pack_toothbrush_Nov19-advantages
收藏Hugging Face2025-12-01 更新2025-12-02 收录
下载链接:
https://huggingface.co/datasets/villekuosmanen/pack_toothbrush_Nov19-advantages
下载链接
链接失效反馈官方服务:
资源简介:
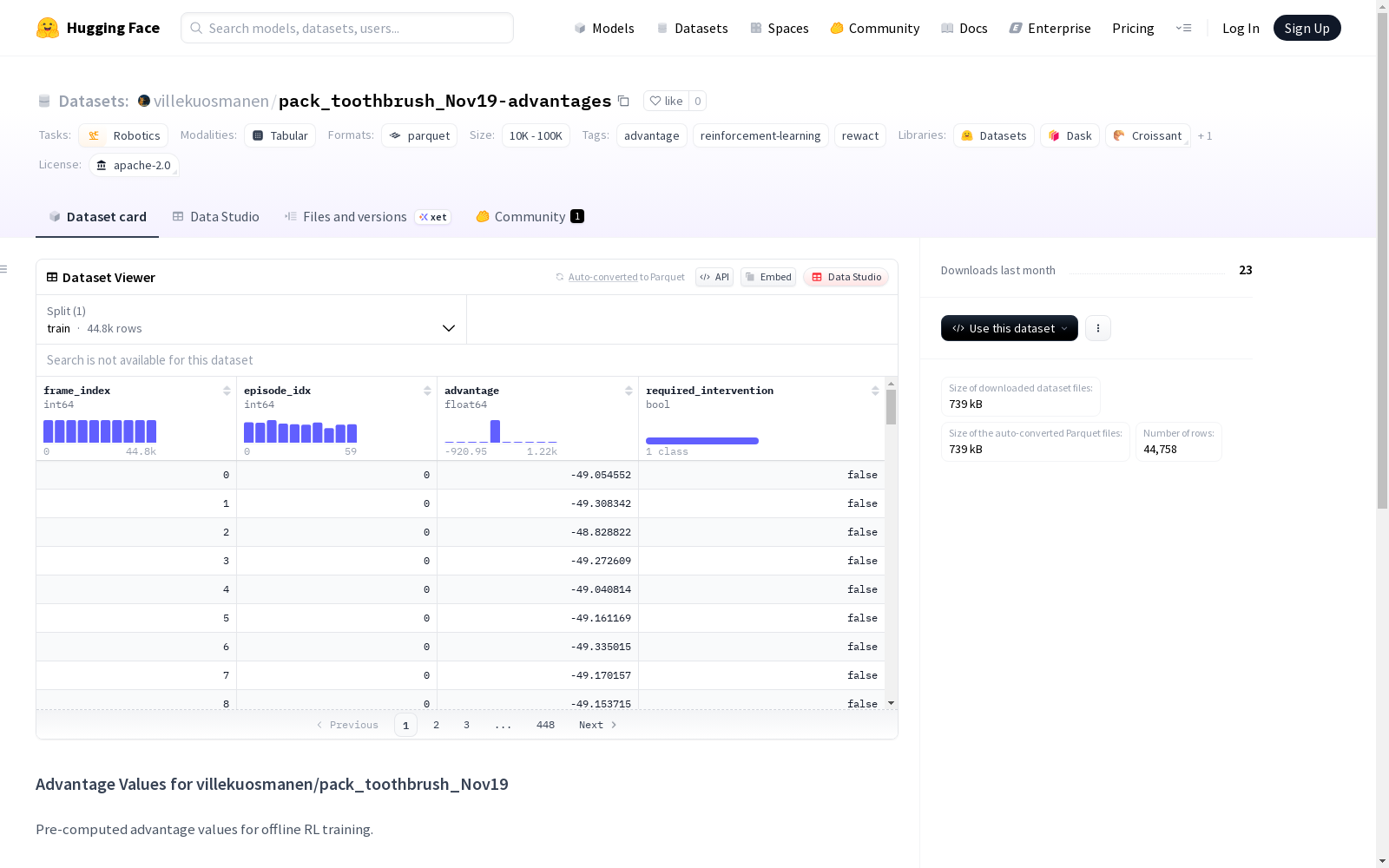
这是一个包含预计算优势值的数据集,用于离线强化学习训练。数据集来源于 villekuosmanen/pack_toothbrush_Nov19,使用 villekuosmanen/rewact_toothbrush_pistar_1.4.0 模型,并进行了50步的_n步查看来计算优势值。每个剧集的优势值被保存在一个parquet文件中,每个文件包含该剧集所有帧的优势值。
创建时间:
2025-11-28
原始信息汇总
数据集概述
基本信息
- 数据集名称: Advantage Values for villekuosmanen/pack_toothbrush_Nov19
- 许可证: apache-2.0
- 任务类别: 机器人学
- 标签: 优势函数、强化学习、rewact
核心描述
本数据集为离线强化学习训练提供了预计算的优势值。
数据来源
- 原始数据集: villekuosmanen/pack_toothbrush_Nov19
- 价值模型: villekuosmanen/rewact_toothbrush_pistar_1.4.0
- 前瞻步数: 50
文件内容
数据集包含按片段划分的Parquet文件,每个文件存储了对应片段中每一帧的优势值。
使用示例
python from pathlib import Path import pandas as pd
加载特定片段(例如 episode_00000)的优势值
advantage_df = pd.read_parquet("episode_00000.parquet")
搜集汇总
数据集介绍
构建方式
在机器人学领域,离线强化学习需要高质量的轨迹评估数据以优化策略。本数据集基于原始数据集villekuosmanen/pack_toothbrush_Nov19,通过预训练的价值模型villekuosmanen/rewact_toothbrush_pistar_1.4.0进行优势值计算。构建过程中采用50步前瞻的N步展望方法,对每个时间帧进行优势估计,最终生成按情节分组的Parquet文件,确保了评估值的连贯性与时序一致性。
特点
该数据集的核心特征在于其专注于优势值的预计算,为离线强化学习提供了即用的评估指标。优势值反映了每个动作相对于平均表现的优劣程度,能够有效指导策略改进。数据以分集Parquet文件形式存储,便于按需加载与处理,同时保持了与原始轨迹数据的对齐,支持高效的批量分析与模型训练。
使用方法
使用本数据集时,研究人员可通过Python环境轻松集成。利用pandas库读取特定情节的Parquet文件,即可获取对应帧的优势值数据。这些优势值可直接用于离线强化学习算法的训练,例如作为策略梯度或价值迭代的输入,加速模型收敛并提升性能,同时避免在线交互的计算开销。
背景与挑战
背景概述
在机器人学与强化学习领域,离线强化学习通过利用预先收集的经验数据来训练智能体,有效规避了在线交互的高成本与安全风险。pack_toothbrush_Nov19-advantages数据集作为villekuosmanen/pack_toothbrush_Nov19的衍生资源,由研究人员villekuosmanen于2023年前后构建,专注于牙刷包装任务中的优势值计算。该数据集基于rewact框架与π⋆价值模型,通过50步前瞻机制生成每帧的优势估计,旨在支持策略优化与价值函数学习,推动机器人操作任务中样本效率与稳定性的提升,对自动化包装等实际应用具有重要参考价值。
当前挑战
该数据集致力于解决机器人操作任务中离线强化学习的策略评估与优化挑战,核心问题在于如何从静态数据中准确估计动作优势,以指导策略改进而不依赖在线探索。构建过程中的挑战包括:优势值计算的稳定性受限于价值模型的泛化能力与前瞻步长的选择;数据来源于原始任务执行轨迹,其噪声与稀疏性可能影响优势估计的可靠性;此外,parquet格式的每帧数据处理需确保时序一致性与存储效率,以适应大规模离线训练的需求。
常用场景
经典使用场景
在机器人强化学习领域,离线强化学习(Offline RL)旨在利用预先收集的静态数据集进行策略优化,而无需与环境实时交互。该数据集通过提供预计算的advantage值,为机器人操作任务如牙刷包装提供了经典的使用场景。研究人员可直接将这些优势值应用于策略评估与改进,显著简化了价值函数估计的复杂流程,使得在模拟或真实机器人环境中训练高效策略成为可能,尤其适用于数据收集成本高昂或安全敏感的机器人应用。
解决学术问题
该数据集解决了离线强化学习中价值函数估计不准确与样本效率低下的核心学术问题。通过预计算advantage值,它减少了训练过程中对大量在线交互的依赖,有助于缓解分布偏移与过估计偏差。其意义在于为机器人操作任务提供了可靠的基准数据,推动了基于优势的离线RL算法发展,如保守策略优化与不确定性建模,从而提升了策略在稀疏奖励环境中的稳定性和泛化能力,对机器人自主技能学习研究产生了深远影响。
衍生相关工作
该数据集衍生了多项经典研究工作,主要集中在离线强化学习与机器人操作的交汇领域。例如,基于advantage加权的方法如Advantage-Weighted Actor-Critic(AWAC)被广泛应用于策略提取,以改善行为克隆的局限性。同时,它促进了rewact等框架的发展,用于结合预训练价值模型与策略优化。这些工作推动了机器人任务中离线RL的理论进展,并为后续数据集如D4RL或RoboNet提供了数据增强与评估基准的灵感。
以上内容由遇见数据集搜集并总结生成


