PhyBlock
收藏arXiv2025-06-10 更新2025-06-12 收录
下载链接:
https://phyblock.github.io/
下载链接
链接失效反馈官方服务:
资源简介:
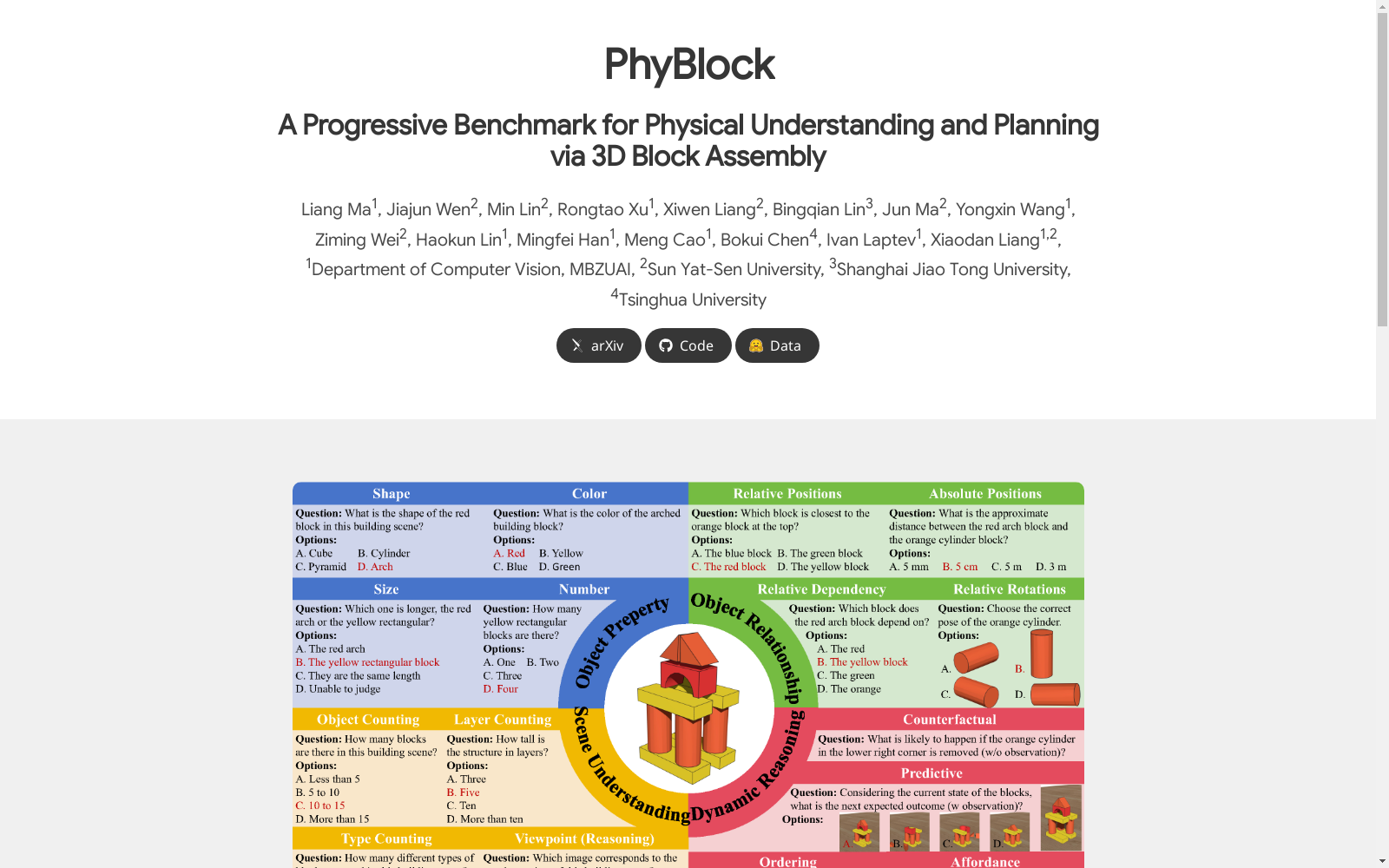
PhyBlock是一个用于评估视觉语言模型在物理理解和规划能力方面的基准数据集。该数据集由两部分组成:层级组装规划和物理理解视觉问答。层级组装规划包括400个组装任务,而物理理解视觉问答则包含2200个经过精心策划的问题。数据集通过一个物理引擎构建,确保场景的物理精确性和可行性。数据集旨在评估模型在空间推理和基本物理概念理解方面的能力,包括对象属性、空间关系和整体场景理解。
PhyBlock is a benchmark dataset for evaluating the physical understanding and planning capabilities of vision-language models. This dataset comprises two components: hierarchical assembly planning and physical understanding visual question answering. The hierarchical assembly planning section includes 400 assembly tasks, while the physical understanding visual question answering part contains 2200 meticulously curated questions. The dataset is built upon a physics engine to guarantee the physical accuracy and feasibility of all scenarios. Its primary objective is to assess models' abilities in spatial reasoning and comprehension of fundamental physical concepts, including object attributes, spatial relationships, and overall scene understanding.
提供机构:
莫哈梅德·本·扎耶德人工智能大学、中山大学、上海交通大学、清华大学
创建时间:
2025-06-10
原始信息汇总
PhyBlock: A Progressive Benchmark for Physical Understanding and Planning via 3D Block Assembly
数据集概述
- 名称: PhyBlock
- 类型: 3D块组装任务与视觉问答(VQA)样本结合的渐进式基准测试
- 目的: 评估大型视觉语言模型(LVLMs)在物理理解和规划方面的能力
数据集内容
- 任务数量: 2200个块任务
- 组装任务: 400个
- VQA任务: 1800个
- 评估维度:
- 部分完成度
- 故障诊断
- 规划鲁棒性
关键特征
- 认知层次: 包含四个渐进级别的认知层次组装任务
- 评估重点:
- 渐进式空间推理
- 基础物理理解(物体属性、空间关系、整体场景理解)
基准测试结果
- 测试模型: 25个最先进的LVLMs
- 最佳表现模型: F值=47.36%
- 主要发现:
- 模型在任务复杂度增加时表现显著下降
- 空间定向和依赖关系推理存在持续困难
- 思维链提示改进效果有限
相关资源
- 论文: PhyBlock: A Progressive Benchmark for Physical Understanding and Planning via 3D Block Assembly
- arXiv编号: 2506.08708
- 研究领域: cs.RO
搜集汇总
数据集介绍
构建方式
PhyBlock数据集的构建依托于高保真物理仿真环境,采用模块化设计理念系统性地创建了3D积木场景。研究团队基于Genesis物理引擎开发了参数化积木资产库,涵盖8种几何形状和5种高对比度色彩,并采用布尔运算和法线贴图技术确保几何精度。通过四阶段分层构建流程:首先收集现实世界积木结构作为参考,随后人工标注2600个场景的空间位姿与拓扑关系,继而运用组合变换进行数据增强,最终在6种环境背景下进行多视角渲染。特别地,通过活动顶点网络(AOV)对积木间非马尔可夫依赖关系进行建模,并采用三阶段人工验证流程确保VQA样本的物理合理性和语义准确性。
使用方法
使用PhyBlock需通过标准化接口加载场景配置和VQA任务。对于装配规划任务,模型需解析目标图像和候选积木集,生成符合AOV约束的装配序列,系统将根据步骤匹配度计算TP/FP/FN指标。物理VQA任务采用多选题形式评估,需结合场景图像回答涵盖静态感知和动态推理的问题。研究者可选择两种评估模式:严格模式要求精确的欧拉角匹配,适用于几何推理能力测评;宽松模式忽略位姿差异,专注结构规划能力分析。数据集支持单次全局规划和逐步交互式规划两种推理范式,并附带错误类型诊断工具(欧拉误差、依赖违反等),便于针对性模型改进。
背景与挑战
背景概述
PhyBlock是由Mohamed bin Zayed人工智能大学、中山大学、上海交通大学和清华大学的研究团队于2025年提出的一个渐进式基准测试数据集,旨在评估视觉语言模型(VLMs)在机器人3D积木组装任务中的物理理解和规划能力。该数据集包含2600个任务(400个组装任务和2200个视觉问答任务),通过四个认知层次的任务设计,系统评估模型在物体属性、空间关系和整体场景理解等方面的能力。PhyBlock的推出填补了现有基准测试在长时程规划和物理交互假设方面的不足,为具身智能领域的研究提供了重要的评估工具。
当前挑战
PhyBlock面临的挑战主要体现在两个方面:领域问题方面,该数据集需要解决复杂3D环境中的物理现象理解难题,包括物体稳定性判断、空间依赖关系推理以及多步骤规划等,这些任务对现有VLMs的空间推理和物理直觉提出了严峻考验;构建过程方面,研究团队需要克服3D场景的物理精确建模、多层次任务难度的系统设计,以及大规模高质量VQA样本的生成与验证等挑战,特别是要确保组装任务的物理合理性和评估指标的全面性。
常用场景
经典使用场景
PhyBlock数据集在视觉语言模型(VLMs)的物理理解和规划能力评估中扮演着关键角色。通过3D积木组装任务,该数据集系统地测试模型在空间推理、物体稳定性判断以及多步骤规划方面的表现。数据集包含四个难度层级,从基础感知到高级空间规划,逐步挑战模型处理复杂物理约束的能力。其独特的Activity-on-Vertex(AOV)网络表示法,能够精确捕捉积木间的拓扑依赖关系,为模型性能评估提供细粒度分析框架。
解决学术问题
PhyBlock解决了当前多模态推理研究中的两个核心问题:一是缺乏对物理世界动态约束的系统性评估标准,现有基准多关注单步感知而忽略长程规划;二是突破了传统数据集对理想化物理假设的依赖,通过高保真物理模拟器构建真实交互场景。该数据集首次将物体属性认知(如形状、颜色)、空间关系推理(如支撑结构)与多步骤动作规划统一于三维组装任务,为衡量模型是否内化物理先验知识提供了严谨标尺。
实际应用
在机器人操作领域,PhyBlock可直接应用于装配任务规划系统的开发。工业场景中的零件组装、物流分拣等任务需要类似的空间推理能力,数据集验证的物理理解模块可迁移至机械臂控制管道。教育科技领域则可基于其层级化任务设计开发儿童空间认知训练工具。更广泛地,任何需要结合视觉输入与物理常识决策的增强现实(AR)或虚拟现实(VR)交互系统,均可受益于在此数据集上优化的模型。
数据集最近研究
最新研究方向
PhyBlock数据集的推出标志着视觉语言模型(VLMs)在物理理解和规划能力评估方面迈出了重要一步。该数据集通过构建渐进式的3D积木组装任务,系统评估模型在空间推理和物理常识理解上的表现。近期研究聚焦于三个核心维度:模型在部分完成场景中的表现、故障诊断能力以及规划鲁棒性。随着多模态大模型在具身智能领域的广泛应用,PhyBlock为研究者提供了首个结合物理仿真与认知层次理论的测试基准,特别是在复杂空间依赖关系和长时程规划任务中暴露出当前VLMs的显著局限性。相关研究揭示了模型在欧拉角估计和支撑依赖推理等底层物理认知上的普遍缺陷,这一发现为改进模型架构中的显式物理表征提供了明确方向。
相关研究论文
- 1PhyBlock: A Progressive Benchmark for Physical Understanding and Planning via 3D Block Assembly莫哈梅德·本·扎耶德人工智能大学、中山大学、上海交通大学、清华大学 · 2025年
以上内容由遇见数据集搜集并总结生成


