MUN-FRL
收藏arXiv2023-10-12 更新2024-06-21 收录
下载链接:
https://mun-frl-vil-dataset.readthedocs.io/en/latest/
下载链接
链接失效反馈官方服务:
资源简介:
MUN-FRL数据集是由纪念大学纽芬兰分校和国家研究委员会加拿大飞行研究实验室合作创建的,旨在支持无人机和全尺寸直升机在无全球导航卫星系统(GNSS)环境下的自主导航和地图构建研究。该数据集包含从300米到5公里的飞行距离,使用DJI M600六旋翼无人机和NRC Bell 412 ASRA飞机收集。数据集内容包括硬件同步的单目图像、IMU测量、3D LiDAR点云和高精度实时动态(RTK)-GNSS基准真相。数据集适用于开发视觉惯性LiDAR里程计和地图构建算法,视觉惯性导航算法,目标检测,分割和着陆区检测算法。
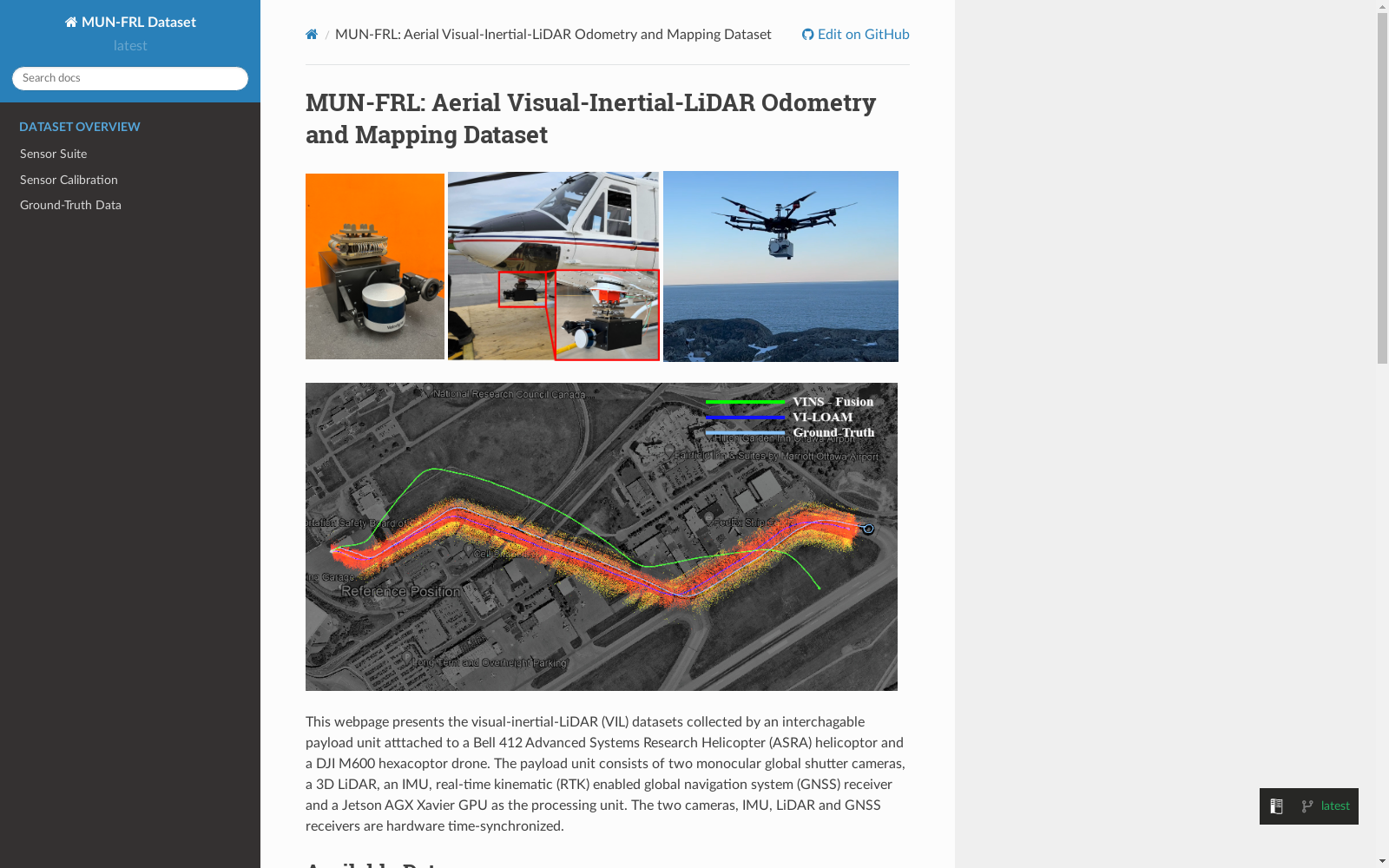
The MUN-FRL dataset was collaboratively developed by Memorial University of Newfoundland and the National Research Council Canada (NRC) Flight Research Laboratory, aiming to support research on autonomous navigation and mapping for unmanned aerial vehicles (UAVs) and full-scale helicopters in Global Navigation Satellite System (GNSS)-denied environments. This dataset covers flight distances ranging from 300 meters to 5 kilometers, and was collected using a DJI M600 hexacopter UAV and an NRC Bell 412 ASRA aircraft. The dataset includes hardware-synchronized monocular images, IMU measurements, 3D LiDAR point clouds, and high-precision Real-Time Kinematic (RTK)-GNSS ground truth. It is applicable for developing visual-inertial LiDAR odometry and mapping algorithms, visual-inertial navigation algorithms, as well as object detection, segmentation, and landing zone detection algorithms.
提供机构:
纪念大学纽芬兰分校
创建时间:
2023-10-12
搜集汇总
数据集介绍
构建方式
MUN-FRL数据集通过多传感器负载单元在DJI M600六旋翼无人机和NRC Bell 412高级系统研究飞机(ASRA)上采集数据构建而成。该数据集包括硬件同步的单目图像、IMU测量、3D LiDAR点云和高精度RTK-GNSS基准真相。数据采集在户外环境中进行,涵盖城市、高速公路、山坡、草原和水域等多种场景,总飞行时间超过100分钟。数据集的构建旨在促进视觉-惯性-LiDAR里程计和建图算法、视觉-惯性导航算法以及基于真实无人机和直升机数据的物体检测、分割和着陆区检测算法的发展。
特点
MUN-FRL数据集的主要特点包括:1) 多传感器硬件同步,确保数据的时间一致性;2) 高精度RTK-GNSS基准真相,提供可靠的性能评估;3) 涵盖多种户外环境,模拟真实应用场景;4) 提供传感器内参和外参校准参数,便于算法开发和验证;5) 包含飞行平台传感器降解特性,如实反映实际飞行中的振动、飞行高度等因素。
使用方法
MUN-FRL数据集适用于开发和验证视觉-惯性-LiDAR导航和建图算法。用户可以通过ROS包文件访问原始传感器数据和同步后的数据,利用提供的校准参数进行传感器融合算法的开发。数据集还提供了基准真相数据,便于算法性能的评估。此外,数据集的开源特性使得研究人员可以自由访问和使用,促进相关领域的研究进展。
背景与挑战
背景概述
MUN-FRL数据集是由Memorial University of Newfoundland的Intelligence Systems Lab与National Research Council of Canada的Flight Research Lab合作创建的,旨在推动全球导航卫星系统(GNSS)被拒绝环境下的导航研究。该数据集于2022年发布,主要研究人员包括Ravindu G. Thalagala、Sahan M. Gunawardena等。其核心研究问题是如何在GNSS信号不可用的情况下,利用视觉、惯性和LiDAR传感器实现空中自主导航和地图构建。该数据集对无人机和全尺寸直升机在城市、高速公路、山坡、草原和水域等多种环境中的飞行数据进行了收集,对开发视觉-惯性-LiDAR里程计和地图构建算法、视觉-惯性导航算法以及基于真实世界无人机和直升机数据的物体检测、分割和着陆区检测算法具有重要影响。
当前挑战
MUN-FRL数据集面临的挑战主要包括:1) 解决GNSS被拒绝环境下的导航问题,这需要高度依赖视觉、惯性和LiDAR传感器的融合技术;2) 数据集构建过程中遇到的挑战,如传感器硬件同步、数据时间戳校准、传感器内外参数校准等。此外,数据集还需要处理飞行平台在不同环境中的传感器退化问题,如振动、飞行高度变化和传感器可用性变化等。这些挑战使得MUN-FRL数据集成为评估和开发视觉-惯性-LiDAR导航算法的重要基准。
常用场景
经典使用场景
MUN-FRL数据集在无人机和全尺寸直升机上捕获的多传感器数据,为全球导航卫星系统(GNSS)被拒绝环境下的导航研究提供了独特的资源。该数据集的经典使用场景包括开发视觉惯性激光雷达里程计和建图算法、视觉惯性导航算法、目标检测和分割算法,以及基于真实无人机和全尺寸直升机数据的着陆区检测算法。
实际应用
MUN-FRL数据集在实际应用中主要用于无人机和全尺寸直升机的自主导航和货物配送。通过模拟最后一英里货物配送的场景,数据集提供了长达5公里的飞行轨迹,涵盖城市、高速公路、山坡、草原和水域等多种环境。这为开发和测试适用于实际操作的导航和避障算法提供了宝贵的资源。
衍生相关工作
MUN-FRL数据集的发布催生了一系列相关研究工作,特别是在视觉惯性激光雷达(VIL)导航算法的发展方面。例如,基于该数据集的研究已经推动了VINS-Fusion、A-LOAM和VI-LOAM等先进算法的性能评估和改进。此外,该数据集还为开发适用于全尺寸平台的VIL算法提供了新的挑战和机遇。
以上内容由遇见数据集搜集并总结生成


