Multi-Sensor Corruption Benchmark (MSC-Bench)
收藏arXiv2025-01-02 更新2025-01-06 收录
下载链接:
https://msc-bench.github.io/
下载链接
链接失效反馈官方服务:
资源简介:
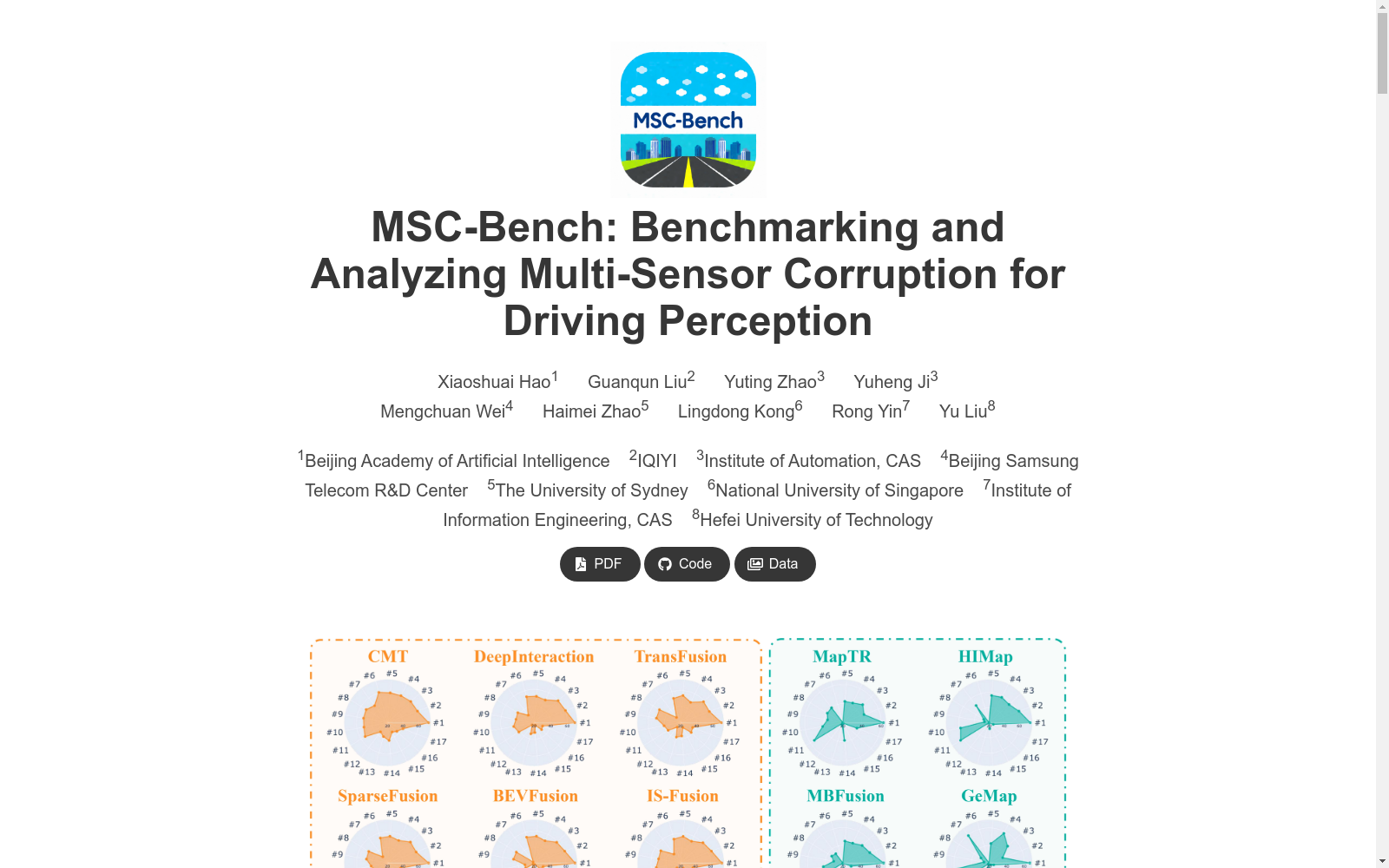
MSC-Bench是由北京人工智能研究院等机构创建的多传感器损坏基准测试数据集,旨在评估自动驾驶感知模型在传感器损坏情况下的鲁棒性。该数据集包含16种损坏类型,涵盖了天气、内部和传感器故障场景,基于nuScenes数据集的验证集构建。数据集通过模拟多种传感器损坏情况,如相机崩溃、帧丢失、交叉传感器干扰等,评估了六种3D目标检测模型和四种高精地图构建模型的性能。该数据集的应用领域主要集中在自动驾驶感知系统的鲁棒性评估,旨在解决传感器损坏对自动驾驶系统安全性的影响问题。
MSC-Bench is a multi-sensor corruption benchmark dataset developed by institutions including the Beijing Academy of Artificial Intelligence and other related institutions, aiming to evaluate the robustness of autonomous driving perception models under sensor corruption scenarios. This dataset includes 16 types of corruption cases covering weather-related issues, internal system faults and sensor failure scenarios, and is constructed based on the validation set of the nuScenes dataset. By simulating various sensor corruption situations such as camera crash, frame loss, cross-sensor interference and others, the dataset evaluates the performance of six 3D object detection models and four high-precision map construction models. The application scope of this dataset mainly focuses on the robustness evaluation of autonomous driving perception systems, with the goal of addressing the impact of sensor corruption on the safety of autonomous driving systems.
提供机构:
北京人工智能研究院, 爱奇艺, 中国科学院自动化研究所, 三星, 悉尼大学, 新加坡国立大学, 中国科学院信息工程研究所, 合肥工业大学
创建时间:
2025-01-02
搜集汇总
数据集介绍
构建方式
Multi-Sensor Corruption Benchmark (MSC-Bench) 的构建基于 nuScenes 数据集的验证集,通过引入 16 种不同类型的传感器损坏来模拟真实世界中的多传感器失效场景。这些损坏类型涵盖了天气、内部环境以及传感器故障三大类别,具体包括雾、雪、运动模糊、空间错位、时间错位、相机崩溃、帧丢失、交叉传感器干扰等。每种损坏类型均设置了三个严重程度等级,以评估模型在不同损坏强度下的鲁棒性。通过这种系统化的损坏引入,MSC-Bench 提供了一个全面的多传感器损坏评估框架。
特点
MSC-Bench 的核心特点在于其全面性和多样性。它不仅涵盖了单一传感器的损坏,还引入了多传感器同时失效的复杂场景,如相机崩溃与交叉传感器干扰的组合。此外,该数据集通过模拟恶劣天气条件(如雾和雪)以及传感器内部故障(如帧丢失和交叉干扰),为多传感器融合模型的鲁棒性评估提供了丰富的测试场景。这些特点使得 MSC-Bench 成为首个专注于多传感器损坏的综合性基准测试工具,填补了现有研究中对多传感器融合模型在损坏条件下性能评估的空白。
使用方法
MSC-Bench 的使用方法主要包括两个步骤:模型评估与性能分析。首先,用户可以将多传感器融合模型(如 3D 目标检测或高精度地图构建模型)在 MSC-Bench 上进行测试,评估其在 16 种损坏类型下的表现。其次,通过分析模型在不同损坏类型和严重程度下的性能变化,用户可以识别模型的薄弱环节,并优化其鲁棒性。MSC-Bench 提供了详细的评估指标,如 Resilience Score (RS) 和 Relative Resilience Score (RRS),帮助用户量化模型的鲁棒性表现。此外,数据集还提供了损坏生成代码和基准测试工具,支持用户复现实验结果并进一步扩展研究。
背景与挑战
背景概述
Multi-Sensor Corruption Benchmark (MSC-Bench) 是由北京人工智能研究院、中国科学院自动化研究所、悉尼大学等机构的研究团队于2025年提出的首个针对多传感器自动驾驶感知模型鲁棒性评估的综合性基准。该基准旨在解决自动驾驶感知系统中多传感器融合模型在传感器数据损坏或缺失情况下的鲁棒性问题。MSC-Bench 包含16种针对相机和LiDAR传感器的损坏类型,涵盖天气、内部环境和传感器故障等多种场景。通过对六种3D目标检测模型和四种高精地图构建模型的广泛评估,MSC-Bench 揭示了传感器损坏对模型性能的显著影响,尤其是在恶劣天气和传感器故障条件下。该基准的提出填补了多传感器融合模型在损坏数据下鲁棒性评估的空白,为自动驾驶感知系统的安全性提供了重要参考。
当前挑战
MSC-Bench 所解决的核心挑战在于评估多传感器融合模型在传感器数据损坏或缺失情况下的鲁棒性。具体挑战包括:1) 传感器损坏对模型性能的影响,尤其是在恶劣天气(如雾、雪)和传感器故障(如相机崩溃、帧丢失)条件下,模型性能显著下降;2) 多传感器数据之间的对齐和同步问题,例如空间和时间错位会导致模型性能的进一步恶化;3) 构建过程中需模拟多种传感器损坏场景,确保数据生成的准确性和一致性。此外,MSC-Bench 还面临如何设计有效的评估指标以量化模型鲁棒性的挑战,尤其是在多传感器数据损坏的复杂场景下,模型的性能表现往往难以通过单一指标全面衡量。
常用场景
经典使用场景
Multi-Sensor Corruption Benchmark (MSC-Bench) 主要用于评估多传感器融合模型在自动驾驶感知任务中的鲁棒性,特别是在3D目标检测和高清地图构建任务中。该数据集通过模拟16种不同类型的传感器损坏场景,包括天气影响(如雾、雪)、传感器故障(如相机崩溃、帧丢失)以及传感器间的不对齐问题,为研究人员提供了一个全面的测试平台。通过在这些损坏条件下评估模型的性能,MSC-Bench能够揭示多传感器融合模型在实际复杂环境中的潜在弱点。
实际应用
MSC-Bench的实际应用场景主要集中在自动驾驶领域。通过模拟各种传感器损坏情况,该数据集能够帮助自动驾驶系统开发者在真实世界中应对复杂的驾驶环境。例如,在恶劣天气条件下(如大雾或大雪),传感器的性能可能会显著下降,MSC-Bench提供的数据可以帮助开发者优化传感器融合算法,确保系统在极端条件下仍能保持高精度的感知能力。此外,该数据集还可用于测试自动驾驶系统在传感器故障或数据丢失时的恢复能力,从而提高系统的整体可靠性。
衍生相关工作
MSC-Bench的推出催生了一系列相关研究工作,特别是在多传感器融合模型的鲁棒性优化方面。基于该数据集的研究成果,许多学者提出了改进的融合算法,如BEVFusion、DeepInteraction和TransFusion等,这些方法在应对传感器损坏和恶劣环境条件时表现出更强的鲁棒性。此外,MSC-Bench还为高清地图构建任务提供了新的研究方向,推动了如MapTR、HIMap等模型的发展。这些衍生工作不仅扩展了MSC-Bench的应用范围,还为自动驾驶感知系统的实际部署提供了更多技术保障。
以上内容由遇见数据集搜集并总结生成


