Campus Visual Navigation Video, YQ Dataset, AeroGround Dataset, WeakPair Datset
收藏github2023-12-27 更新2024-05-31 收录
下载链接:
https://github.com/ZJU-Robotics-Lab/OpenDataSet
下载链接
链接失效反馈官方服务:
资源简介:
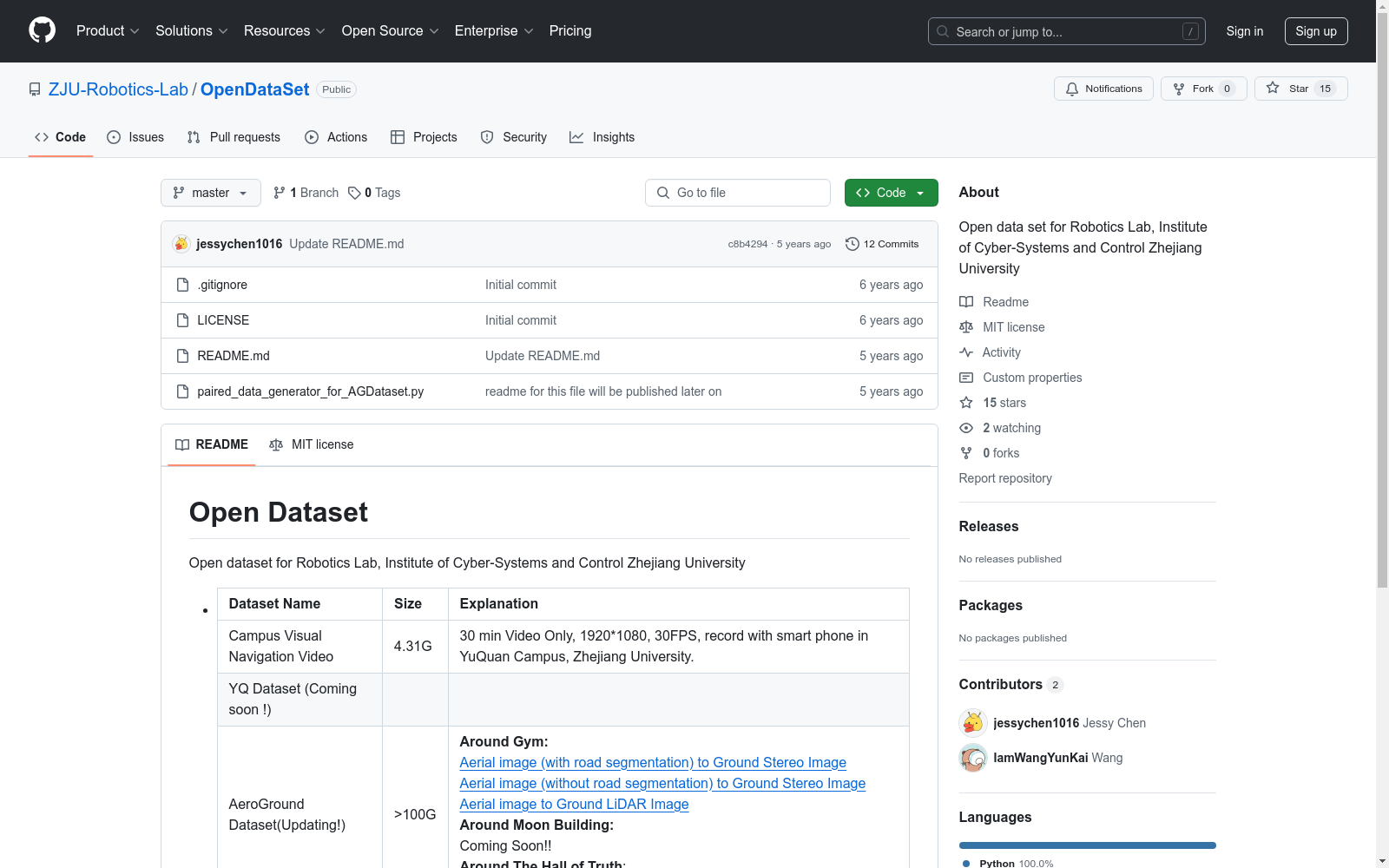
校园视觉导航视频:仅30分钟视频,1920*1080分辨率,30FPS,使用智能手机在浙江大学玉泉校区录制。
YQ数据集:即将推出。
AeroGround数据集:更新中,包括空中图像与地面立体图像的对应,以及空中图像与地面激光雷达图像的对应。
弱对数据集:在模拟自动驾驶环境CARLA中收集,从鸟瞰视角拍摄,包含原始RGB数据、道路分割数据、车辆检测数据、深度数据和位置数据。
Campus Visual Navigation Video: A 30-minute video with a resolution of 1920*1080, 30FPS, recorded using a smartphone at the Yuquan Campus of Zhejiang University.
YQ Dataset: Coming soon.
AeroGround Dataset: Currently updating, including correspondences between aerial images and ground stereo images, as well as between aerial images and ground LiDAR images.
Weakly Paired Dataset: Collected in the CARLA simulated autonomous driving environment, captured from a bird's-eye view, containing original RGB data, road segmentation data, vehicle detection data, depth data, and location data.
创建时间:
2019-11-06
原始信息汇总
数据集概述
数据集名称及详情
1. Campus Visual Navigation Video
- 大小: 4.31G
- 内容描述: 30分钟视频,分辨率1920*1080,30FPS,使用智能手机在浙江大学玉泉校区录制。
2. AeroGround Dataset
- 大小: >100G
- 内容描述:
- Around Gym:
- Around Moon Building: 即将推出
- Around The Hall of Truth: 即将推出
3. WeakPair Dataset
- 大小: 10.2G
- 内容描述: 在模拟自动驾驶环境CARLA中收集,从鸟瞰视角拍摄,包含两个不同城镇(Town1 & Town2)的数据。数据包括:
- 原始RGB数据
- 道路分割数据
- 车辆检测数据(YOLO格式)
- 深度数据
- 位置数据
其他信息
- YQ Dataset: 即将推出
搜集汇总
数据集介绍
构建方式
Campus Visual Navigation Video数据集通过智能手机在浙江大学玉泉校区内进行录制,视频时长为30分钟,分辨率为1920*1080,帧率为30FPS。AeroGround数据集则通过无人机和地面设备在多个地点(如体育馆、月亮楼和真理堂)采集,包含空中图像与地面立体图像的对应关系,数据量超过100GB。WeakPair数据集则是在CARLA模拟自动驾驶环境中生成,采用鸟瞰视角,包含两个不同城镇(Town1和Town2)的随机生成车辆数据,涵盖RGB图像、道路分割、车辆检测、深度信息和位置数据等多维度信息。
使用方法
Campus Visual Navigation Video数据集可直接用于视觉导航算法的训练与测试,通过提取视频帧进行特征分析和路径规划。AeroGround数据集适用于跨视角感知任务的研究,用户可通过对比空中与地面图像,开发多模态融合算法。WeakPair数据集则可用于自动驾驶模拟环境的算法验证,用户可通过其提供的多维度数据(如道路分割和车辆检测)进行感知与决策模型的训练与评估。
背景与挑战
背景概述
Campus Visual Navigation Video、YQ Dataset、AeroGround Dataset和WeakPair Dataset是由浙江大学控制科学与工程学院机器人实验室发布的一系列开放数据集,旨在推动机器人视觉导航与自主驾驶领域的研究。这些数据集涵盖了从校园环境到模拟驾驶场景的多样化数据,创建时间主要集中在近年,反映了该领域对高精度、多模态数据的需求。Campus Visual Navigation Video通过智能手机记录了浙江大学玉泉校区的视觉导航视频,为地面机器人导航提供了真实场景数据。AeroGround Dataset则聚焦于空中与地面图像的跨模态映射,为无人机与地面机器人的协同导航提供了重要支持。WeakPair Dataset基于CARLA模拟环境生成,专注于自动驾驶中的鸟瞰视角数据,为车辆检测与道路分割等任务提供了丰富的标注信息。这些数据集在机器人视觉导航、自动驾驶等领域具有广泛的应用潜力。
当前挑战
这些数据集在构建与应用中面临多重挑战。首先,Campus Visual Navigation Video虽然提供了真实场景数据,但其单一视角与有限场景覆盖可能限制了模型的泛化能力。AeroGround Dataset的挑战在于跨模态数据的对齐与融合,如何高效地将空中图像与地面图像进行匹配仍是一个技术难点。WeakPair Dataset虽然提供了丰富的多模态数据,但其基于模拟环境生成,数据与真实场景的差异可能导致模型在实际应用中的性能下降。此外,这些数据集的数据规模庞大,对存储、处理与计算资源提出了较高要求,如何在有限资源下高效利用这些数据也是研究者需要解决的问题。
常用场景
经典使用场景
Campus Visual Navigation Video数据集主要用于视觉导航算法的开发和测试。该数据集通过高分辨率视频捕捉浙江大学玉泉校区的实际环境,为研究者提供了一个真实世界的场景,用于训练和验证视觉导航系统。这种数据集特别适用于需要高精度环境感知和路径规划的应用,如自动驾驶车辆和无人机导航。
解决学术问题
该数据集解决了视觉导航领域中的关键问题,如环境感知的准确性和实时性。通过提供高分辨率的视频数据,研究者可以更精确地模拟和测试导航算法,从而提高算法在实际应用中的可靠性和效率。这对于推动自动驾驶和无人机技术的发展具有重要意义。
实际应用
在实际应用中,Campus Visual Navigation Video数据集可以用于开发智能交通系统、无人驾驶车辆和无人机导航系统。这些系统依赖于高精度的环境感知和路径规划,数据集提供的真实场景视频能够显著提高这些系统的性能和安全性。
数据集最近研究
最新研究方向
在机器人视觉导航领域,Campus Visual Navigation Video数据集为校园环境下的视觉导航算法提供了宝贵的真实场景数据。该数据集通过高分辨率视频捕捉了浙江大学玉泉校区的复杂环境,为研究者在动态和静态环境下的视觉导航算法开发与测试提供了坚实的基础。与此同时,AeroGround数据集通过结合空中图像与地面立体图像,推动了无人机与地面机器人协同导航的研究,尤其是在复杂城市环境中的应用。WeakPair数据集则通过模拟自动驾驶环境CARLA,提供了丰富的多模态数据,包括道路分割、车辆检测和深度信息,为自动驾驶系统的感知与决策算法优化提供了重要支持。这些数据集共同推动了机器人视觉导航与自动驾驶领域的前沿研究,具有重要的学术与应用价值。
以上内容由遇见数据集搜集并总结生成


