Echo系统
收藏arXiv2025-04-11 更新2025-04-15 收录
下载链接:
https://eterwait.github.io/Echo/
下载链接
链接失效反馈官方服务:
资源简介:
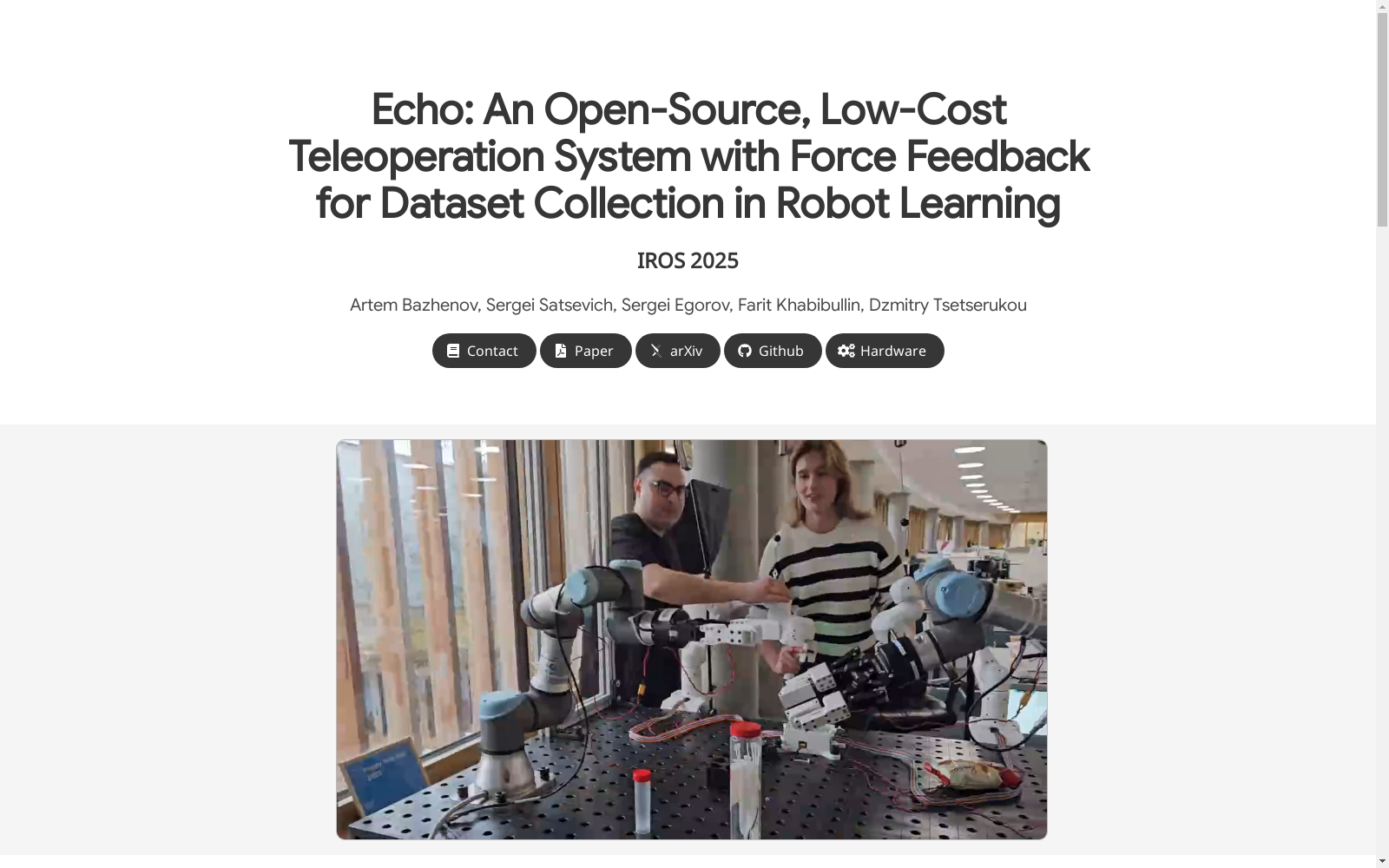
Echo系统是一种新型的关节匹配遥操作系统,设计用于增强手动和双手动任务数据集的收集。该系统专门针对UR操纵器进行控制,并配备了具有力反馈和可调节灵敏度模式的定制控制器,使操作精确且直观。系统集成了用户友好的数据记录界面,简化了用于模仿学习的高质量训练数据的收集过程。尽管当前的实现侧重于UR操纵器,但Echo的架构是可重构的,可以适应其他操纵器和人形系统。
The Echo system is a novel joint-matching teleoperation system designed to enhance the collection of manual and bimanual task datasets. Specifically dedicated to the control of the UR manipulator, it is equipped with a custom controller integrated with force feedback and adjustable sensitivity modes, enabling precise and intuitive operation. The system also features a user-friendly data recording interface, which simplifies the collection process of high-quality training data for imitation learning. While the current implementation focuses on the UR manipulator, the architecture of Echo is reconfigurable and adaptable to other manipulators and humanoid systems.
提供机构:
斯科尔科沃科技学院
创建时间:
2025-04-11
搜集汇总
数据集介绍
构建方式
Echo系统通过关节匹配技术构建,采用主从式控制架构,用户通过操纵杆控制从属机器人的关节运动。系统包含定制的力反馈控制器和可调节灵敏度模式,确保操作的精确性和直观性。所有电子元件和线路均内置于设备主体中,提升了系统的耐用性和可维护性。硬件部分主要由3D打印的PLA塑料件和金属杆构成,结合TPU95A塑料制成的柔性元件,实现了低成本且高性能的设计。
特点
Echo系统具备低成本力反馈机制,显著提升了复杂精细操作任务的执行效率。其用户友好的控制界面集成了灵敏度调节和数据集记录功能,支持三种灵敏度模式以适应不同精度需求。系统采用模块化设计,关节和操纵杆均配备电位器传感器,结合噪声抑制电路,确保了高精度的运动捕捉和数据采集。此外,系统的开源性使得研究人员能够灵活地对其进行定制和扩展。
使用方法
用户通过操纵杆直接控制UR机械臂的关节运动,力反馈机制实时传递末端执行器的接触力信息。操纵杆上的按钮支持一键启停数据集记录,并允许动态调整灵敏度模式。系统通过USB接口与计算机通信,实时传输关节位置和力传感器数据。研究人员可利用开源代码和硬件设计文档,快速部署系统并采集高质量的机器人操作数据,适用于模仿学习等研究场景。
背景与挑战
背景概述
Echo系统是由俄罗斯斯科尔科沃科学技术研究所的Artem Bazhenov、Sergei Satsevich等研究人员于2025年提出的开源低成本遥操作系统,专为机器人学习领域的数据集采集而设计。该系统通过创新的关节匹配架构和力反馈机制,解决了机器人模仿学习中高质量训练数据获取困难的瓶颈问题。Echo系统针对UR机械臂的控制进行了优化,其模块化设计允许扩展到其他机械臂和人形机器人平台。该研究团队受到Transformer架构在语言模型领域成功的启发,致力于推动具身智能在非结构化环境中的操作能力,其开源性设计显著降低了机器人学习研究的门槛,为模仿学习领域提供了重要的基础设施支持。
当前挑战
Echo系统主要应对机器人学习领域的两大核心挑战:在领域问题层面,传统方法难以获取足够规模且高质量的接触式操作数据,特别是需要双手机械臂协同的精细操作任务;在系统构建层面,现有遥操作系统普遍存在成本高昂、力反馈机制缺失、操作精度不足等问题。具体技术挑战包括:多自由度关节的精确运动映射、低成本力反馈机构的可靠性设计、用户操作界面的实时性优化,以及系统在小型化量产时的结构稳定性保障。此外,系统需要平衡传感器的噪声抑制与成本控制,确保在复杂操作任务中保持毫米级定位精度,同时满足不同操作场景下的灵敏度调节需求。
常用场景
经典使用场景
Echo系统在机器人学习领域的数据集收集中展现出卓越的性能,尤其是在需要高精度和复杂操作的任务中。该系统通过关节匹配和力反馈机制,实现了对UR机械臂的精确控制,适用于双手机器人操作和精细物体抓取等场景。其开源性设计使得研究者和实验室能够轻松复现和扩展系统功能,进一步推动了机器人模仿学习的发展。
衍生相关工作
Echo系统的设计理念和开源特性催生了一系列相关研究。例如,基于其力反馈机制,研究者开发了更高效的机器人抓取算法;其关节匹配设计启发了新型遥操作系统的开发。系统与RT-X数据集和Octo等开源机器人策略的结合,进一步推动了机器人通用模型的研究。这些衍生工作不仅扩展了Echo系统的应用范围,也为机器人学习领域提供了新的研究方向。
数据集最近研究
最新研究方向
在机器人学习领域,Echo系统以其创新的低成本力反馈遥操作架构,正推动着模仿学习数据集采集技术的革新。该系统通过关节匹配原理与模块化设计,实现了对UR机械臂的精准控制,其独特的电位器传感方案在保持精度的同时显著降低了硬件成本。当前研究热点集中在如何将此类开源系统与新兴的机器人基础模型相结合,特别是在双手机器人操作任务中,Echo系统采集的高质量示教数据能够有效提升RT-X等跨平台模型的泛化能力。随着具身智能研究的深入,该数据集在解决复杂操作任务中的力觉传递问题展现出独特价值,为实验室和初创企业提供了可复现的硬件解决方案。
相关研究论文
- 1Echo: An Open-Source, Low-Cost Teleoperation System with Force Feedback for Dataset Collection in Robot Learning斯科尔科沃科技学院 · 2025年
以上内容由遇见数据集搜集并总结生成


