triangulang-scannetpp-cache
收藏TrianguLang ScanNet++ 预处理数据集概述
数据集基本信息
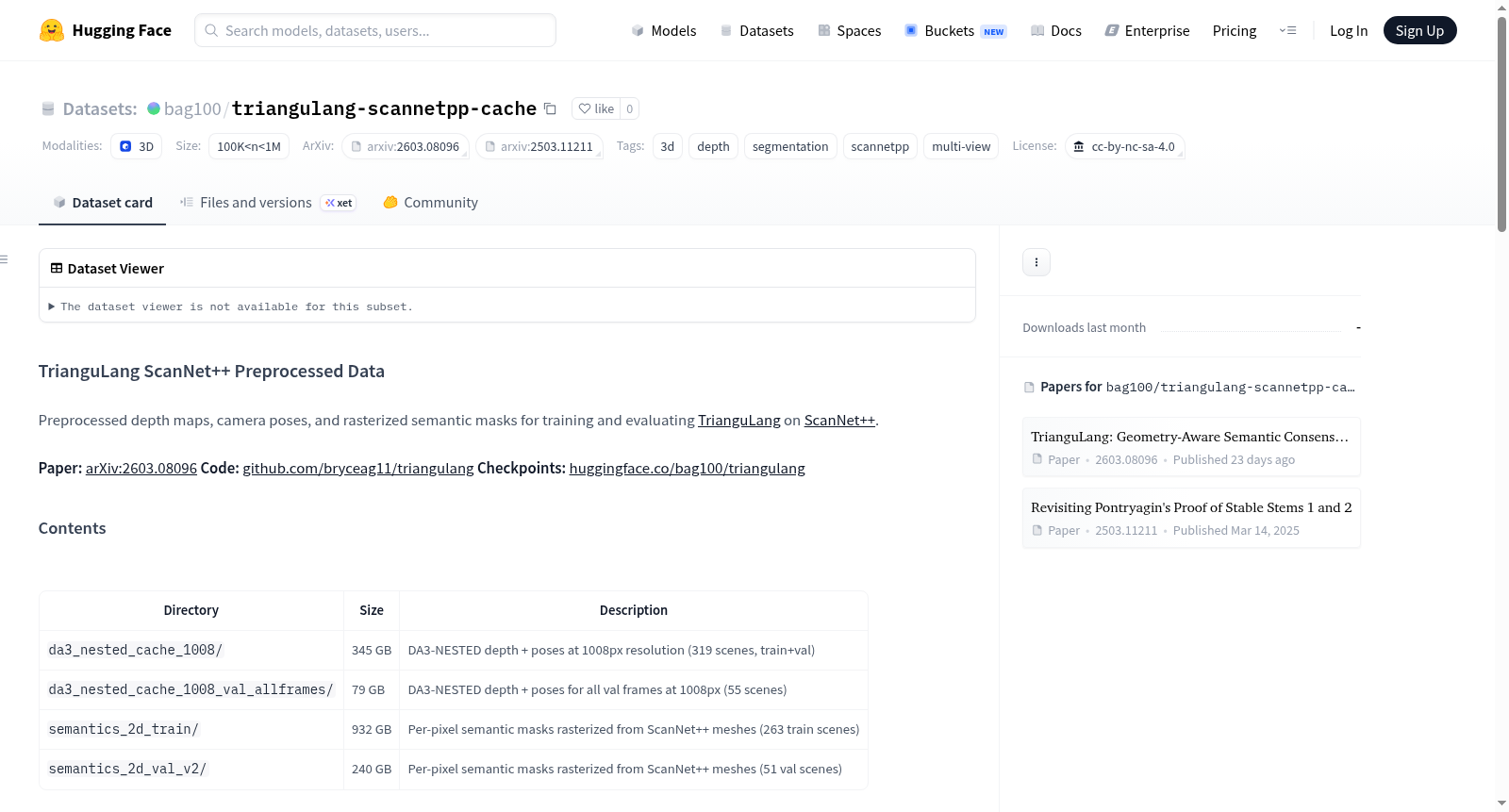
- 数据集名称: TrianguLang ScanNet++ Preprocessed Data
- 许可证: CC BY-NC-SA 4.0
- 标签: 3D, 深度, 分割, scannetpp, 多视角
- 数据规模: 100K < n < 1M
数据集描述
本数据集为在 ScanNet++ 数据集上训练和评估 TrianguLang 模型而提供的预处理数据,包含深度图、相机位姿和栅格化的语义掩码。
关联资源
- 论文: https://arxiv.org/abs/2603.08096
- 代码: https://github.com/bryceag11/triangulang
- 模型检查点: https://huggingface.co/bag100/triangulang
数据内容与结构
| 目录 | 大小 | 描述 |
|---|---|---|
da3_nested_cache_1008/ |
345 GB | 分辨率为1008px的DA3-NESTED深度图与相机位姿(319个场景,训练集+验证集) |
da3_nested_cache_1008_val_allframes/ |
79 GB | 验证集所有帧的DA3-NESTED深度图与相机位姿,分辨率为1008px(55个场景) |
semantics_2d_train/ |
932 GB | 从ScanNet++网格栅格化的逐像素语义掩码(263个训练场景) |
semantics_2d_val_v2/ |
240 GB | 从ScanNet++网格栅格化的逐像素语义掩码(51个验证场景) |
DA3-NESTED缓存数据格式
每个 .pt 文件包含一个字典,结构如下:
python
{
depth: Tensor[H, W], # float16,以米为单位的度量深度
extrinsics: Tensor[4, 4], # float32,相机到世界坐标系变换矩阵 (c2w)
intrinsics: Tensor[3, 3], # float32,相机内参矩阵
depth_conf: Tensor[H, W], # float16,深度置信度 (>= 1.0)
proc_hw: (int, int), # 经过宽高比调整后的处理分辨率
}
该数据使用 Depth Anything V3 (DA3-NESTED-GIANT-LARGE) 生成,并采用重叠分块与Sim(3)对齐以确保全局一致的位姿。
语义掩码数据格式
语义掩码是从ScanNet++ 3D网格标注投影到DSLR图像上生成的逐像素实例掩码。每个 .pth 文件是一个numpy int32数组,像素值为物体实例ID。
文件路径示例:
semantics_2d_train/{scene_id}/{frame}.JPG.pthsemantics_2d_val_v2/{scene_id}/{frame}.JPG.pth
使用要求
使用本数据集仍需原始的ScanNet++数据集以获取RGB图像、相机内参和场景元数据。需在 https://kaldir.vc.in.tum.de/scannetpp/ 申请访问权限。使用ScanNet++底层数据需同意其使用条款。
引用
如需使用本数据集,请引用以下文献: bibtex @article{grant2026triangulang, title={TrianguLang: Geometry-Aware Semantic Consensus for Pose-Free 3D Localization}, author={Grant, Bryce and Rothenberg, Aryeh and Banerjee, Atri and Wang, Peng}, journal={arXiv preprint arXiv:2603.08096}, year={2026} } @inproceedings{yeshwanth2023scannetpp, title={ScanNet++: A High-Fidelity Dataset of 3D Indoor Scenes}, author={Yeshwanth, Chandan and Liu, Yu-Chian and Nie{ss}ner, Matthias and Dai, Angela}, booktitle={Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV)}, year={2023} } @article{depth_anything_v3, title={Depth Anything V3}, author={Yang, Bingyi and Deng, Jiahao and Chen, Peijin and Luo, Kunhao and Wang, Peng and Chen, Dongsheng and Yang, Zhen and Chen, Hao and Zhu, Dacheng and Li, Yinqiang and Wang, Zhenda and others}, journal={arXiv preprint arXiv:2503.11211}, year={2025} }