LanEvil
收藏arXiv2024-06-04 更新2024-06-17 收录
下载链接:
https://lanevil.github.io/
下载链接
链接失效反馈官方服务:
资源简介:
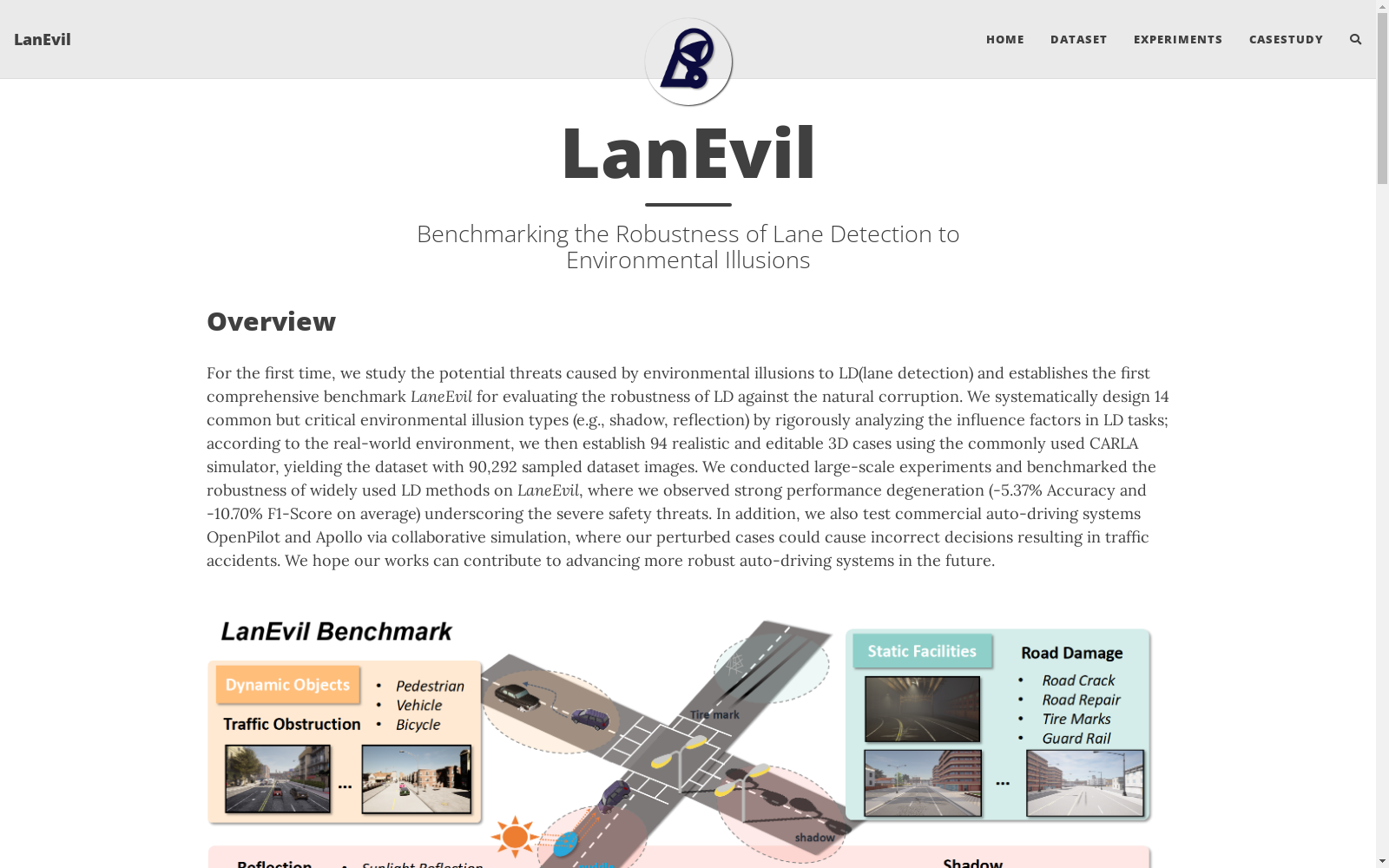
LanEvil数据集由北京航空航天大学创建,专注于评估车道检测系统在面对环境幻觉时的鲁棒性。该数据集包含90,292张通过CARLA模拟器生成的图像,涵盖了14种关键的环境幻觉类型,如阴影和反射。创建过程中,研究团队精心设计了3D交通环境,并通过模拟自然环境变化来生成图像。LanEvil数据集的应用领域主要集中在自动驾驶系统中,旨在提高系统在复杂环境下的识别准确性和安全性,解决因环境幻觉导致的误识别问题。
The LanEvil dataset, developed by Beihang University, is dedicated to evaluating the robustness of lane detection systems against environmental hallucinations. It contains 90,292 images generated through the CARLA simulator, covering 14 key types of environmental hallucinations including shadows and reflections. During the creation process, the research team meticulously designed a 3D traffic environment and generated images by simulating natural environmental changes. The primary application scenario of the LanEvil dataset is autonomous driving systems, aiming to enhance the recognition accuracy and safety of such systems in complex environments and mitigate misidentification issues caused by environmental hallucinations.
提供机构:
北京航空航天大学
创建时间:
2024-06-03
搜集汇总
数据集介绍
构建方式
LanEvil数据集通过使用CARLA模拟器创建了一个包含14种环境错觉类型的综合基准,这些错觉类型涵盖了道路损坏、交通障碍、阴影和反射等现实世界中的影响因素。研究人员首先在模拟环境中定制3D环境,并设计常见的交通场景,如T形路口。接着,他们基于错觉生成方法修改模拟环境中特定对象的属性,然后放置物体在不同的位置并生成交通流。最后,他们运行车辆代理并捕获前视图像,形成了一个包含90,292个样本图像的数据集。
特点
LanEvil数据集具有以下特点:首先,它包含了14种典型的环境错觉类型,覆盖了道路损坏、交通障碍、阴影和反射等方面,能够全面评估车道检测模型的鲁棒性。其次,该数据集包含了94个可编辑的3D场景,用户可以根据需要进行定制。最后,LanEvil数据集包含了90,292个样本图像,其中40,000个用于训练,50,292个用于测试,为车道检测模型的训练和评估提供了丰富的数据资源。
使用方法
LanEvil数据集的使用方法如下:首先,用户可以从训练集中随机选择40,000个干净图像用于训练车道检测模型。然后,用户可以使用测试集中的50,292个包含环境错觉的图像来评估模型的鲁棒性。此外,用户还可以利用LanEvil数据集中的可编辑3D场景进行进一步的实验和研究。
背景与挑战
背景概述
车道检测作为自动驾驶系统的重要组成部分,对于实现自适应巡航控制和自动车道居中等功能至关重要。然而,现有的车道检测数据集主要关注于评估常见情况,忽略了车道检测模型在面对环境幻觉,如道路上的阴影和轮胎痕迹时的鲁棒性。这种研究空白带来了重大的安全挑战,因为这些幻觉在现实世界的交通情况中自然存在。为了填补这一空白,本研究首次研究了这些环境幻觉对车道检测模型的潜在威胁,并建立了首个全面的车道检测鲁棒性评估基准LanEvil。该数据集包含14种常见且关键的环境幻觉类型,覆盖了车道检测任务中广泛的影响因素。基于真实世界环境,研究人员使用CARLA模拟器创建了94个现实且可定制的3D案例,形成了一个包含90,292个样本图像的数据集。通过广泛的实验,研究人员使用LanEvil基准对流行的车道检测方法的鲁棒性进行了评估,揭示了性能的显著下降(平均准确率下降5.37%,F1分数下降10.70%),其中阴影效果造成了最大的风险(准确率下降7.39%)。此外,研究人员还通过协作模拟评估了商业自动驾驶系统OpenPilot和Apollo的性能,证明了所提出的环境幻觉可能导致错误的决策和潜在的交通事故。
当前挑战
LanEvil数据集的研究背景和挑战主要围绕着车道检测模型的鲁棒性问题。具体挑战包括:1) 现有车道检测数据集主要关注于常见交通情况,忽略了模型在面对环境幻觉时的鲁棒性评估;2) 环境幻觉的存在使得直接收集包含不同类型幻觉的大规模真实世界图像变得困难;3) 评估车道检测模型在面对环境幻觉时的鲁棒性需要构建一个全面且多样化的数据集,这需要精细的设计和大量的实验工作。为了应对这些挑战,研究人员提出了Attention Area Mixing (AAM)方法,该方法通过使用硬示例来提高模型对环境幻觉的鲁棒性,并在LanEvil数据集上取得了显著的性能提升。此外,研究人员还通过模拟实验和真实世界案例研究,展示了环境幻觉对商业自动驾驶系统的潜在威胁。
常用场景
经典使用场景
LanEvil 数据集专为评估车道检测模型在面对环境错觉时的鲁棒性而设计。该数据集包含 14 种常见且关键的环境错觉类型,如阴影、反射等,这些错觉因素在真实世界的交通场景中普遍存在,却常常被现有数据集所忽略。通过使用 CARLA 模拟器生成的 94 个真实且可定制的 3D 场景,LanEvil 提供了 90,292 个样本图像,涵盖了从训练到测试的完整流程。LanEvil 数据集的经典使用场景在于,它为研究人员提供了一个平台,以评估和比较不同车道检测方法在面对环境错觉时的性能,从而推动更鲁棒的自动驾驶系统的发展。
解决学术问题
LanEvil 数据集填补了现有车道检测数据集在环境错觉方面的空白,解决了现有数据集主要关注常见情况而忽略环境错觉对车道检测模型鲁棒性的影响的问题。LanEvil 通过引入自然环境中的错觉因素,如阴影、反射等,为车道检测模型提供了一个更接近真实世界的评估环境,从而提高了模型的实用性和安全性。LanEvil 的提出和实施,对于自动驾驶系统的安全性和可靠性研究具有重要意义,并为相关领域的学术研究提供了新的方向和工具。
衍生相关工作
LanEvil 数据集的提出和实施,衍生了许多相关的研究工作。例如,基于 LanEvil 数据集,研究人员可以设计新的噪声防御方法,以提高车道检测模型在面对环境错觉时的鲁棒性。此外,LanEvil 数据集还可以用于评估和改进其他视觉感知任务,如物体检测、语义分割等,以应对环境变化带来的挑战。LanEvil 数据集的应用将有助于推动自动驾驶技术的发展,并为构建更加安全、可靠的智能交通系统提供支持。
以上内容由遇见数据集搜集并总结生成


