commaai/commaSteeringControl
收藏Hugging Face2024-04-05 更新2024-03-04 收录
下载链接:
https://hf-mirror.com/datasets/commaai/commaSteeringControl
下载链接
链接失效反馈官方服务:
资源简介:
---
license: mit
size_categories:
- 100K<n<1M
---
# commaSteeringControl
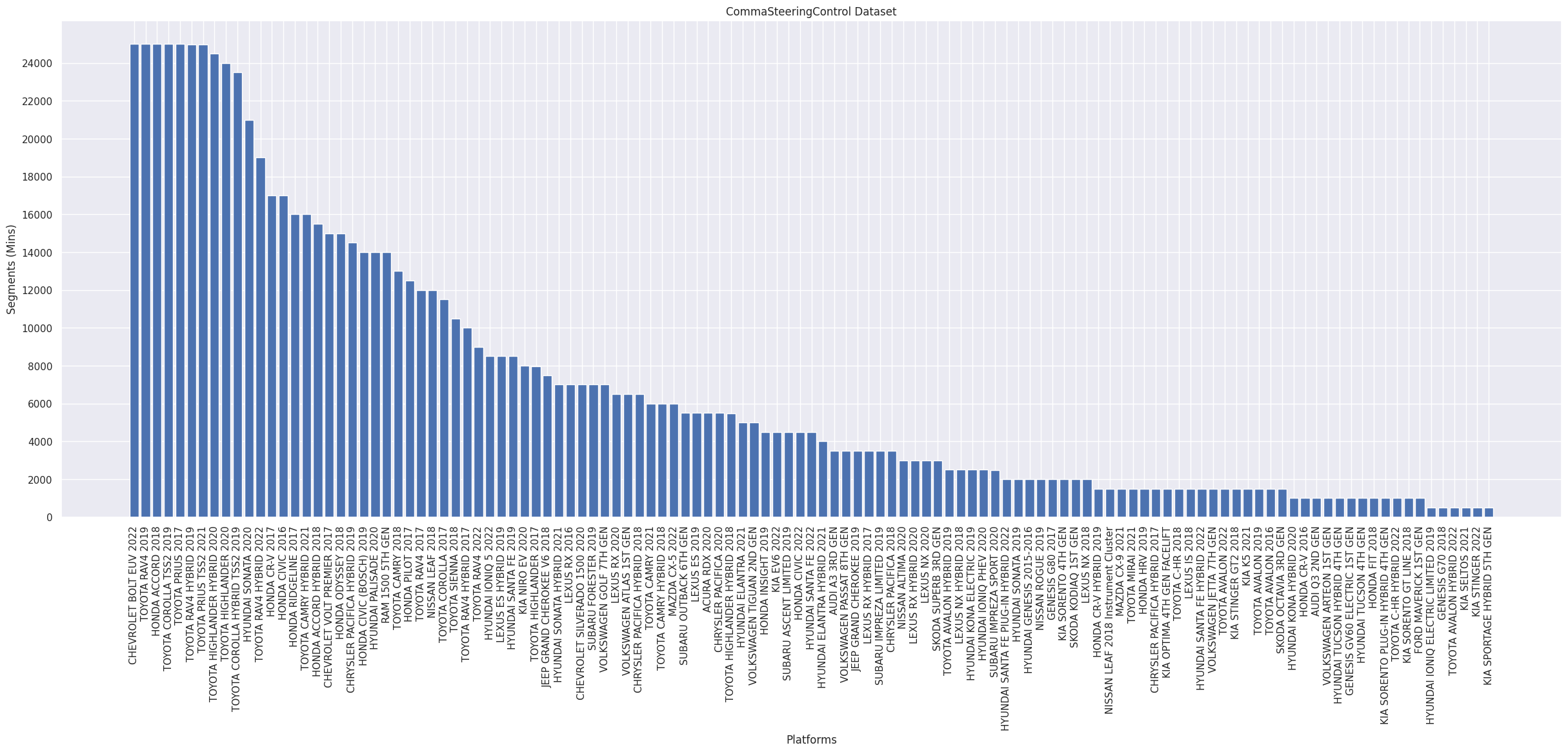
`commaSteeringControl` is a dataset of car steering measurements from ~12500 hours of driving with openpilot engaged. We control steering on most cars in openpilot using `steeringTorque`. This results in some lateral acceleration depending on both the car's internal vehicle dynamics and external factors (car speed, road roll, etc). Learning this relationship is essential to having accurate steering control in openpilot. `commaSteeringControl` is the largest controls dataset of its kind, spanning
hundreds of car models across 10+ brands.
The main purpose of this dataset is to give the community access to the data needed to model the steering of their car, and with that make a more accurate steering controller in openpilot to improve openpilot's performance on that car.
This is the largest dataset of vehicle dynamics ever released. It can also be used to develop or verify practical vehicle dynamics models for lateral acceleration, tire slip, road roll, understeer/oversteer, etc. We may add more fields for this goal in the future.
## Dataset
- Download the dataset from [HuggingFace](https://huggingface.co/datasets/commaai/commaSteeringControl/tree/main/data)
- Checkout the example notebook at [`visualize.ipynb`](https://github.com/commaai/comma-steering-control/blob/master/visualize.ipynb)
```
# Data Structure
data/
├── Platform 1
| ├── Segment 1
| ├── ...
| └── Segment N
└── Platform M
├── Segment 1
└── ...
| | Fields | Description | Value Range |
|---:|:----------------------|:---------------------------------------------------------------------------------|:----------------|
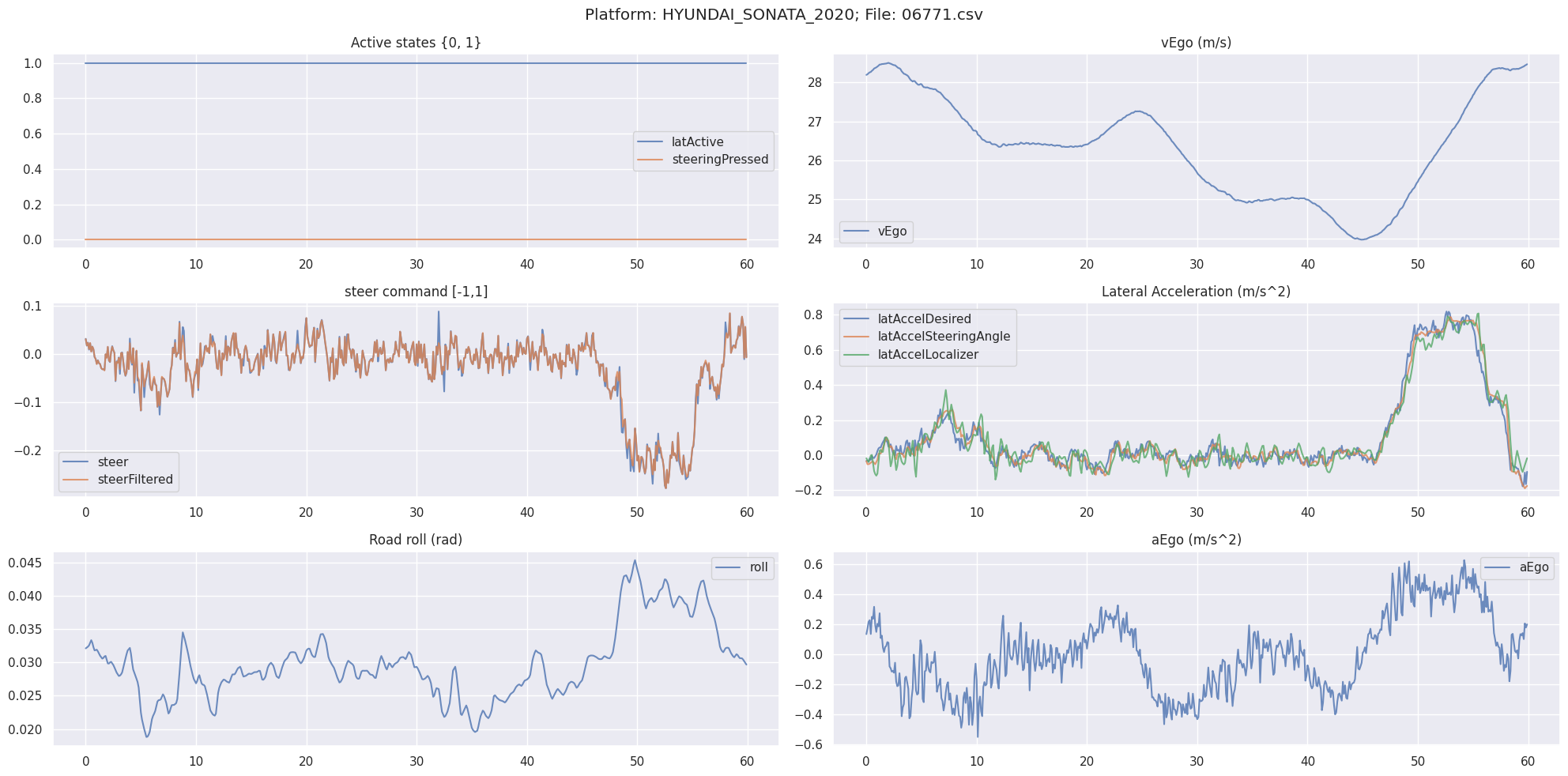
| 0 | t | Time | [0, 60] |
| 1 | latActive | Is openpilot engaged? | {True, False} |
| 2 | steeringPressed | Is steering wheel pressed by the user? | {True, False} |
| 3 | vEgo | Forward velocity of the car (m/s) | [0, ∞] |
| 4 | aEgo | Forward acceleration of the car (m/s^2) | [-∞, ∞] |
| 5 | steeringAngleDeg | Steering Angle (Deg) | [-∞, ∞] |
| 6 | steer | Normalized steer torque | [-1, 1] |
| 7 | steerFiltered | Normalized, rate limited steer torque | [-1, 1] |
| 8 | roll | Road roll (rad) | [-0.174, 0.174] |
| 9 | latAccelDesired | Lateral acceleration requested from the planner | [-∞, ∞] |
| 10 | latAccelSteeringAngle | Lateral acceleration computed from the steering wheel angle and vehicle dynamics | [-∞, ∞] |
| 11 | latAccelLocalizer | Lateral acceleration from the localizer | [-∞, ∞] |
| 12 | epsFwVersion | EPS firmware version | str |
```
## Dataset Notes
- All values from different messages are interpolated and synced to time `t`
- Steering torque is normalized in openpilot (to get `steer`), and further rate limits are applied (to get `steerFiltered`). `steerFiltered` is the best input signal.
- The `latAccelSteeringAngle` is computed from steering angle and roll using the vehicle model from openpilot. This is the best signal to predict as `latAccelLocalizer`, which comes from a sensor fusion localizer on the comma three device, can be quite noisy.
- In reality (especially for some cars), the relationship is non-linear depending on vehicle speed, and has temporal dynamics. On many cars the steering command is processed and smoothed inside the EPS causing non-linearities and temporal effects. There are also temporal effects in the physics (like in a mass-spring-damper model).
- There may be a lag in openpilot fully regaining steering control after `steeringPressed` which may have to be accounted for.
- In some platforms, cars with different `epsFwVersion` have dramatically different steering behaviour, although this is not common.
- Any algorithm that could be upstreamed to openpilot needs to be simple, fast, and reliable - similar to `torqued`, simple non-linear functions, or simple MLPs etc.
## Timeline of lateral control modeling in openpilot
- In [0.8.15](https://blog.comma.ai/0815release/#torque-controller),
we introduced a [new controller](https://github.com/commaai/openpilot/blob/master/selfdrive/controls/lib/latcontrol_torque.py) that leveraged the relationship between steering torque and lateral acceleration.
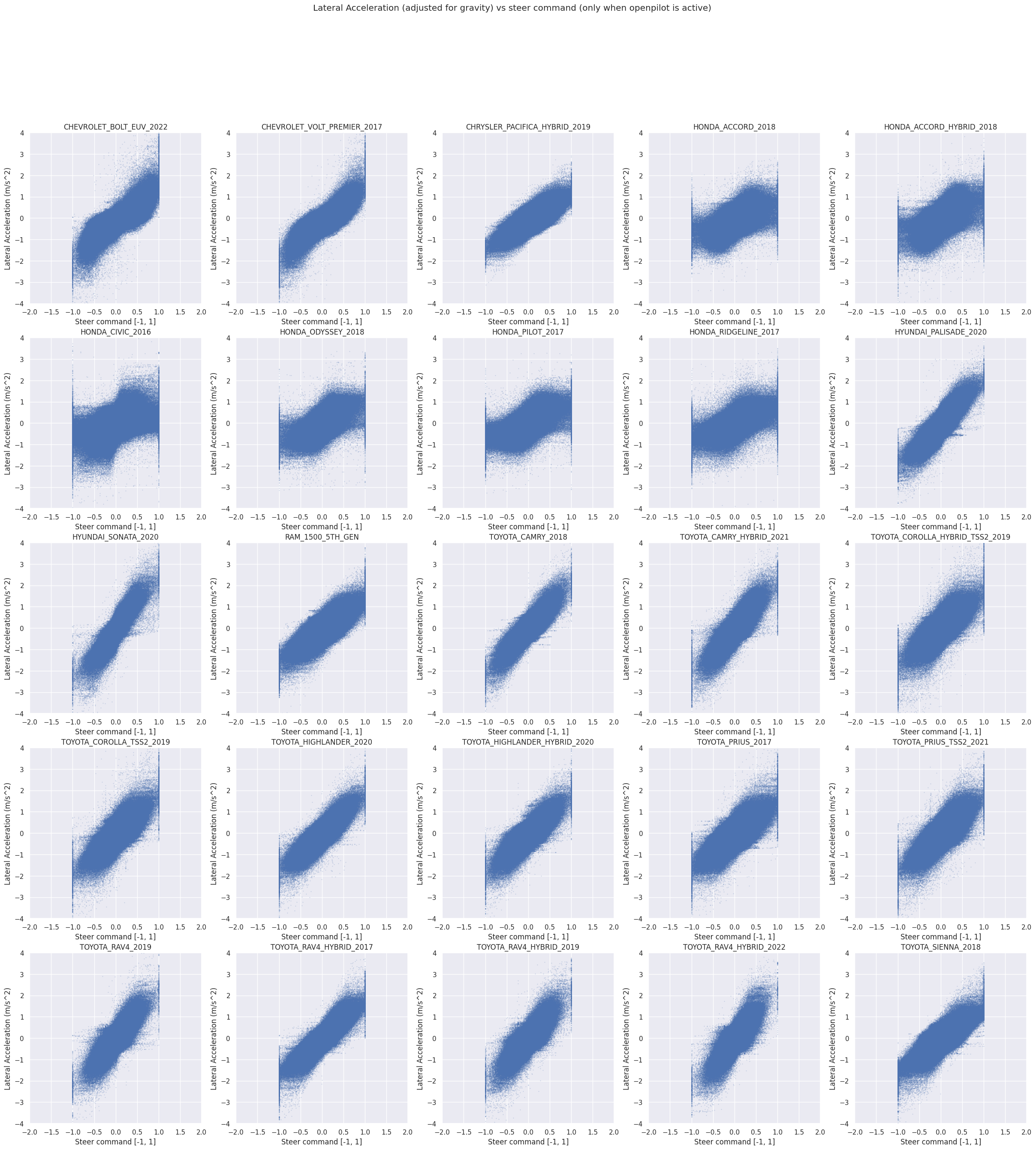
- In [0.9.0](https://blog.comma.ai/090release/#torqued-an-auto-tuner-for-lateral-control), we introduced
[torqued](https://github.com/commaai/openpilot/blob/master/selfdrive/locationd/torqued.py), which learns the relationship online. Here we assume that the gravity adjusted lateral acceleration has a linear dependence wrt. the steer command. We fit a Total-Least-Squares solution to obtain the factor. We also assume an error-dependant friction value (causes the hysteresis).
- In [0.9.2](https://blog.comma.ai/092release/#chevrolet-bolt-euv), we introduced a non-linear feed-forward function.
- There has been [extensive community effort](https://github.com/twilsonco/openpilot/tree/log-info) to improve the controller (speed-based relationships, using neural networks, etc).
- We are working on further improvements for future releases.
提供机构:
commaai
原始信息汇总
数据集概述
数据集名称
commaSteeringControl
数据集描述
commaSteeringControl 是一个包含约12500小时驾驶数据的汽车转向测量数据集,使用openpilot进行控制。该数据集涵盖了10多个品牌的数百种车型,是目前同类中最大的控制数据集。
数据集目的
主要目的是为社区提供建模汽车转向所需的数据,以改进openpilot中的转向控制器,提高特定车型上的openpilot性能。此外,该数据集还可用于开发或验证实际的车辆动力学模型,如横向加速度、轮胎滑移、道路滚动、过度转向/不足转向等。
数据集结构
数据集包含多个平台和段,每个平台下有多个段。主要数据字段包括时间、是否启用openpilot、用户是否按下方向盘、车辆前进速度和加速度、转向角度、标准化转向扭矩等。
数据字段详情
| 字段 | 描述 | 值范围 |
|---|---|---|
| t | 时间 | [0, 60] |
| latActive | 是否启用openpilot | {True, False} |
| steeringPressed | 用户是否按下方向盘 | {True, False} |
| vEgo | 车辆前进速度(m/s) | [0, ∞] |
| aEgo | 车辆前进加速度(m/s^2) | [-∞, ∞] |
| steeringAngleDeg | 转向角度(度) | [-∞, ∞] |
| steer | 标准化转向扭矩 | [-1, 1] |
| steerFiltered | 标准化、速率限制的转向扭矩 | [-1, 1] |
| roll | 道路滚动(弧度) | [-0.174, 0.174] |
| latAccelDesired | 计划器请求的横向加速度 | [-∞, ∞] |
| latAccelSteeringAngle | 从转向轮角度和车辆动力学计算的横向加速度 | [-∞, ∞] |
| latAccelLocalizer | 来自本地化器的横向加速度 | [-∞, ∞] |
| epsFwVersion | EPS固件版本 | str |
数据集使用注意事项
- 所有不同消息的值都已插值并同步到时间
t。 - 转向扭矩在openpilot中标准化,并应用进一步的速率限制。
latAccelSteeringAngle是从转向角度和滚动使用openpilot车辆模型计算的。- 实际中,特别是在某些车辆上,这种关系是非线性的,并具有时间动态。
- 在某些平台上,具有不同
epsFwVersion的车辆可能具有显著不同的转向行为。
下载链接
数据集可从HuggingFace下载。
搜集汇总
数据集介绍
以上内容由遇见数据集搜集并总结生成


