Open X-Embodiment 真实机器人数据集
收藏超神经2024-09-24 更新2024-12-14 收录
下载链接:
https://hyper.ai/cn/datasets/34317
下载链接
链接失效反馈官方服务:
资源简介:
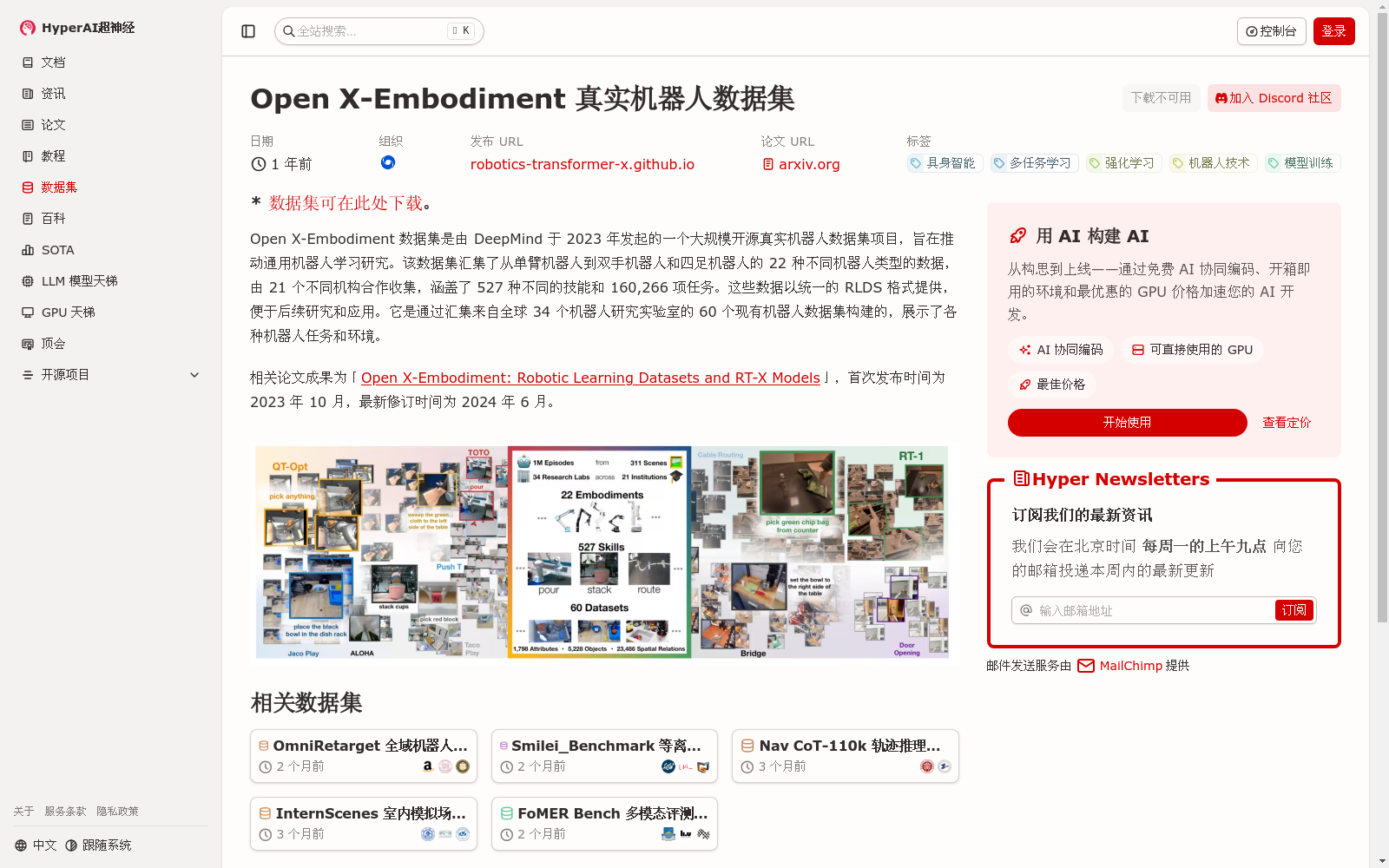
Open X-Embodiment 数据集是由 DeepMind 于 2023 年发起的一个大规模开源真实机器人数据集项目,旨在推动通用机器人学习研究。该数据集汇集了从单臂机器人到双手机器人和四足机器人的 22 种不同机器人类型的数据,由 21 个不同机构合作收集,涵盖了 527 种不同的技能和 160,266 项任务。这些数据以统一的 RLDS 格式提供,便于后续研究和应用。它是通过汇集来自全球 34 个机器人研究实验室的 60 个现有机器人数据集构建的,展示了各种机器人任务和环境。
The Open X-Embodiment Dataset is a large-scale open-source real-world robotics dataset project initiated by DeepMind in 2023, aiming to advance general robotics learning research. This dataset compiles data from 22 distinct robot types spanning single-arm robots, dual-arm robots to quadruped robots, which was collected through collaborations across 21 different institutions, covering 527 unique skills and 160,266 tasks. All data is provided in a unified RLDS format to facilitate subsequent research and applications. It is constructed by integrating 60 existing robotics datasets from 34 global robotics research laboratories, showcasing a diverse range of robotic tasks and environments.
创建时间:
2024-09-12
搜集汇总
数据集介绍
背景与挑战
背景概述
Open X-Embodiment 真实机器人数据集是由 DeepMind 发起的大规模开源项目,旨在推动通用机器人学习研究。它汇集了来自全球 34 个实验室的 60 个现有数据集,涵盖 22 种机器人类型、527 种技能和超过 16 万项任务,数据以统一的 RLDS 格式提供,便于多任务学习和模型训练。
以上内容由遇见数据集搜集并总结生成


