Dur360BEV
收藏github2025-03-20 更新2025-03-25 收录
下载链接:
https://github.com/Tom-E-Durham/Dur360BEV
下载链接
链接失效反馈官方服务:
资源简介:
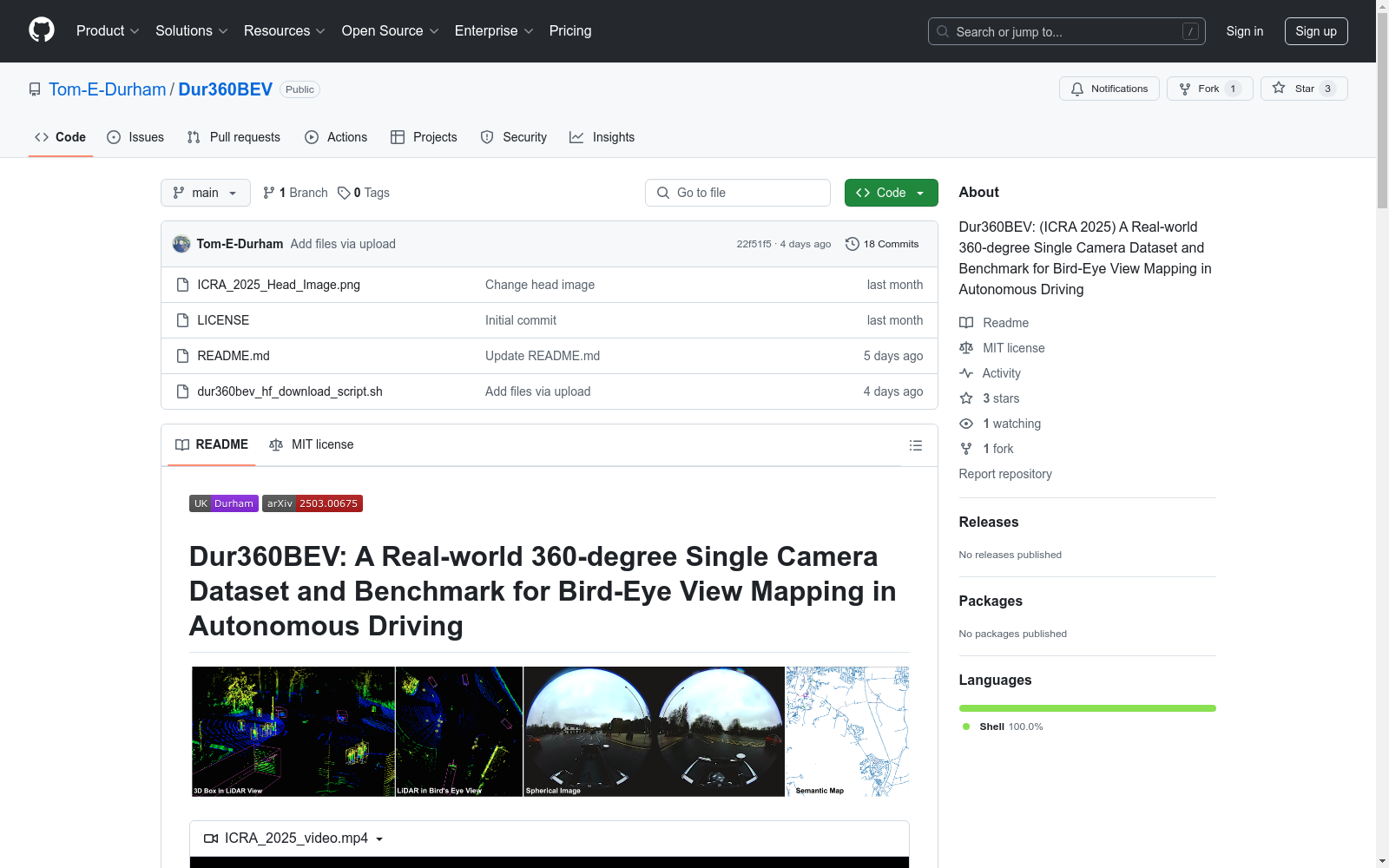
Dur360BEV是一个新颖的球形相机自动驾驶数据集,配备128通道3D LiDAR和RTK精炼GNSS/INS系统,以及一个用于使用单个球形相机生成鸟瞰图(BEV)的基准。该数据集通过减少硬件复杂性,用单个360度相机替代多个透视相机,解决了BEV生成的挑战。
Dur360BEV is a novel spherical-camera-based autonomous driving dataset equipped with a 128-channel 3D LiDAR, an RTK-refined GNSS/INS system, and a benchmark for generating Bird's Eye View (BEV) using a single spherical camera. This dataset addresses the challenges in BEV generation by reducing hardware complexity, replacing multiple perspective cameras with a single 360-degree camera.
创建时间:
2025-02-27
原始信息汇总
Dur360BEV 数据集概述
基本信息
- 数据集名称: Dur360BEV
- 数据集类型: 自动驾驶数据集
- 主要特点:
- 使用单球形摄像头进行鸟瞰图(BEV)映射
- 包含128通道3D LiDAR和高精度GNSS/INS系统
- 旨在降低硬件复杂性
数据集内容
-
传感器配置:
- LiDAR: Ouster OS1-128,128通道垂直分辨率
- 球形摄像头: Ricoh Theta S,双1/2.3" 12M CMOS传感器,1280×640分辨率,15Hz捕获频率
- GNSS/INS: OxTS RT3000v3,支持GPS、GLONASS、BeiDou、Galileo、PPP和SBAS星座
-
数据集结构:
dataset/ ├── image │ ├── data │ └── timestamps.txt ├── labels │ ├── data │ ├── dataformat.txt │ └── timestamps.txt ├── md5sums.txt ├── metadata │ └── os1.json ├── ouster_points │ ├── data │ ├── dataformat.txt │ └── timestamps.txt └── oxts ├── data ├── dataformat.txt └── timestamps.txt
下载信息
-
下载链接:
-
下载要求:
- 需要Hugging Face账号和访问权限
- 需安装Hugging Face CLI工具
环境设置
- 安装步骤: bash git clone https://github.com/yourusername/icra2025-dur360bev.git cd icra2025-dur360bev python3 -m venv dur360bev source dur360bev/bin/activate pip install -r requirements.txt
相关资源
- 论文: arXiv:2503.00675
搜集汇总
数据集介绍
构建方式
Dur360BEV数据集作为自动驾驶领域的重要资源,其构建过程体现了多传感器融合的前沿理念。研究团队采用高精度Ouster OS1-128激光雷达进行三维环境扫描,配合Ricoh Theta S双鱼眼相机实现360度全景影像采集,并通过OxTS RT3000v3组合导航系统获取厘米级定位数据。数据采集过程中严格保持传感器时空同步,采用15Hz的采样频率确保动态场景的连贯性。数据标注环节遵循国际标准,由专业团队对激光雷达点云进行语义分割,生成精确的鸟瞰图标注。
特点
该数据集最显著的特点是采用单球面相机替代传统多视角相机阵列,大幅降低了硬件复杂度。全景影像与128线激光雷达点云的精确配准,为BEV生成任务提供了丰富的多模态数据。数据集包含城市道路、交叉路口等复杂场景,标注信息涵盖车道线、交通标志等关键要素。特别设计的SI2BEV投影模块解决了球面图像到鸟瞰图的空间转换难题,配套的适应性焦点损失函数有效缓解了类别不平衡问题。
使用方法
研究人员可通过Hugging Face平台申请访问权限,使用提供的Bash脚本实现数据批量下载。数据集采用分层目录结构存储,包含原始图像、激光雷达点云、标注数据及时间同步文件。配套的虚拟环境配置脚本确保研究复现性,requirements.txt文件详细列明了所有依赖库。建议使用者先通过metadata中的传感器参数文件理解数据采集坐标系,再结合timestamps.txt实现多源数据的时间对齐。对于SI2BEV模块的应用,需重点关注球面投影采样策略的参数调整。
背景与挑战
背景概述
Dur360BEV数据集由英国杜伦大学研究团队于2025年发布,旨在推动自动驾驶领域鸟瞰图(BEV)生成技术的研究。该数据集创新性地采用单一360度球形相机替代传统多视角相机阵列,结合128通道3D激光雷达和高精度GNSS/INS系统,为降低硬件复杂度提供了新的解决方案。其核心研究问题聚焦于如何通过简化传感器配置实现高质量的BEV地图生成,相关成果发表于机器人领域顶级会议ICRA 2025。作为首个基于球形相机的BEV基准数据集,Dur360BEV为自动驾驶环境感知系统的轻量化设计提供了重要研究平台。
当前挑战
在技术层面,Dur360BEV需解决球形图像向BEV空间投影时的几何畸变校正难题,研究团队为此开发了SI2BEV模块及改进的采样策略。数据集构建过程中面临多传感器时空同步精度控制、球形相机与激光雷达标定等工程挑战。领域应用方面,极端类别不平衡的BEV分割任务要求设计自适应损失函数,而单相机方案在远距离感知精度上仍需突破传统多相机系统的性能瓶颈。
常用场景
经典使用场景
Dur360BEV数据集在自动驾驶领域中被广泛用于鸟瞰图(BEV)生成的研究。通过使用单一球形相机替代传统的多视角相机系统,该数据集显著降低了硬件复杂度,同时提供了高质量的360度环境感知数据。研究人员可以利用该数据集进行BEV地图生成的算法开发和性能评估,特别是在复杂城市环境中。
解决学术问题
Dur360BEV数据集解决了自动驾驶研究中BEV生成的高硬件依赖性和复杂性问题。通过提供高精度的LiDAR和GNSS/INS数据,该数据集为BEV算法的训练和验证提供了可靠的基础。其独特的SI2BEV模块和自适应Focal Loss方法有效缓解了BEV分割中的类别不平衡问题,推动了BEV生成技术的进步。
衍生相关工作
Dur360BEV数据集衍生了一系列经典研究工作,特别是在BEV生成和自动驾驶感知领域。基于该数据集的研究提出了多种改进的BEV投影算法和分割方法,进一步推动了单一相机BEV生成技术的发展。这些工作不仅提升了算法的性能,还为自动驾驶系统的实际部署提供了理论和技术支持。
以上内容由遇见数据集搜集并总结生成


