VECTOR
收藏arXiv2022-07-04 更新2024-06-21 收录
下载链接:
https://star-datasets.github.io/vector/
下载链接
链接失效反馈官方服务:
资源简介:
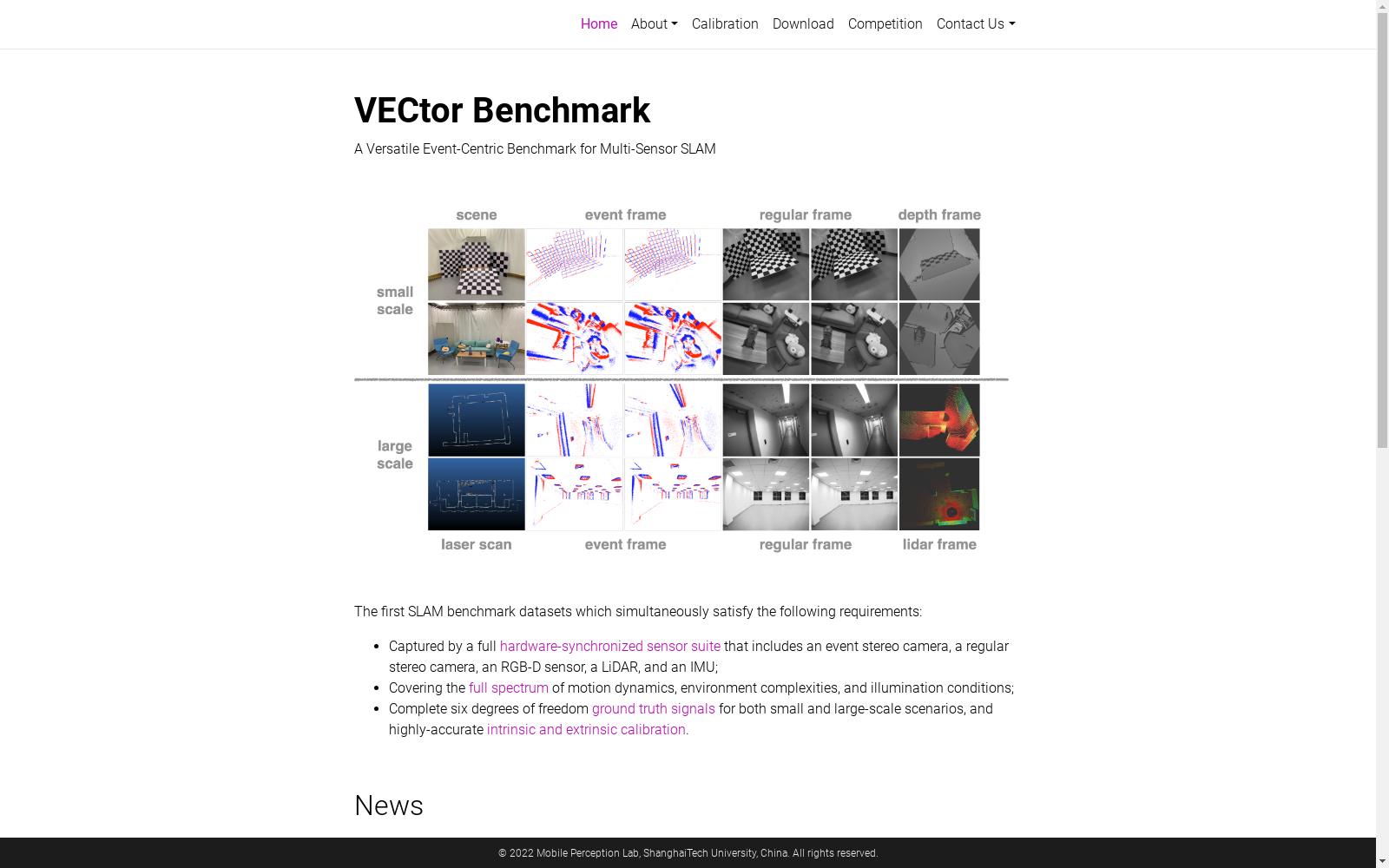
VECTOR数据集是由上海科技大学信息科学与技术学院移动感知实验室创建,旨在为多传感器同步定位与地图构建(SLAM)提供全面基准。该数据集包含多种传感器数据,包括事件立体相机、常规立体相机、多个深度传感器和惯性测量单元,所有数据均硬件同步并经过精确外部校准。数据集涵盖从小规模到大规模的环境,以及动态视觉传感器所针对的特定挑战。此外,数据集还提供了由高精度外部参考设备捕获的地面实况数据,如运动捕捉系统。VECTOR数据集适用于解决智能移动代理在复杂环境中的定位与地图构建问题,特别是在高动态或挑战性光照条件下。
The VECTOR Dataset was created by the Mobile Perception Laboratory, School of Information Science and Technology, ShanghaiTech University, aiming to provide a comprehensive benchmark for multi-sensor simultaneous localization and mapping (SLAM). This dataset contains various sensor data, including event stereo cameras, regular stereo cameras, multiple depth sensors, and inertial measurement units (IMUs). All data is hardware-synchronized and accurately externally calibrated. The dataset covers environments ranging from small-scale to large-scale, as well as specific challenges targeted by dynamic vision sensors. In addition, the dataset also provides ground truth data captured by high-precision external reference devices, such as motion capture systems. The VECTOR Dataset is suitable for addressing the localization and mapping problems of intelligent mobile agents in complex environments, especially under highly dynamic or challenging lighting conditions.
提供机构:
上海科技大学信息科学与技术学院移动感知实验室
创建时间:
2022-07-04
搜集汇总
数据集介绍
构建方式
VECTOR数据集通过一个多传感器设置构建,包括一个基于事件的立体相机、一个常规立体相机、多个深度传感器和一个惯性测量单元。所有传感器均经过硬件同步,并进行了精确的外部校准。数据集的序列包括小规模和大规模环境,涵盖了动态视觉传感器所针对的具体挑战。此外,所有序列均配备了由高精度外部参考设备(如运动捕捉系统)捕获的地面实况数据。
特点
VECTOR数据集的主要特点是其多模态传感器的全面集成和精确校准。数据集不仅包括事件相机的高时间分辨率数据,还结合了常规相机、深度传感器和IMU的数据,提供了丰富的环境感知信息。此外,数据集涵盖了从低光照到高动态范围的各种光照条件,以及从小规模到大规模的不同环境复杂度,为多传感器SLAM研究提供了全面的基准。
使用方法
VECTOR数据集适用于评估和开发多传感器SLAM算法。用户可以通过提供的ROS bag文件访问所有传感器数据,并使用附带的工具箱进行校准、事件可视化、数据验证和深度重投影等操作。数据集的地面实况数据可用于计算相对姿态误差(RPE)和绝对轨迹误差(ATE),以评估算法的性能。此外,数据集还支持多种流行的SLAM算法,如ORB-SLAM3、VINS-Mono和LIO-SAM,用于验证和比较。
背景与挑战
背景概述
VECTOR数据集由上海科技大学的移动感知实验室于2022年创建,主要研究人员包括Ling Gao、Yuxuan Liang、Jiaqi Yang等。该数据集专注于多传感器SLAM(同时定位与地图构建)领域,特别是结合事件相机(Dynamic Vision Sensor, DVS)的应用。事件相机因其高动态范围和低功耗特性,在高速运动和复杂光照条件下具有显著优势。VECTOR数据集通过集成事件相机、常规相机、深度传感器和惯性测量单元(IMU),提供了硬件同步和精确校准的多传感器数据,旨在推动事件相机在SLAM中的应用研究。
当前挑战
VECTOR数据集面临的挑战主要包括:1) 多传感器融合的复杂性,确保各传感器数据在时间上的同步和空间上的精确对齐;2) 事件相机在高速运动和复杂光照条件下的数据处理,如何有效提取和利用事件数据以提高SLAM的精度和鲁棒性;3) 数据集的多样性和覆盖范围,涵盖从小规模到大规模环境,以及不同光照和运动条件,以验证算法的通用性和适应性。此外,数据集的构建过程中还需克服硬件同步、精确校准和高质量地面真值获取等技术难题。
常用场景
经典使用场景
VECTOR数据集的经典使用场景主要集中在多传感器SLAM(Simultaneous Localization And Mapping)的研究中。该数据集通过整合事件相机、常规立体相机、深度传感器和惯性测量单元,提供了高度同步和精确校准的多模态数据。这些数据适用于开发和验证在动态环境和高挑战性光照条件下工作的SLAM算法。
实际应用
在实际应用中,VECTOR数据集支持开发适用于自动驾驶车辆、无人机和增强现实设备的SLAM系统。这些系统需要在复杂和动态的环境中实现精确的定位和地图构建,以确保安全和高效的导航。通过使用VECTOR数据集,开发者可以测试和优化其算法,以应对实际应用中的各种挑战,如快速运动、低光照和多变的环境条件。
衍生相关工作
VECTOR数据集的发布激发了一系列相关的研究工作,特别是在事件相机与传统视觉传感器融合的SLAM领域。例如,研究者们利用该数据集开发了新的算法,以提高在动态和高对比度环境下的定位精度。此外,该数据集还促进了多传感器同步和校准技术的研究,为未来的多模态SLAM系统奠定了基础。
以上内容由遇见数据集搜集并总结生成


