任务,如绳索拉直、布料展开和折叠、流体倾倒等,每个任务的状态空间维度从数百到数千不等。此外,SoftGym提供了多种观察空间选项,包括完整状态、简化状态和视觉观察,以评估不同算法在不同条件下的表现。
使用方法
SoftGym数据集的使用方法包括通过标准的OpenAI Gym API和Python接口加载和创建环境。用户可以选择不同的观察空间(如完整状态、简化状态或视觉观察)来训练和评估强化学习算法。数据集提供了多种算法基准,包括基于动态模型的优化方法、基于状态的强化学习方法以及基于图像的强化学习方法。用户可以通过这些基准来开发和比较新的算法,从而推动可变形物体操作领域的发展。
背景与挑战
背景概述
SoftGym数据集由卡内基梅隆大学的Xingyu Lin、Yufei Wang、Jake Olkin和David Held等人于2020年提出,旨在为可变形物体操作的深度强化学习提供一个开放的模拟基准。该数据集的核心研究问题是如何通过数据驱动的方法,利用深度强化学习技术来处理具有高维状态表示和复杂动力学的可变形物体操作任务。SoftGym通过提供一系列涉及绳索、布料和流体等可变形物体的操作环境,填补了现有强化学习基准中缺乏可变形物体操作任务的空白。该数据集的推出为相关领域的研究提供了可重复性和公平比较的基础,推动了机器人技术在日常生活中的应用,如折叠衣物和制作食物,以及工业应用中的包装和电缆处理等。
当前挑战
SoftGym数据集面临的挑战主要集中在两个方面。首先,可变形物体的操作任务具有高维状态表示和复杂的动力学特性,这使得现有的强化学习算法在处理这些任务时面临巨大的困难。其次,构建SoftGym数据集的过程中,研究人员需要克服模拟环境中部分可观测性和高维状态表示的问题,尤其是在仅依赖视觉观察的情况下,算法的性能显著下降。此外,从模拟环境到真实世界的迁移也是一个重要的挑战,尽管模拟环境能够反映真实世界的复杂动力学,但直接将模拟中学习到的策略迁移到真实机器人上仍然存在困难。这些挑战为未来的算法开发指明了方向,尤其是在图像观察和复杂动力学建模方面。
常用场景
经典使用场景
SoftGym 数据集的经典使用场景主要集中在深度强化学习(Deep Reinforcement Learning, DRL)领域,特别是在可变形物体操控任务中。该数据集提供了多种模拟环境,包括绳索、布料和流体的操控任务,如折叠布料、拉直绳索和倒水等。这些任务通过标准的 OpenAI Gym API 和 Python 接口实现,使得研究人员能够轻松创建新的环境并进行算法测试。SoftGym 的典型应用场景包括评估不同强化学习算法在处理高维状态表示和部分可观测性问题时的性能,尤其是在视觉观察为基础的操控任务中。
解决学术问题
SoftGym 数据集解决了机器人领域中长期存在的可变形物体操控难题,尤其是高维状态表示和复杂动力学问题。传统的强化学习基准通常仅适用于刚性物体或低维状态表示的任务,而 SoftGym 通过提供一系列包含复杂视觉观察和高维状态表示的模拟环境,填补了这一空白。该数据集的引入为研究人员提供了一个标准化的平台,用于开发和比较新的算法,特别是在处理部分可观测性和高维状态空间时。这不仅有助于推动强化学习算法的发展,还为未来的机器人操控技术提供了重要的研究方向。
衍生相关工作
SoftGym 数据集的发布催生了一系列相关的经典工作,特别是在可变形物体操控和深度强化学习领域。许多研究者基于 SoftGym 提供的模拟环境,开发了新的算法和模型,以应对高维状态表示和部分可观测性问题。例如,一些研究通过图像增强技术改进了基于视觉的强化学习算法,而另一些研究则探索了图神经网络(Graph Neural Networks, GNNs)在处理可变形物体时的应用。此外,SoftGym 还促进了模拟到现实(sim-to-real)的策略迁移研究,推动了模拟环境中训练的策略在真实机器人上的应用。这些衍生工作不仅丰富了可变形物体操控的研究,还为机器人技术的实际应用提供了新的思路。
以上内容由遇见数据集搜集并总结生成


