GATE-VLAP
收藏GATE-VLAP 数据集概述
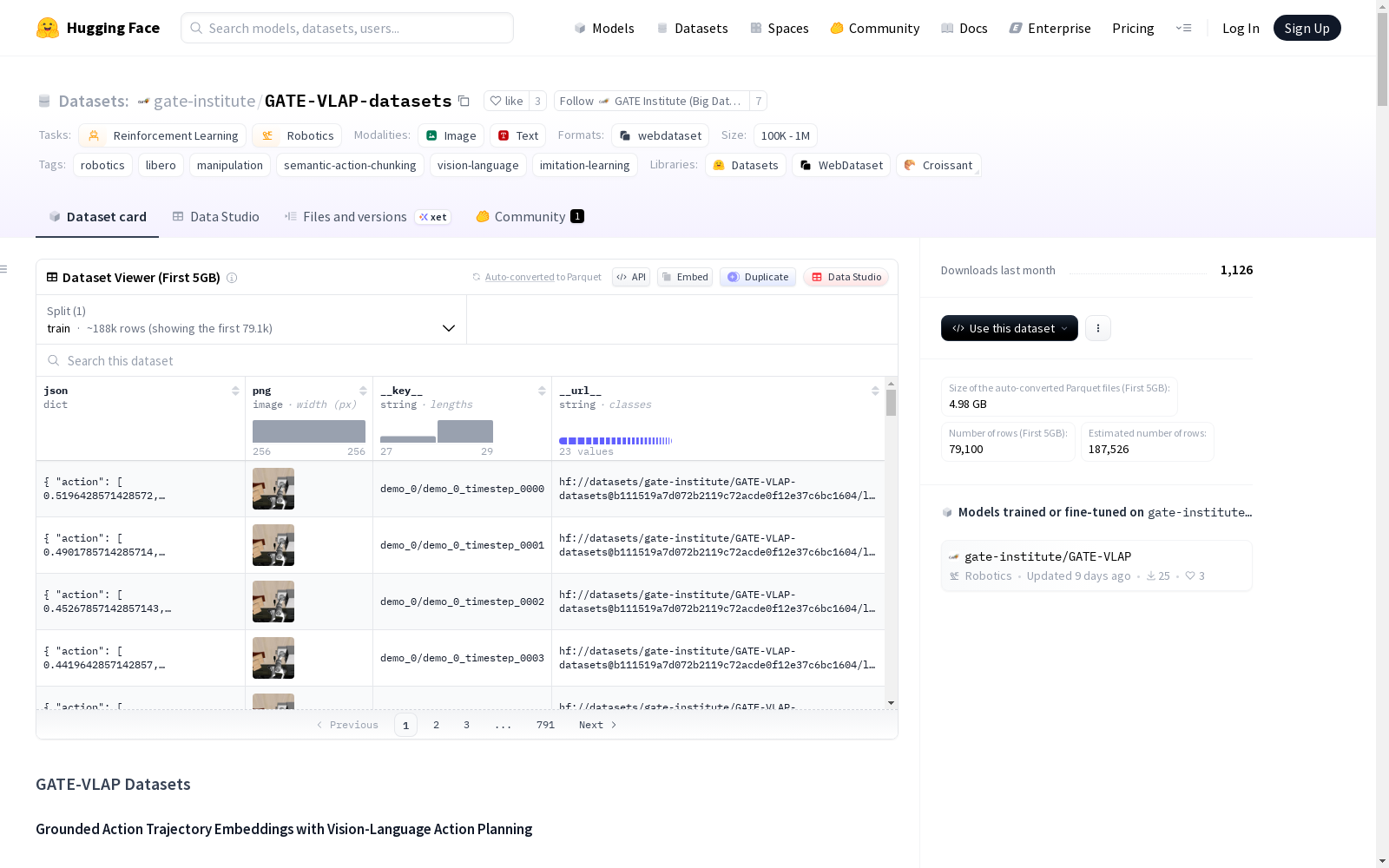
数据集基本信息
- 数据集名称: GATE-VLAP Datasets
- 任务类别: 强化学习、机器人学
- 标签: 机器人学、LIBERO、操作、语义动作分块、视觉语言、模仿学习
- 数据规模: 10万 < n < 100万
- 数据格式: WebDataset TAR 格式
数据集内容
1. LIBERO-10 (长视野任务)
- 任务类型: 10个复杂的长视野操作任务
- 分割方法: 使用 Gemini Vision API 进行语义动作分块
- 演示数量: 29个子任务共1,354个演示
- 帧总数: 103,650帧
- TAR文件: 29个文件(每个子任务一个)
示例任务:
pick_up_the_black_bowl.tar→ 拾取和放置子任务close_the_drawer.tar→ 接近、抓握、关闭子任务put_the_bowl_in_the_drawer.tar→ 多步骤拾取、打开、放置、关闭序列
2. LIBERO-Object (对象操作)
- 任务类型: 10个以对象为中心的操作任务
- 分割方法: 使用 Gemini Vision API 进行语义动作分块
- 演示数量: 20个子任务共875个演示
- 帧总数: 66,334帧
- TAR文件: 20个文件(每个子任务一个)
示例任务:
pick_up_the_alphabet_soup.tar→ 接近、抓握、抬起place_the_alphabet_soup_on_the_basket.tar→ 移动、定位、放置、释放
数据集结构
gate-institute/GATE-VLAP-datasets/ ├── libero_10/ # 长视野任务 (29个TAR文件) ├── libero_object/ # 对象操作 (20个TAR文件) └── metadata/ # 数据集统计与分割信息 ├── libero_10_complete_stats.json ├── libero_10_all_segments.json ├── libero_object_complete_stats.json └── libero_object_all_segments.json
TAR文件内部结构
提取 pick_up_the_black_bowl.tar 后:
pick_up_the_black_bowl/ ├── demo_0/ │ ├── demo_0_timestep_0000.png # RGB观察 (128×128) │ ├── demo_0_timestep_0000.json # 动作 + 元数据 │ ├── demo_0_timestep_0001.png │ ├── demo_0_timestep_0001.json │ └── ... ├── demo_1/ │ └── ... └── ... (此子任务的所有演示)
数据格式详情
JSON元数据 (每时间步)
每个 .json 文件包含:
json
{
"action": [0.1, -0.2, 0.0, 0.0, 0.0, 0.0, 1.0], // 7自由度动作
"robot_state": [...], // 关节状态
"demo_id": "demo_0",
"timestep": 42,
"subtask": "pick_up_the_black_bowl",
"parent_task": "LIBERO_10",
"is_stop_signal": false // 片段边界
}
动作空间
- 维度: 7自由度
[0:3]: 末端执行器位置增量 (x, y, z)[3:6]: 末端执行器方向增量 (roll, pitch, yaw)[6]: 夹爪动作 (0.0 = 关闭, 1.0 = 打开)
- 范围: 归一化到 [-1, 1]
- 控制: 增量动作(相对于当前姿态)
图像格式
- 分辨率: 128×128像素
- 通道: RGB (3通道)
- 格式: PNG (无损压缩)
- 摄像头: 前向代理视角摄像头
元数据文件说明
1. libero_10_complete_stats.json
- 用途: 整个LIBERO-10数据集的概览统计
- 使用场景: 理解数据集组成、规划训练分割、检查任务间的演示/帧分布
2. libero_10_all_segments.json
- 用途: 每个演示的详细分割元数据
- 包含内容: 语义动作块,包括片段边界(起始/结束帧)、动作描述、片段类型(到达、抓握、移动、放置等)、Gemini Vision API分割方法
- 使用场景: 使用语义动作块进行训练、实现分层策略、分析动作原语、按片段类型过滤
3. libero_object_complete_stats.json
- 用途: LIBERO-Object数据集的统计信息
4. libero_object_all_segments.json
- 用途: LIBERO-Object演示的语义动作分块分割信息
引用信息
如果使用此数据集,请引用: bibtex @article{gateVLAP@SAC2026, title={Atomic Action Slicing: Planner-Aligned Options for Generalist VLA Agents}, author={Stefan Tabakov, Asen Popov, Dimitar Dimitrov, Ensiye Kiyamousavi and Boris Kraychev}, journal={arXiv preprint arXiv:XXXX.XXXXX}, conference={The 41st ACM/SIGAPP Symposium On Applied Computing (SAC2026), track on Intelligent Robotics and Multi-Agent Systems (IRMAS)}, year={2025} }
@inproceedings{liu2023libero, title={LIBERO: Benchmarking Knowledge Transfer for Lifelong Robot Learning}, author={Liu, Bo and Zhu, Yifeng and Gao, Chongkai and Feng, Yihao and Liu, Qiang and Zhu, Yuke and Stone, Peter}, booktitle={NeurIPS Datasets and Benchmarks Track}, year={2023} }
相关资源
- 模型检查点: https://huggingface.co/gate-institute/GATE-VLAP
- 原始LIBERO: https://github.com/Lifelong-Robot-Learning/LIBERO
致谢
- LIBERO基准: Liu等人 (2023) 的原始数据集
- 分割: 用于语义动作分块的Gemini Vision API
- 机构: GATE Institute, Sofia, Bulgaria (https://www.gate-ai.eu/en/home/)
联系信息
如有问题,请联系GATE Institute (https://www.gate-ai.eu/en/home/)。
数据集版本: 1.0 最后更新: 2025年12月 维护者: GATE Institute (https://www.gate-ai.eu/en/home/)
- 1Atomic Action Slicing: Planner-Aligned Options for Generalist VLA Agents索菲亚大学 'St. Kliment Ohridski',索菲亚技术大学,特文特大学,GATE研究所 · 2025年


