FLAT
收藏arXiv2018-07-27 更新2024-06-21 收录
下载链接:
http://research.nvidia.com/publication/2018-09_Tackling-3D-ToF
下载链接
链接失效反馈官方服务:
资源简介:
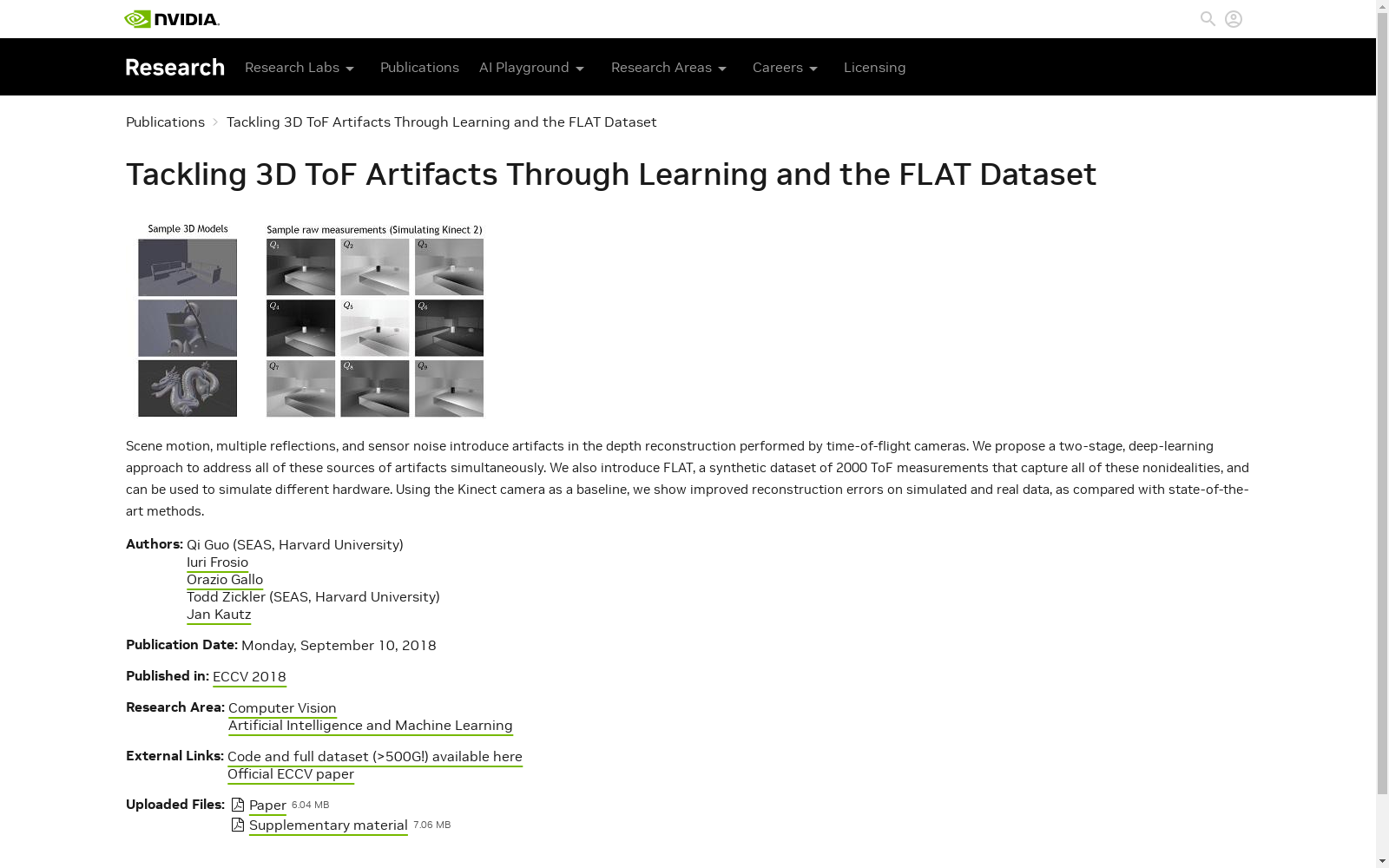
FLAT数据集是由NVIDIA创建的一个大型合成数据集,包含2000个ToF测量,旨在模拟MPI、运动伪影、传感器噪声等非理想情况,并支持不同相机硬件的模拟。数据集通过瞬态渲染技术生成,包含多种场景和物体,支持添加噪声、纹理和运动等增强功能。FLAT数据集主要用于训练和评估深度神经网络,以改善ToF相机的深度重建质量,特别是在动态场景和多路径干扰下的表现。
The FLAT dataset is a large-scale synthetic dataset developed by NVIDIA, consisting of 2000 ToF measurements. It aims to simulate non-ideal scenarios including MPI, motion artifacts, and sensor noise, and supports the simulation of different camera hardware. Generated using transient rendering technology, the dataset encompasses various scenes and objects, and supports augmentation functions such as noise addition, texture modification, and motion simulation. The FLAT dataset is primarily utilized for training and evaluating deep neural networks to enhance the depth reconstruction quality of ToF cameras, especially their performance in dynamic scenes and under multi-path interference.
提供机构:
NVIDIA, 哈佛大学工程与应用科学学院
创建时间:
2018-07-27
搜集汇总
数据集介绍
构建方式
FLAT数据集通过使用70个物体设置的3D模型,并从30个不同的视角和方向进行渲染,模拟了多种场景。每个场景由1000个连续的时间间隔组成,每个间隔为5e-11秒。场景使用双向路径跟踪来模拟多径效应。此外,FLAT数据集允许用户通过纹理映射、运动、渐晕和噪声等手段增强原始测量数据,以适应不同的相机响应函数和场景条件。
使用方法
FLAT数据集可用于训练和评估深度估计算法。它允许研究人员在模拟和真实数据上测试他们的算法,并比较不同方法的效果。FLAT数据集还允许用户通过添加纹理、运动、渐晕和噪声等手段增强原始测量数据,以适应不同的相机响应函数和场景条件。此外,FLAT数据集还提供了代码和工具,帮助用户生成和使用数据集。
背景与挑战
背景概述
FLAT数据集是在2018年由NVIDIA和哈佛SEAS的研究人员创建的,旨在解决飞行时间(ToF)相机深度重建中的问题。ToF相机利用光子从传感器到物体再返回所需的时间来估计物体的距离,从而实现深度重建。然而,场景运动、多路径反射和传感器噪声等因素会引入伪影,影响深度重建的准确性。FLAT数据集是一个包含2000个ToF测量的合成数据集,它模拟了所有这些非理想情况,并允许模拟不同的相机硬件。该数据集使用Kinect 2相机作为基准,展示了比现有方法更好的重建误差,无论是在模拟数据还是真实数据上。
当前挑战
FLAT数据集面临的挑战包括:1) 解决的场景问题是深度重建中的伪影问题,包括场景运动、多路径反射和传感器噪声等因素引入的伪影;2) 构建过程中遇到的挑战,如需要模拟不同相机硬件的深度重建,以及需要处理MPI和运动带来的伪影。
常用场景
经典使用场景
FLAT数据集作为深度学习模型训练的理想数据集,其通过模拟不同场景下的ToF测量值,为研究人员提供了一个丰富多样的数据来源。数据集中包含了运动、多重反射和传感器噪声等因素,使得深度重建的挑战性得以体现,从而训练出更为精准的深度学习模型。此外,FLAT数据集还允许模拟不同相机硬件,为不同硬件平台下的深度重建算法提供了验证和优化的可能。
解决学术问题
FLAT数据集的提出解决了深度重建中常见的学术研究问题,即如何有效地处理运动、多重反射和传感器噪声等因素对深度重建的影响。通过提供大量的模拟数据,FLAT数据集使得研究人员能够更加系统地研究这些因素对深度重建的影响,并提出更为有效的深度重建算法。此外,FLAT数据集还提供了不同相机硬件的模拟数据,为不同硬件平台下的深度重建算法提供了验证和优化的可能。
实际应用
FLAT数据集在实际应用场景中具有广泛的应用前景。例如,在自动驾驶领域,FLAT数据集可以帮助研究人员训练出更为精准的深度学习模型,从而提高自动驾驶车辆的环境感知能力;在机器人领域,FLAT数据集可以帮助研究人员训练出更为精准的深度学习模型,从而提高机器人的导航和避障能力;在虚拟现实领域,FLAT数据集可以帮助研究人员训练出更为精准的深度学习模型,从而提高虚拟现实环境的真实感和沉浸感。
数据集最近研究
最新研究方向
深度学习技术在处理时间飞行(ToF)相机深度重建中的运动伪影、多路径干扰和传感器噪声方面取得了显著进展。本文提出了一种两阶段的深度学习方法,旨在同时解决这些伪影的来源。此外,还引入了FLAT数据集,这是一个包含2000个ToF测量的合成数据集,捕捉了所有这些非理想性,并允许模拟不同的相机硬件。使用Kinect 2相机作为基线,我们展示了比现有方法更好的重建误差,无论是在模拟还是真实场景下。
相关研究论文
- 1Tackling 3D ToF Artifacts Through Learning and the FLAT DatasetNVIDIA, 哈佛大学工程与应用科学学院 · 2018年
以上内容由遇见数据集搜集并总结生成


