Stevens-VLP16-Dataset
收藏github2024-05-22 更新2024-05-31 收录
下载链接:
https://github.com/TixiaoShan/Stevens-VLP16-Dataset
下载链接
链接失效反馈官方服务:
资源简介:
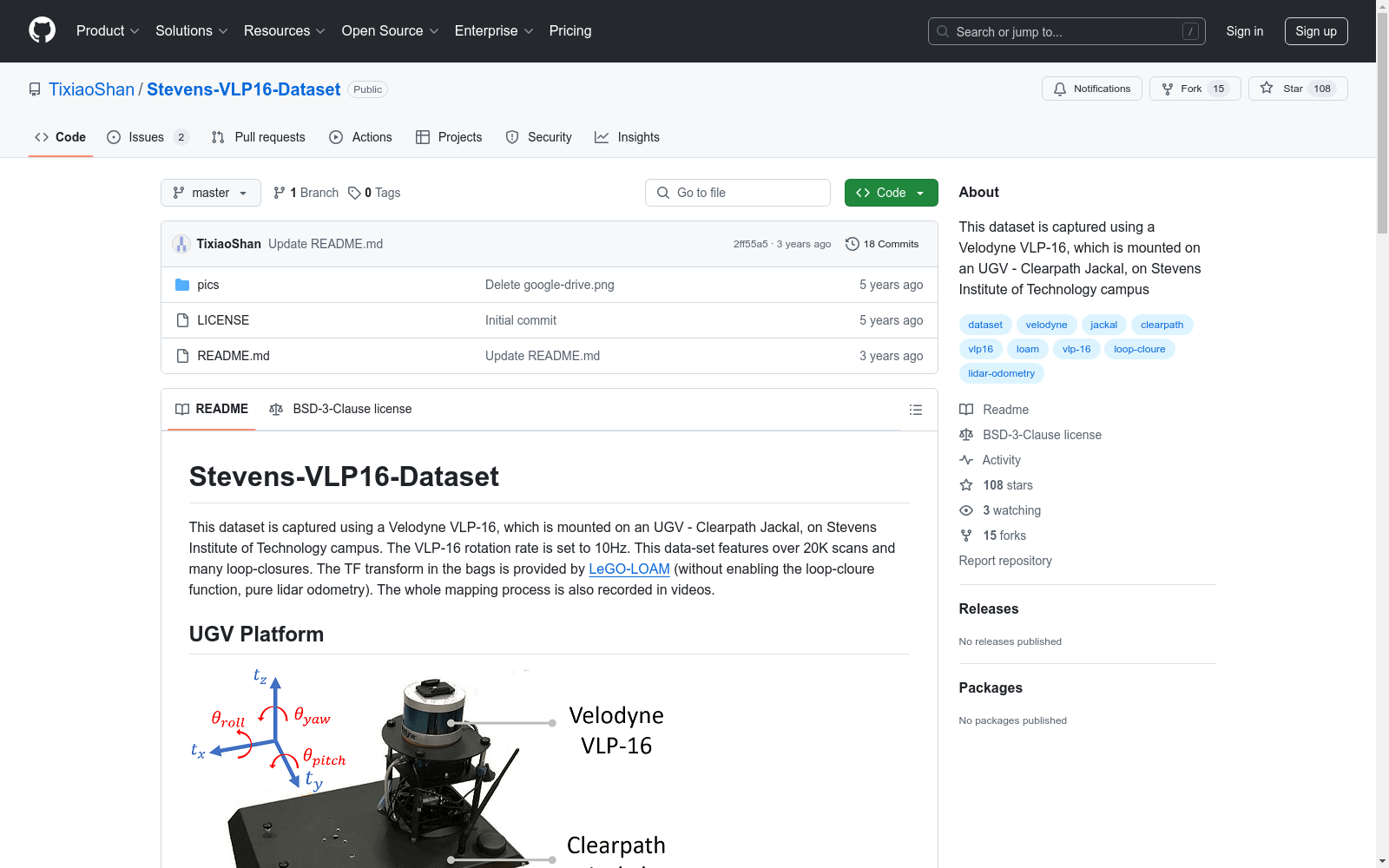
该数据集使用安装在Stevens Institute of Technology校园内的UGV - Clearpath Jackal上的Velodyne VLP-16捕获。VLP-16的旋转速率为10Hz,包含超过20,000次扫描和多个闭环。数据集中的TF变换由LeGO-LOAM提供,整个映射过程也被记录在视频中。
本数据集以Stevens Institute of Technology校园内部署的UGV - Clearpath Jackal平台为载体,利用Velodyne VLP-16激光扫描仪进行数据采集。VLP-16的扫描频率达到10Hz,累积扫描次数超过20,000次,并实现了多个闭环扫描。数据集内包含的TF变换信息由LeGO-LOAM算法提供,整个三维映射过程亦同步录制于视频资料之中。
创建时间:
2019-03-15
原始信息汇总
数据集概述
数据集名称
- Stevens-VLP16-Dataset
数据采集设备
- Velodyne VLP-16
安装平台
- UGV - Clearpath Jackal
采集地点
- Stevens Institute of Technology campus
数据集特征
- 包含超过20,000次扫描
- 包含多个回环闭合
数据处理
- 使用LeGO-LOAM进行TF变换(未启用回环闭合功能)
数据集内容
- /tf:不用于LeGO-LOAM测试
- /imu/data:与VLP-16未对齐,仅提供初始变换猜测,不必要用于LeGO-LOAM运行
- /velodyne_points
引用信息
- 若使用此数据集,请引用以下文献:
-
文献1:
@inproceedings{traversability2018, title={Bayesian Generalized Kernel Inference for Terrain Traversability Mapping}, author={Shan, Tixiao and Wang, Jinkun and Englot, Brendan and Doherty, Kevin}, booktitle={In Proceedings of the 2nd Annual Conference on Robot Learning}, year={2018} }
-
文献2:
@inproceedings{legoloam2018, title={LeGO-LOAM: Lightweight and Ground-Optimized Lidar Odometry and Mapping on Variable Terrain}, author={Shan, Tixiao and Englot, Brendan}, booktitle={IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)}, pages={4758-4765}, year={2018}, organization={IEEE} }
-
搜集汇总
数据集介绍
构建方式
Stevens-VLP16-Dataset 数据集是通过在Stevens Institute of Technology校园内,使用Velodyne VLP-16激光雷达设备,安装在Clearpath Jackal无人地面车辆(UGV)上进行数据采集的。该激光雷达的旋转频率设定为10Hz,确保了高频率的数据扫描。数据集包含了超过20,000次的扫描,并记录了多次回环闭合。TF变换信息由LeGO-LOAM算法提供,未启用回环闭合功能,仅使用纯激光雷达里程计。整个地图构建过程被视频记录下来,以供进一步分析和验证。
特点
该数据集的主要特点在于其高频率的激光雷达扫描和丰富的回环闭合数据,这为研究激光雷达里程计和地图构建提供了宝贵的资源。此外,数据集中的TF变换信息由LeGO-LOAM算法提供,确保了数据的高精度。数据集还包含了未与VLP-16对齐的IMU数据,仅作为初始变换的猜测,这对于某些应用场景可能具有参考价值。
使用方法
使用Stevens-VLP16-Dataset数据集时,用户可以通过下载链接获取原始数据包,并使用支持ROS的工具进行数据解析和处理。特别地,数据集中的/velodyne_points主题包含了激光雷达的原始点云数据,是进行激光雷达里程计和地图构建研究的核心数据。此外,/tf主题提供了由LeGO-LOAM算法生成的变换信息,而/imu/data主题则提供了IMU的初始变换猜测,尽管其未与激光雷达数据对齐。用户应根据具体研究需求选择合适的数据主题进行分析和应用。
背景与挑战
背景概述
Stevens-VLP16-Dataset是由Stevens Institute of Technology的研究团队使用Velodyne VLP-16激光雷达在校园内采集的数据集。该数据集主要用于研究无人地面车辆(UGV)的导航与地图构建,特别是在复杂地形中的应用。数据集包含了超过20,000次的扫描数据,并记录了多次闭环检测。该数据集的创建时间为2018年,主要研究人员包括Tixiao Shan、Jinkun Wang、Brendan Englot和Kevin Doherty。其核心研究问题是如何在变地形条件下实现轻量级且优化的激光雷达里程计与地图构建。该数据集对无人车辆导航与地图构建领域具有重要影响,特别是在提升算法性能与鲁棒性方面。
当前挑战
Stevens-VLP16-Dataset在构建过程中面临的主要挑战包括:首先,激光雷达数据与IMU数据的时间同步问题,尽管IMU数据提供了初始变换猜测,但其与VLP-16数据并未完全对齐,这增加了数据处理的复杂性。其次,数据集中的TF变换由LeGO-LOAM算法提供,但未启用闭环检测功能,这可能导致里程计的漂移问题。此外,数据集在不同地形条件下的适用性也是一个挑战,特别是在复杂地形中,如何确保地图构建的准确性与鲁棒性。这些挑战不仅影响了数据集的实际应用效果,也对后续研究提出了更高的要求。
常用场景
经典使用场景
在无人地面车辆(UGV)领域,Stevens-VLP16-Dataset 数据集的经典使用场景主要集中在激光雷达(LiDAR)的定位与地图构建(SLAM)研究中。该数据集通过在Stevens Institute of Technology校园内采集的超过20,000次扫描数据,为研究人员提供了丰富的环境信息和多次闭环检测的机会。这些数据特别适用于开发和验证基于激光雷达的轻量级和地面优化的定位与地图构建算法,如LeGO-LOAM,从而在复杂地形中实现精确的自主导航。
实际应用
在实际应用中,Stevens-VLP16-Dataset 数据集为无人地面车辆(UGV)的自主导航和环境感知提供了重要的支持。通过利用该数据集,工程师和开发者能够训练和优化激光雷达的定位与地图构建算法,从而在各种复杂地形中实现高效的自主导航。例如,在农业、采矿和灾害响应等领域,UGV可以利用这些算法进行精确的路径规划和环境监测,提高作业效率和安全性。
衍生相关工作
Stevens-VLP16-Dataset 数据集的发布催生了一系列相关的经典工作,特别是在激光雷达的定位与地图构建(SLAM)领域。例如,LeGO-LOAM算法就是基于该数据集开发的一种轻量级和地面优化的激光雷达定位与地图构建方法,显著提升了在复杂地形中的导航性能。此外,该数据集还促进了其他基于激光雷达的SLAM算法的研究和改进,推动了无人地面车辆(UGV)技术的发展。
以上内容由遇见数据集搜集并总结生成


