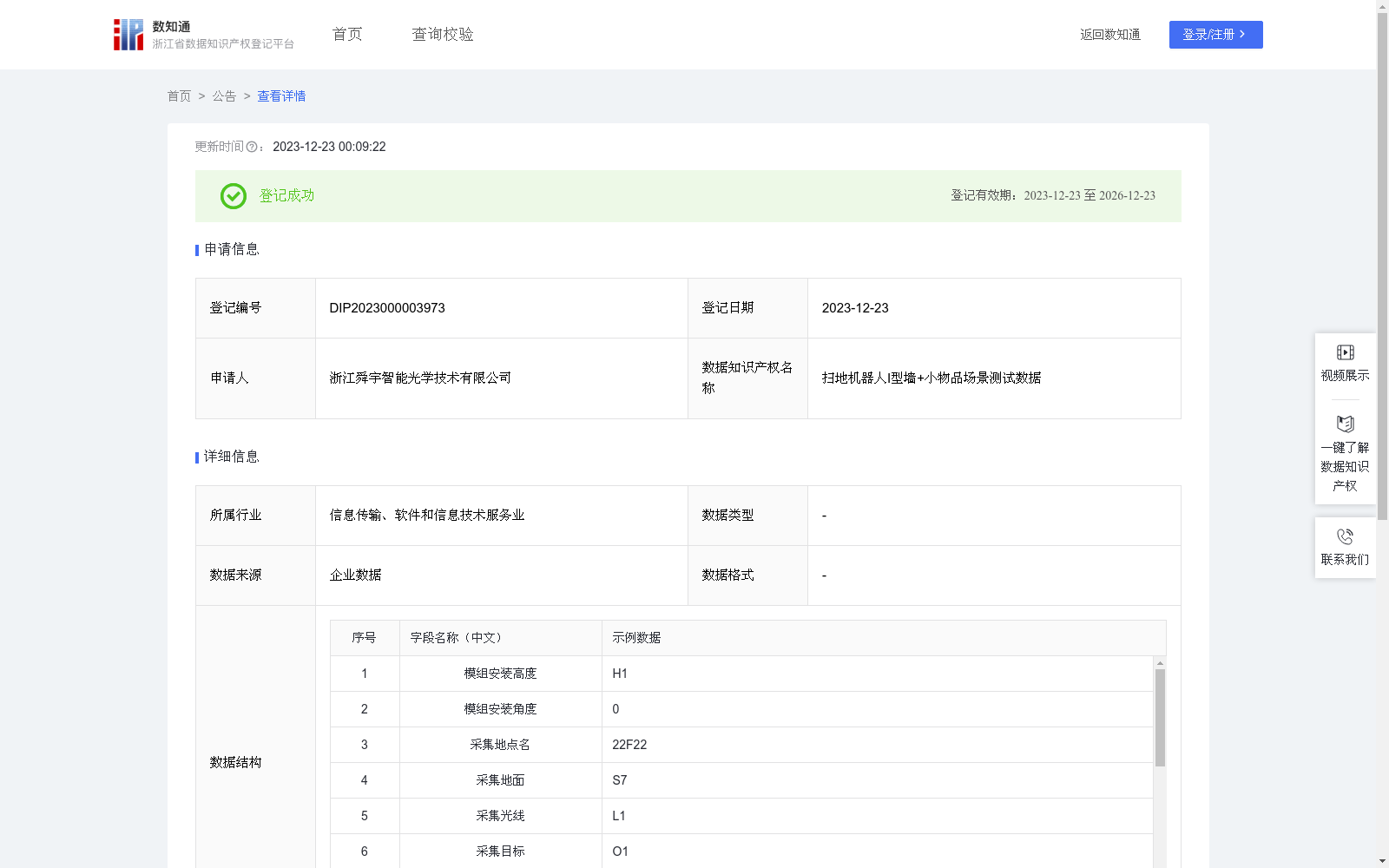
扫地机器人I型墙+小物品场景测试数据
收藏浙江省数据知识产权登记平台2023-12-23 更新2024-05-08 收录
下载链接:
https://www.zjip.org.cn/home/announce/trends/22259
下载链接
链接失效反馈官方服务:
资源简介:
扫地机器人在工作时时常会遇到一些特殊场景,比如I型墙场景且有小物品存在的场景,基于视觉的扫地机在此场景中获取的深度数据常有边界不清晰、无法识别细小物体等组合复杂问题,如何能在此场景中准确定位与避障是个难点也是重点,在此场景,扫地机深度视觉模组获取的深度数据的精度就显得十分重要。搭建扫地机真值系统,用真值相机和目标深度模组进行不同材质、光线、距离下I型墙+小物品场景的数据采集,获取I型墙+小物品场景的数据,并对数据进行处理得到校正后的数据用于目标深度模组的校正,提升深度模组在扫地机I型墙+小物品场景下的测量精度,以解决扫地机定位与避障问题。采扫地机器人真值系统采集不同材质、光线、距离下的I型墙+小物品场景的数据,包括原始深度相机数据、真值相机采集的点云数据;对原始深度相机数据进行系统误差去除;对真值相机采集的I型墙+小物品场景点云数据进行修复,通过平面拟合算法进行I型墙+小物品场景的墙面校正、再通过滤波算法对点云进行平滑去噪,得到修复后的真值相机点云;将修复后的真值相机点云与深度相机进行点云配准,得到校正后的I型墙+小物品场景的点云数据——校正后数据laser-x、laser-y、laser-z和校正后数据tof-x、tof-y、tof-z。
When working, sweeping robots frequently encounter special scenarios, such as Type-I wall scenarios with small objects. Visual-based sweeping robots often suffer from complex issues including unclear boundaries and failure to recognize small objects in the depth data collected in such scenarios. Achieving accurate positioning and obstacle avoidance in these scenarios is both a critical challenge and a research focus, making the accuracy of depth data acquired by the sweeping robot's depth vision module particularly important.
We established a sweeping robot ground-truth system, which uses a ground-truth camera and a target depth module to collect data under Type-I wall + small object scenarios with varying materials, lighting conditions and distances. The collected data from Type-I wall + small object scenarios was processed to generate calibrated data for correcting the target depth module, thereby improving the measurement accuracy of the depth module in Type-I wall + small object scenarios for sweeping robots, and solving the positioning and obstacle avoidance problems of sweeping robots.
The sweeping robot ground-truth system collects data of Type-I wall + small object scenarios under different materials, lighting conditions and distances, including raw depth camera data and point cloud data captured by the ground-truth camera. Systematic errors were removed from the raw depth camera data. The point cloud data of Type-I wall + small object scenarios collected by the ground-truth camera was repaired: first, the wall surface in the scenarios was calibrated via a plane fitting algorithm, followed by smoothing and denoising the point cloud through a filtering algorithm to obtain the repaired ground-truth camera point cloud. The repaired ground-truth camera point cloud was registered with the depth camera point cloud to obtain corrected point cloud data for Type-I wall + small object scenarios: corrected data laser-x, laser-y, laser-z and corrected data tof-x, tof-y, tof-z.
提供机构:
浙江舜宇智能光学技术有限公司
创建时间:
2023-11-13
搜集汇总
数据集介绍
特点
该数据集是扫地机器人在I型墙和小物品场景下的测试数据,包含1122条记录,用于提升机器人在复杂环境中的定位与避障能力。
以上内容由遇见数据集搜集并总结生成


