Open MARS Dataset
收藏arXiv2024-06-14 更新2024-06-21 收录
下载链接:
https://ai4ce.github.io/MARS/
下载链接
链接失效反馈官方服务:
资源简介:
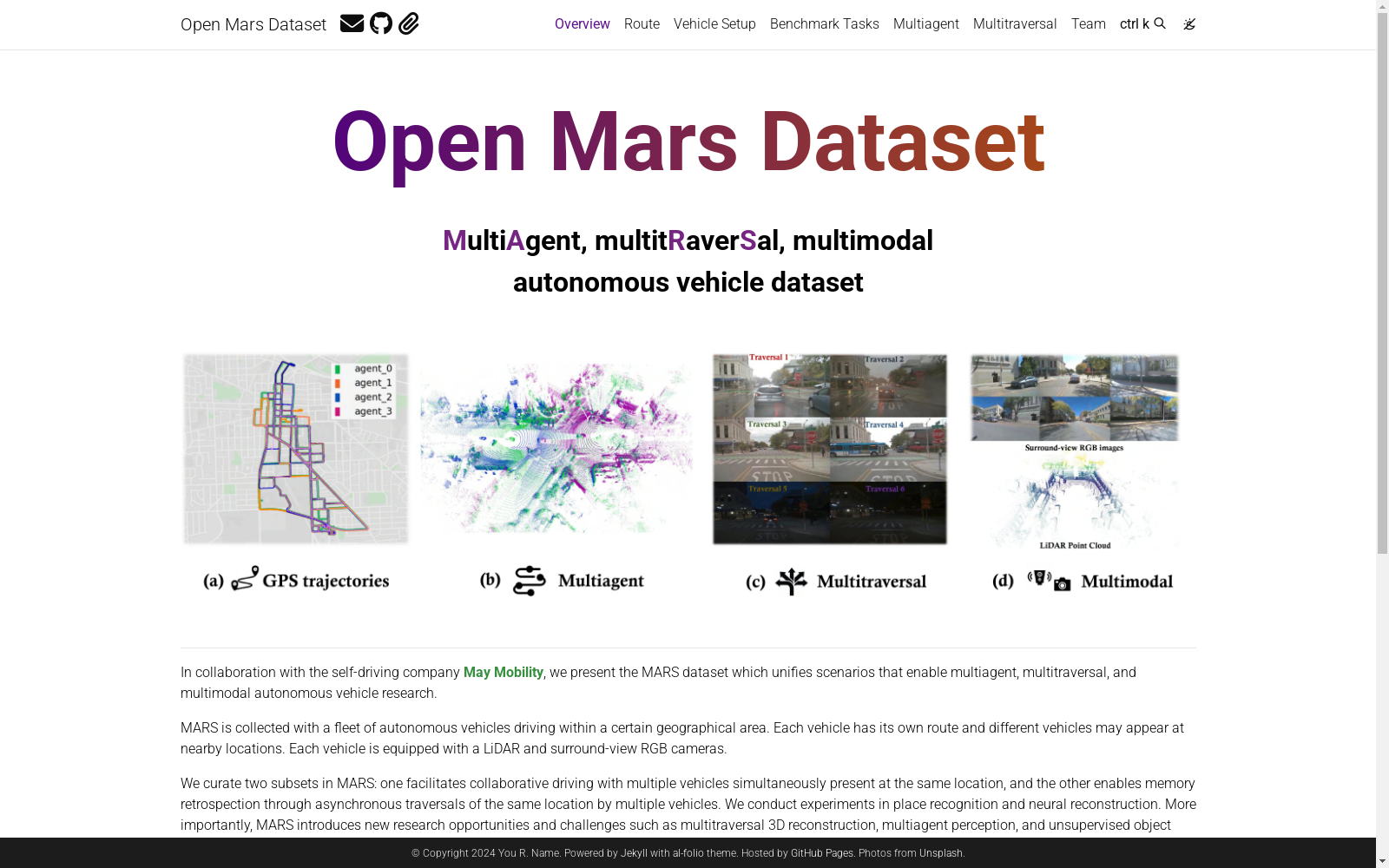
Open MARS Dataset是由纽约大学与自动驾驶公司May Mobility合作创建的大型多模态数据集,专注于多代理、多遍历和多模式的自动驾驶研究。该数据集包含来自多次遍历的传感器数据,如GPS轨迹、LiDAR点云和环绕视图RGB图像,覆盖了多种天气和光照条件下的同一地理位置。数据收集过程中,使用了装备有多种传感器的自动驾驶车辆,在特定地理区域内进行多次遍历,以捕捉不同条件下的环境信息。Open MARS Dataset的应用领域包括自动驾驶车辆的感知、预测和规划能力的提升,以及多代理协作感知和学习等新兴研究挑战。
The Open MARS Dataset is a large-scale multimodal dataset co-developed by New York University and autonomous driving firm May Mobility, focusing on autonomous driving research covering multi-agent scenarios, multi-pass traversals and multimodal domains. This dataset includes sensor data from multiple traversals, such as GPS trajectories, LiDAR point clouds and surround-view RGB images, covering the same geographical location under diverse weather and lighting conditions. During the data collection process, autonomous vehicles equipped with various sensors were used to conduct multiple traversals within a specific geographical area, capturing environmental information under different conditions. The application fields of the Open MARS Dataset include improving the perception, prediction and planning capabilities of autonomous vehicles, as well as tackling emerging research challenges like multi-agent collaborative perception and learning.
提供机构:
纽约大学
创建时间:
2024-06-14
搜集汇总
数据集介绍
构建方式
Open MARS 数据集通过与自动驾驶公司 May Mobility 合作构建,旨在填补现有自动驾驶数据集中多智能体交互和重复遍历同一地点的空白。数据采集过程中,四辆自动驾驶车辆在特定地理区域内行驶,每辆车配备了 LiDAR 和 360 度全景 RGB 摄像头。数据集包含两个子集:一个用于多车辆在同一地点的协同驾驶研究,另一个用于通过多车辆异步遍历同一地点进行记忆回溯研究。数据采集覆盖了不同的光照、天气和交通条件,确保了数据的多样性和丰富性。
使用方法
Open MARS 数据集的使用方法主要围绕多智能体协同感知、多遍历记忆回溯和多模态感知展开。研究人员可以利用数据集中的多车辆协同驾驶数据,研究车辆之间的协同感知和规划算法;通过多遍历数据,探索自动驾驶车辆如何利用历史视觉记忆提升环境感知能力;结合 LiDAR 和全景摄像头数据,开发多模态感知算法,提升自动驾驶系统对复杂环境的理解能力。此外,数据集还可用于神经重建、视觉定位等任务,为自动驾驶研究提供了丰富的实验平台。
背景与挑战
背景概述
Open MARS数据集由纽约大学的研究团队于2024年推出,旨在推动多智能体、多遍历和多模态自动驾驶研究。该数据集通过与自动驾驶公司May Mobility合作,收集了多辆自动驾驶车辆在同一地理区域内的行驶数据,涵盖了GPS轨迹、LiDAR点云和全景RGB图像等多种传感器数据。Open MARS的独特之处在于其多智能体协作和多遍历特性,能够支持车辆在同一地点的多次遍历,从而增强自动驾驶系统的感知、预测和规划能力。该数据集的推出填补了现有自动驾驶数据集中缺乏多智能体交互和重复遍历的空白,为自动驾驶研究提供了新的研究方向和应用场景。
当前挑战
Open MARS数据集在解决自动驾驶领域的多智能体协作和多遍历感知问题时面临诸多挑战。首先,多智能体协作要求车辆在同一时间和空间内进行协同感知,这涉及到复杂的通信和数据融合问题,尤其是在动态交通环境中。其次,多遍历感知需要处理同一地点在不同时间、光照和天气条件下的数据变化,这对算法的鲁棒性和适应性提出了更高要求。此外,数据集的构建过程中,如何确保多辆车辆在同一区域的同步数据采集、传感器数据的精确校准以及大规模数据的高效存储与管理,都是技术上的难点。这些挑战不仅影响了数据集的构建质量,也对后续的算法开发和模型训练提出了更高的要求。
常用场景
经典使用场景
Open MARS数据集在自动驾驶研究领域中被广泛用于多智能体协同感知和多模态场景理解。其经典使用场景包括多车辆在同一地理区域的协同驾驶,以及同一地点在不同时间、不同条件下的多次遍历。这些场景为研究者提供了丰富的多视角数据,支持多智能体系统的协同感知、预测与规划研究,同时也为基于记忆的感知与学习提供了数据基础。
解决学术问题
Open MARS数据集解决了自动驾驶研究中多智能体协同感知和多遍历场景理解的难题。传统数据集通常基于单一车辆的单一遍历,缺乏多智能体交互和多次遍历的多样性。MARS通过提供多车辆协同驾驶和多次遍历的数据,填补了这一空白,推动了多智能体感知、多遍历3D重建、无监督目标发现等新兴研究方向的发展,显著提升了自动驾驶系统的感知与规划能力。
实际应用
在实际应用中,Open MARS数据集为自动驾驶车辆的协同驾驶和场景记忆提供了重要支持。通过多车辆的协同感知,自动驾驶系统能够在复杂交通环境中实现更安全的驾驶决策。同时,多次遍历的数据使得车辆能够在不同光照、天气条件下进行场景记忆与重建,提升了自动驾驶系统在动态环境中的适应性和鲁棒性。
数据集最近研究
最新研究方向
Open MARS Dataset 作为多智能体、多遍历和多模态自动驾驶研究的前沿数据集,近年来在自动驾驶领域引起了广泛关注。该数据集通过多辆自动驾驶车辆在同一地理区域内的协同操作,提供了丰富的多智能体交互和多遍历场景数据,填补了传统单车辆、单次遍历数据集的空白。其多模态传感器配置(包括LiDAR和全景RGB相机)为跨模态感知与学习提供了坚实基础。当前研究热点集中在多智能体协同感知、多遍历3D重建以及无监督物体发现等方向。特别是,多遍历数据为场景记忆和动态环境理解提供了新的研究机会,推动了自动驾驶系统在复杂环境下的感知与规划能力。此外,Open MARS Dataset 还为神经辐射场(NeRF)技术在自动驾驶场景中的应用提供了丰富的数据支持,促进了高保真神经模拟器和环境重建技术的发展。
相关研究论文
- 1Multiagent Multitraversal Multimodal Self-Driving: Open MARS Dataset纽约大学 · 2024年
以上内容由遇见数据集搜集并总结生成


