Oxford Spires Dataset
收藏arXiv2024-11-16 更新2024-11-20 收录
下载链接:
https://dynamic.robots.ox.ac.uk/datasets/oxford-spires/
下载链接
链接失效反馈官方服务:
资源简介:
Oxford Spires Dataset是由牛津大学工程科学系创建的一个大规模多模态数据集,涵盖了牛津市内外的六个历史地标。该数据集包含高分辨率的RGB图像流、3D LiDAR数据和惯性数据,以及由地面激光扫描仪(TLS)生成的毫米级精确参考扫描,用于作为重建系统的参考地面真值3D模型。数据集的创建旨在解决户外SLAM系统中的定位、重建和新视角合成问题,特别关注辐射场方法的评估和改进。通过提供丰富的传感器数据和精确的地面真值,该数据集为评估和开发先进的SLAM、SfM、MVS和辐射场方法提供了宝贵的资源。
The Oxford Spires Dataset is a large-scale multimodal dataset developed by the Department of Engineering Science at the University of Oxford, encompassing six historical landmarks within and around the city of Oxford. It contains high-resolution RGB image streams, 3D LiDAR data, inertial data, as well as millimeter-precision reference scans generated by Terrestrial Laser Scanners (TLS), which serve as the reference ground-truth 3D models for reconstruction systems. The dataset was created to address the challenges of localization, reconstruction, and novel view synthesis in outdoor SLAM systems, with a particular focus on the evaluation and improvement of radiance field-based methods. By providing rich sensor data and precise ground-truth references, this dataset serves as a valuable resource for evaluating and developing state-of-the-art SLAM, SfM, MVS, and radiance field approaches.
提供机构:
牛津大学工程科学系
创建时间:
2024-11-16
原始信息汇总
Oxford Spires Dataset
概述
- 数据集名称: Oxford Spires Dataset
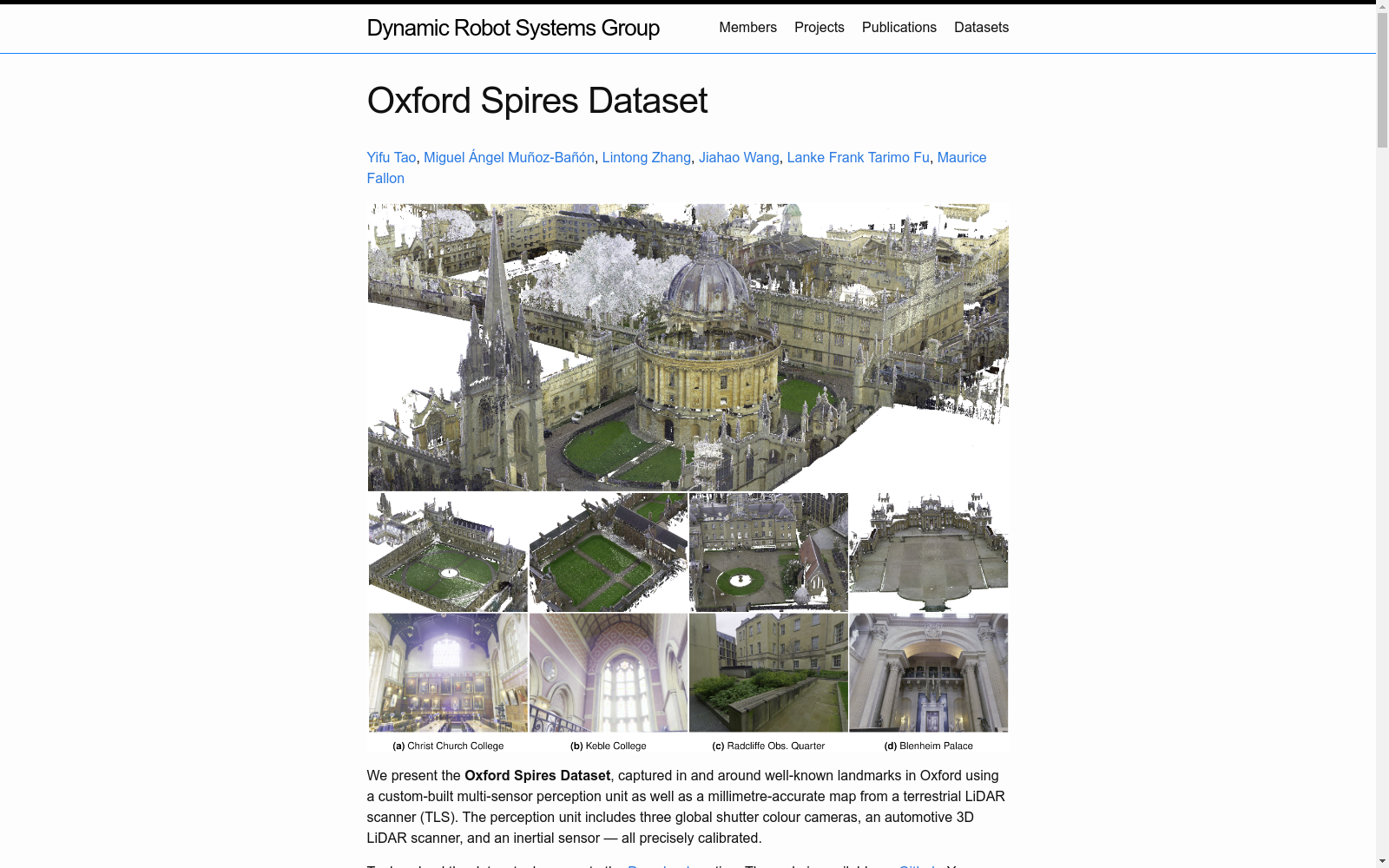
- 描述: 该数据集在牛津的著名地标周围使用定制的多传感器感知单元以及毫米级精度的地面激光扫描仪(TLS)捕获。感知单元包括三个全局快门彩色相机、一个汽车3D LiDAR扫描仪和一个惯性传感器,所有传感器均经过精确校准。
感知单元
- 设备: Frontier
- 传感器:
- LiDAR: Hesai QT64,64通道,最大范围60米,垂直视场104°,频率10 Hz
- IMU: Alphasense Core Development Kit,手机级,与相机同步,频率400 Hz
- 相机: 3个彩色鱼眼相机,视场126°×92.4°,分辨率1440×1080,频率20 Hz
- 校准: 相机内参和相机-IMU外参使用Kalibr校准,相机-LiDAR外参使用DiffCal校准。所有校准参数均包含在数据集中。
数据集记录
- 设备: 背包式安装
- 记录地点:
- Bodleian Library
- Blenheim Palace
- Christ Church College
- Keble College
- Radcliffe Observatory Quarter
- New College
- 记录信息:
- Bodleian Library: 2个序列,总长度1.29公里,户外
- Blenheim Palace: 5个序列,总长度2.18公里,户外-室内
- Christ Church College: 6个序列,总长度4.12公里,户外-室内
- Keble College: 5个序列,总长度2.87公里,户外-室内
- Radcliffe Observatory Quarter: 2个序列,总长度0.79公里,户外
- New College: 4个序列,总长度1.66公里,户外-室内
地面真值
- 设备: Leica RTC360 TLS
- 精度: 10米处1.9毫米,40米处5.3毫米
- 3D参考模型: 提供每个站点的单独扫描和合并版本(1厘米分辨率)
- 轨迹真值: 通过ICP将Frontier的未失真LiDAR点云注册到TLS地图计算,精度约为1-2厘米
文件结构
- raw: 包含传感器原始数据
- processed: 包含VILENS-SLAM和COLMAP处理后的数据
- trajectory: 包含TUM格式的轨迹数据
- ground truth: 包含TLS地图和轨迹的真值数据
代码
- Github: ori-drs/oxford_spires_dataset
下载
- 链接: 下载链接
联系
- Github Issues: Github Issues
- Email: oxfordspiresdataset@robots.ox.ac.uk
搜集汇总
数据集介绍
构建方式
Oxford Spires Dataset的构建基于在牛津知名地标周围使用定制的多传感器感知单元进行的大规模数据采集。该感知单元包括三个同步的全局快门彩色摄像头、一个汽车级3D LiDAR扫描仪和一个惯性传感器,所有这些设备都经过精确校准。此外,数据集还包含来自地面LiDAR扫描仪(TLS)的毫米级精确地图。通过将移动LiDAR扫描与TLS 3D模型进行注册,计算出定位的真值。辐射场方法的评估不仅包括从输入轨迹采样的姿态,还包括从远离训练姿态的轨迹中采样的视角。
特点
Oxford Spires Dataset的显著特点在于其大规模的户外数据采集,涵盖了六个历史遗址,每个遗址的平均面积约为1公顷。数据集包括24个序列,每个序列的平均行驶距离超过400米。此外,数据集配备了高分辨率的彩色图像流、3D宽视场LiDAR数据和惯性数据,以及毫米级精确的参考3D模型。这些特性使其成为评估同时定位与地图构建(SLAM)方法、结构从运动(SfM)和多视图立体(MVS)方法以及辐射场方法的理想基准。
使用方法
Oxford Spires Dataset的使用方法包括对定位、3D重建和新视图合成的基准测试。用户可以通过提供的软件工具解析和评估数据,这些工具支持对SLAM系统、SfM、MVS、NeRF和3D高斯喷射方法的评估。数据集的原始和处理数据,包括LiDAR SLAM系统的示例输出和SfM系统的输出,以及真值轨迹和重建数据,都可以通过提供的链接访问。此外,数据集还提供了用于计算尺度参数和重新缩放MVS重建和辐射场重建到公制大小的工具,以确保与公制真值的比较。
背景与挑战
背景概述
Oxford Spires Dataset 是由牛津大学机器人研究所的 Yifu Tao 等人于2025年创建的一个大规模多模态数据集,旨在为大规模LiDAR-视觉定位、重建和辐射场方法提供基准测试。该数据集在牛津的六个历史地标周围采集,使用了定制的多传感器感知单元和毫米级精度的地面激光扫描(TLS)地图。感知单元包括三个同步的全局快门彩色摄像头、一个车载3D LiDAR扫描仪和一个惯性传感器,所有设备均经过精确校准。该数据集不仅为同时定位与地图构建(SLAM)方法、运动结构(SfM)和多视图立体(MVS)方法提供了基准测试,还为神经辐射场(NeRF)和3D高斯喷射等辐射场方法提供了评估平台。通过利用这些丰富的传感器数据,Oxford Spires Dataset 为户外移动机器人感知领域的研究开辟了新的研究方向。
当前挑战
Oxford Spires Dataset 在构建过程中面临多项挑战。首先,户外环境的复杂性和大规模性使得TLS数据的采集变得异常繁琐,且成本高昂。其次,现有的户外SLAM数据集大多缺乏精确的TLS重建作为地面实况,依赖于其他传感器如GNSS-RTK提供的轨迹数据,这在城市峡谷等区域并不可靠。此外,辐射场方法在户外移动机器人感知中的应用尚未充分探索,这些方法通常在受控照明条件下的室内环境中进行评估,而在户外环境中,轨迹通常不是以物体为中心,且视点相对稀疏,这增加了从图像中推断3D结构的难度。最后,当前的辐射场方法在处理远离训练序列的视点时,存在过拟合训练数据和泛化能力不足的问题,这限制了其在实际机器人应用中的有效性。
常用场景
经典使用场景
Oxford Spires Dataset 在机器人和计算机视觉领域中,最经典的使用场景之一是用于评估大规模 LiDAR-视觉定位、重建和辐射场方法。该数据集通过在牛津的多个历史地标周围采集的高分辨率 RGB 图像流、3D LiDAR 数据和惯性数据,为同时定位与地图构建(SLAM)、结构从运动(SfM)和多视图立体(MVS)方法提供了丰富的基准。此外,该数据集还支持辐射场方法如神经辐射场(NeRF)和 3D 高斯喷射的评估,特别是在新颖视图合成任务中,这些方法的泛化能力得到了深入探讨。
解决学术问题
Oxford Spires Dataset 解决了在户外环境中缺乏高质量基准数据的问题,特别是在大规模场景中进行 3D 重建和定位的精确评估。传统的户外 SLAM 数据集往往缺乏毫米级精度的重建地面真值,而该数据集通过结合高精度地面激光扫描仪(TLS)生成的 3D 模型,填补了这一空白。此外,数据集还揭示了当前辐射场方法在处理远距离视角时的泛化能力不足,为学术界提供了改进现有方法的研究方向。
衍生相关工作
基于 Oxford Spires Dataset,许多相关工作得以展开,特别是在 LiDAR-视觉融合、SLAM 系统和辐射场方法的改进方面。例如,一些研究通过该数据集验证了多传感器融合在提高定位精度方面的有效性,而另一些研究则探讨了如何提升辐射场方法在复杂户外环境中的泛化能力。此外,该数据集还促进了新型 SLAM 系统和 3D 重建算法的开发,为机器人和计算机视觉领域的进一步研究提供了坚实的基础。
以上内容由遇见数据集搜集并总结生成


