---
license: mit
language:
- en
task_categories:
- object-detection
- depth-estimation
- image-segmentation
tags:
- dataset
- aerial
- synthetic
- domain adaptation
- sim2real
---
<!-- <div align="center"> -->
# SkyScenes: A Synthetic Dataset for Aerial Scene Understanding
[Sahil Khose](https://sahilkhose.github.io/)\*, [Anisha Pal](https://anipal.github.io/)\*, [Aayushi Agarwal](https://www.linkedin.com/in/aayushiag/)\*, [Deepanshi](https://www.linkedin.com/in/deepanshi-d/)\*, [Judy Hoffman](https://faculty.cc.gatech.edu/~judy/), [Prithvijit Chattopadhyay](https://prithv1.xyz/)
<!-- </div> -->
[](https://huggingface.co/datasets/hoffman-lab/SkyScenes)[](https://hoffman-group.github.io/SkyScenes/)[](https://arxiv.org/abs/2312.06719)
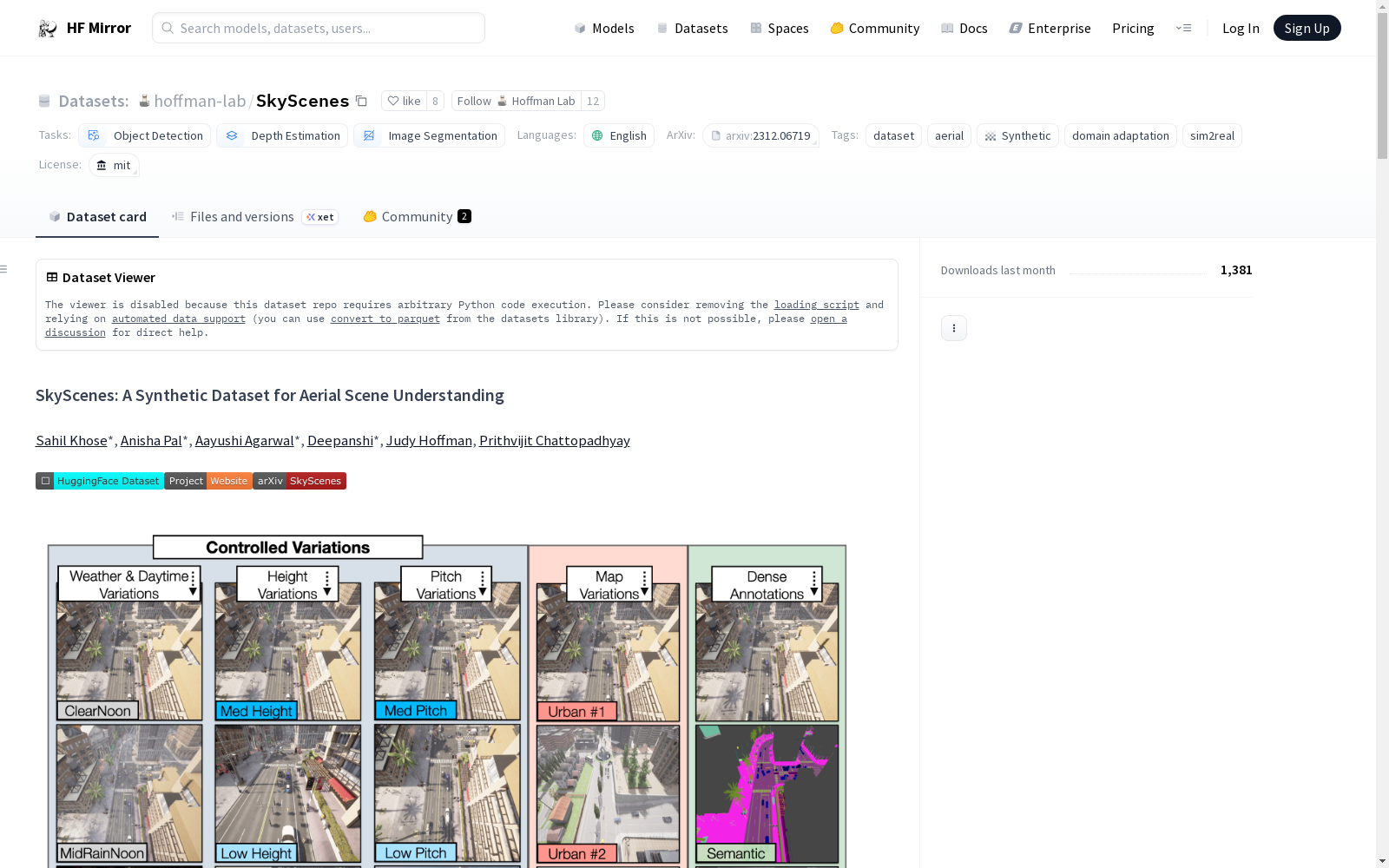
<img src="./assets/teaser.jpeg" width="100%"/>
## Dataset Summary
Real-world aerial scene understanding is limited by a lack of datasets that contain densely annotated images curated under a diverse set of conditions.
Due to inherent challenges in obtaining such images in controlled real-world settings,
we present SkyScenes, a synthetic dataset of densely annotated aerial images captured from Unmanned Aerial Vehicle (UAV) perspectives.
**SkyScenes** images are carefully curated from **CARLA** to comprehensively capture diversity across layout (urban and rural maps), weather conditions, times of day, pitch angles and altitudes with corresponding semantic, instance and depth annotations.
**SkyScenes** features **33,600** images in total, which are spread across 8 towns, 5 weather and daytime conditions and 12 height and pitch variations.
## 📣 Announcement
SkyScenes has been accepted at [ECCV 2024](https://www.ecva.net/papers/eccv_2024/papers_ECCV/html/10113_ECCV_2024_paper.php) !
## SkyScenes Details
<details>
<summary>Click to view the detailed list of all variations</summary>
- **Layout Variations(Total 8):**:
- Town01
- Town02
- Town03
- Town04
- Town05
- Town06
- Town07
- Town10HD
_Town07 features Rural Scenes, whereas the rest of the towns feature Urban scenes_
- **Weather & Daytime Variations(Total 5):**
- ClearNoon
- ClearSunset
- ClearNight
- CloudyNoon
- MidRainyNoon
- **Height and Pitch Variations of UAV Flight(Total 12):**
- Height = 15m, Pitch = 0°
- Height = 15m, Pitch = 45°
- Height = 15m, Pitch = 60°
- Height = 15m, Pitch = 90°
- Height = 35m, Pitch = 0°
- Height = 35m, Pitch = 45°
- Height = 35m, Pitch = 60°
- Height = 35m, Pitch = 90°
- Height = 60m, Pitch = 0°
- Height = 60m, Pitch = 45°
- Height = 60m, Pitch = 60°
- Height = 60m, Pitch = 90°
</details>
<details>
<summary>Click to view class definitions, color palette and class IDs for Semantic Segmentation</summary>
**SkyScenes** semantic segmentation labels span 28 classes which can be further collapsed to 20 classes.
| Class ID | Class ID (collapsed) | RGB Color Palette | Class Name | Definition |
|----------|--------------------|-------------------|------------------|----------------------------------------------------------------------------------------------------|
| 0 | -1 | <span style="color:rgb(0, 0, 0)"> (0, 0, 0) </span> | unlabeled | Elements/objects in the scene that have not been categorized |
| 1 | 2 | <span style="color:rgb(70, 70, 70)"> (70, 70, 70) </span> | building | Includes houses, skyscrapers, and the elements attached to them |
| 2 | 4 | <span style="color:rgb(190, 153, 153)"> (190, 153, 153) </span> | fence | Wood or wire assemblies that enclose an area of ground |
| 3 | -1 | <span style="color:rgb(55, 90, 80)"> (55, 90, 80) </span> | other | Uncategorized elements |
| 4 | 11 | <span style="color:rgb(220, 20, 60)"> (220, 20, 60) </span> | pedestrian | Humans that walk |
| 5 | 5 | <span style="color:rgb(153, 153, 153)"> (153, 153, 153) </span> | pole | Vertically oriented pole and its horizontal components if any |
| 6 | 16 | <span style="color:rgb(157, 234, 50)"> (157, 234, 50) </span> | roadline | Markings on road |
| 7 | 0 | <span style="color:rgb(128, 64, 128)"> (128, 64, 128) </span> | road | Lanes, streets, paved areas on which cars drive |
| 8 | 1 | <span style="color:rgb(244, 35, 232)"> (244, 35, 232) </span> | sidewalk | Parts of ground designated for pedestrians or cyclists |
| 9 | 8 | <span style="color:rgb(107, 142, 35)"> (107, 142, 35) </span> | vegetation | Trees, hedges, all kinds of vertical vegetation (ground-level vegetation is not included here) |
| 10 | 13 | <span style="color:rgb(0, 0, 142)"> (0, 0, 142) </span> | cars | Cars in scene |
| 11 | 3 | <span style="color:rgb(102, 102, 156)"> (102, 102, 156) </span> | wall | Individual standing walls, not part of buildings |
| 12 | 7 | <span style="color:rgb(220, 220, 0)"> (220, 220, 0) </span> | traffic sign | Signs installed by the state/city authority, usually for traffic regulation |
| 13 | 10 | <span style="color:rgb(70, 130, 180)"> (70, 130, 180) </span> | sky | Open sky, including clouds and sun |
| 14 | -1 | <span style="color:rgb(81, 0, 81)"> (81, 0, 81) </span> | ground | Any horizontal ground-level structures that do not match any other category |
| 15 | -1 | <span style="color:rgb(150, 100, 100)"> (150, 100, 100) </span> | bridge | The structure of the bridge |
| 16 | -1 | <span style="color:rgb(230, 150, 140)"> (230, 150, 140) </span> | railtrack | Rail tracks that are non-drivable by cars |
| 17 | -1 | <span style="color:rgb(180, 165, 180)"> (180, 165, 180) </span> | guardrail | Guard rails / crash barriers |
| 18 | 6 | <span style="color:rgb(250, 170, 30)"> (250, 170, 30) </span> | traffic light | Traffic light boxes without their poles |
| 19 | -1 | <span style="color:rgb(110, 190, 160)"> (110, 190, 160) </span> | static | Elements in the scene and props that are immovable |
| 20 | -1 | <span style="color:rgb(170, 120, 50)"> (170, 120, 50) </span> | dynamic | Elements whose position is susceptible to change over time |
| 21 | 19 | <span style="color:rgb(45, 60, 150)"> (45, 60, 150) </span> | water | Horizontal water surfaces |
| 22 | 9 | <span style="color:rgb(152, 251, 152)"> (152, 251, 152) </span> | terrain | Grass, ground-level vegetation, soil, or sand |
| 23 | 12 | <span style="color:rgb(255, 0, 0)"> (255, 0, 0) </span> | rider | Humans that ride/drive any kind of vehicle or mobility system |
| 24 | 18 | <span style="color:rgb(119, 11, 32)"> (119, 11, 32) </span> | bicycle | Bicycles in scenes |
| 25 | 17 | <span style="color:rgb(0, 0, 230)"> (0, 0, 230) </span> | motorcycle | Motorcycles in scene |
| 26 | 15 | <span style="color:rgb(0, 60, 100)"> (0, 60, 100) </span> | bus | Buses in scenes |
| 27 | 14 | <span style="color:rgb(0, 0, 70)"> (0, 0, 70) </span> | truck | Trucks in scenes |
|
</details>
## Dataset Structure
The dataset is organized in the following structure:
<!--<details>
<summary><strong>Images (RGB Images)</strong></summary>
- ***H_15_P_0***
- *ClearNoon*
- Town01.tar.gz
- Town02.tar.gz
- ...
- Town10HD.tar.gz
- *ClearSunset*
- Town01.tar.gz
- Town02.tar.gz
- ...
- Town10HD.tar.gz
- *ClearNight*
- Town01.tar.gz
- Town02.tar.gz
- ...
- Town10HD.tar.gz
- *CloudyNoon*
- Town01.tar.gz
- Town02.tar.gz
- ...
- Town10HD.tar.gz
- *MidRainyNoon*
- Town01.tar.gz
- Town02.tar.gz
- ...
- Town10HD.tar.gz
- ***H_15_P_45***
- ...
- ...
- ***H_60_P_90***
- ...
</details>
<details>
<summary><strong>Instance (Instance Segmentation Annotations)</strong></summary>
- ***H_35_P_45***
- *ClearNoon*
- Town01.tar.gz
- Town02.tar.gz
- ...
- Town10HD.tar.gz
</details>
<details>
<summary><strong>Segment (Semantic Segmentation Annotations)</strong></summary>
- ***H_15_P_0***
- *ClearNoon*
- Town01.tar.gz
- Town02.tar.gz
- ...
- Town10HD.tar.gz
- ***H_15_P_45***
- ...
- ...
- ***H_60_P_90***
</details>
<details>
<summary><strong>Depth (Depth Annotations)</strong></summary>
- ***H_35_P_45***
- *ClearNoon*
- Town01.tar.gz
- Town02.tar.gz
- ...
- Town10HD.tar.gz
</details>
-->
```
├── Images (RGB Images)
│ ├── H_15_P_0
│ │ ├── ClearNoon
│ │ │ ├── Town01
│ │ │ │ └── Town01.tar.gz
│ │ │ ├── Town02
│ │ │ │ └── Town02.tar.gz
│ │ │ ├── ...
│ │ │ └── Town10HD
│ │ │ └── Town10HD.tar.gz
│ │ ├── ClearSunset
│ │ │ ├── Town01
│ │ │ │ └── Town01.tar.gz
│ │ │ ├── Town02
│ │ │ │ └── Town02.tar.gz
│ │ │ ├── ...
│ │ │ └── Town10HD
│ │ │ └── Town10HD.tar.gz
│ │ ├── ClearNight
│ │ │ ├── Town01
│ │ │ │ └── Town01.tar.gz
│ │ │ ├── Town02
│ │ │ │ └── Town02.tar.gz
│ │ │ ├── ...
│ │ │ └── Town10HD
│ │ │ └── Town10HD.tar.gz
│ │ ├── CloudyNoon
│ │ │ ├── Town01
│ │ │ │ └── Town01.tar.gz
│ │ │ ├── Town02
│ │ │ │ └── Town02.tar.gz
│ │ │ ├── ...
│ │ │ └── Town10HD
│ │ │ └── Town10HD.tar.gz
│ │ └── MidRainyNoon
│ │ ├── Town01
│ │ │ └── Town01.tar.gz
│ │ ├── Town02
│ │ │ └── Town02.tar.gz
│ │ ├── ...
│ │ └── Town10HD
│ │ └── Town10HD.tar.gz
│ ├── H_15_P_45
│ │ └── ...
│ ├── ...
│ └── H_60_P_90
│ └── ...
├── Instance (Instance Segmentation Annotations)
│ ├── H_35_P_45
│ │ └── ClearNoon
│ │ ├── Town01
│ │ │ └── Town01.tar.gz
│ │ ├── Town02
│ │ │ └── Town02.tar.gz
│ │ ├── ...
│ │ └── Town10HD
│ │ └── Town10HD.tar.gz
│ └── ...
├── Segment (Semantic Segmentation Annotations)
│ ├── H_15_P_0
│ │ ├── ClearNoon
│ │ │ ├── Town01
│ │ │ │ └── Town01.tar.gz
│ │ │ ├── Town02
│ │ │ │ └── Town02.tar.gz
│ │ │ ├── ...
│ │ │ └── Town10HD
│ │ │ └── Town10HD.tar.gz
│ │ ├── H_15_P_45
│ │ │ └── ...
│ │ ├── ...
│ │ └── H_60_P_90
│ │ └── ...
│ └── ...
└── Depth (Depth Annotations)
├── H_35_P_45
│ └── ClearNoon
│ ├── Town01
│ │ └── Town01.tar.gz
│ ├── Town02
│ │ └── Town02.tar.gz
│ ├── ...
│ └── Town10HD
│ └── Town10HD.tar.gz
└── ...
```
**Note**: Since the same viewpoint is reproduced across each weather variation, hence ClearNoon annotations can be used for all images pertaining to the different weather variations.
## Dataset Download
The dataset can be downloaded using wget.
Since SkyScenes offers variations across different axes we enable different subsets for download that can aid in model sensitivity analysis across these axes.
### Download instructions: wget
**Example script for downloading different subsets of data using wget**
```bash
#!/bin/bash
#Change here to download a specific Height and Pitch Variation, for example - H_15_P_0
# HP=('H_15_P_45' 'H_15_P_60' 'H_15_P_90')
HP=('H_15_P_0' 'H_15_P_45' 'H_15_P_60' 'H_15_P_90' 'H_35_P_0' 'H_35_P_45' 'H_35_P_60' 'H_35_P_90' 'H_60_P_0' 'H_60_P_45' 'H_60_P_60' 'H_60_P_90')
#Change here to download a specific weather subset, for example - ClearNoon
#Note - For Segment, Instance and Depth annotations this field should only have ClearNoon variation
# weather=('ClearNoon' 'ClearNight')
weather=('ClearNoon' 'ClearNight' 'ClearSunset' 'CloudyNoon' 'MidRainyNoon')
#Change here to download a specific Town subset, for example - Town07
layout=('Town01' 'Town02' 'Town03' 'Town04' 'Town05' 'Town06' 'Town07' 'Town10HD')
#Change here for any specific annotation, for example - https://huggingface.co/datasets/hoffman-lab/SkyScenes/resolve/main/Segment
base_url=('https://huggingface.co/datasets/hoffman-lab/SkyScenes/resolve/main/Images')
#Change here for base download folder
base_download_folder='SkyScenes'
for hp in "${HP[@]}"; do
for w in "${weather[@]}"; do
for t in "${layout[@]}"; do
folder=$(echo "$base_url" | awk -F '/' '{print $(NF)}')
download_url="${base_url}/${hp}/${w}/${t}/${t}.tar.gz"
download_folder="${base_download_folder}/${folder}/${hp}/${w}/${t}"
mkdir -p "$download_folder"
echo "Downloading: $download_url"
wget -P "$download_folder" "$download_url"
done
done
done
```
<!-- ### Download instructions: [datasets](https://huggingface.co/docs/datasets/index)
<details>
<summary>Click to view all the available keys for downloading subsets of the data</summary>
* **Layout Variations**
- Rural
- Urban
* **Weather Variations**
- ClearNoon
- ClearNight (only images)
- ClearSunset (only images)
- CloudyNoon (only images)
- MidRainyNoon (only images)
* **Height Variations**
- H_15
- H_35
- H_60
* **Pitch Variations**
- P_0
- P_45
- P_60
- P_90
* **Height and Pitch Variations**
- H_15_P_0
- H_15_P_45
- H_15_P_60
- H_15_P_90
- H_35_P_0
- H_35_P_45
- H_35_P_60
- H_35_P_90
- H_60_P_0
- H_60_P_45
- H_60_P_60
- H_60_P_90
Full dataset key: full
**💡Notes**:
- To download **images** append subset key with **images**, example - ```H_35_P_45 images```
- To download **semantic segmentation** maps append subset key with **semseg**, example - ```H_35_P_45 semseg```
- To download **instance segmentation** maps append subset key with **instance**, example - ```H_35_P_45 instance```
- To download **depth** maps append subset key with **depth**, example - ```H_35_P_45 depth```
</details>
**Example script for loading H_35_P_45 images**
```python
from datasets import load_dataset
dataset = load_dataset('hoffman-lab/SkyScenes',name="H_35_P_45 images")
```
**Example script for loading H_35_P_45 semantic segmentation maps**
```python
from datasets import load_dataset
dataset = load_dataset('hoffman-lab/SkyScenes',name="H_35_P_45 semseg")
```
**Example script for loading H_35_P_45 instance segmentation maps**
```python
from datasets import load_dataset
dataset = load_dataset('hoffman-lab/SkyScenes',name="H_35_P_45 instance")
```
**Example script for loading H_35_P_45 depth maps**
```python
from datasets import load_dataset
dataset = load_dataset('hoffman-lab/SkyScenes',name="H_35_P_45 depth")
```
### 💡 Notes
- To prevent issues when loading datasets using [datasets](https://huggingface.co/docs/datasets/index) library, it is recommended to avoid downloading subsets that contain overlapping directories. If there are any overlapping directories between the existing downloads and new ones, it's essential to clear the .cache directory of any such overlaps before proceeding with the new downloads. This step will ensure a clean and conflict-free environment for handling datasets. -->
## BibTex
If you find this work useful please like ❤️ our dataset repo and cite 📄 our paper. Thanks for your support!
```
@misc{khose2023skyscenes,
title={SkyScenes: A Synthetic Dataset for Aerial Scene Understanding},
author={Sahil Khose and Anisha Pal and Aayushi Agarwal and Deepanshi and Judy Hoffman and Prithvijit Chattopadhyay},
year={2023},
eprint={2312.06719},
archivePrefix={arXiv},
primaryClass={cs.CV}
}
```