visual_dm_control
收藏Hugging Face2025-05-27 更新2025-05-28 收录
下载链接:
https://huggingface.co/datasets/EpicPinkPenguin/visual_dm_control
下载链接
链接失效反馈官方服务:
资源简介:
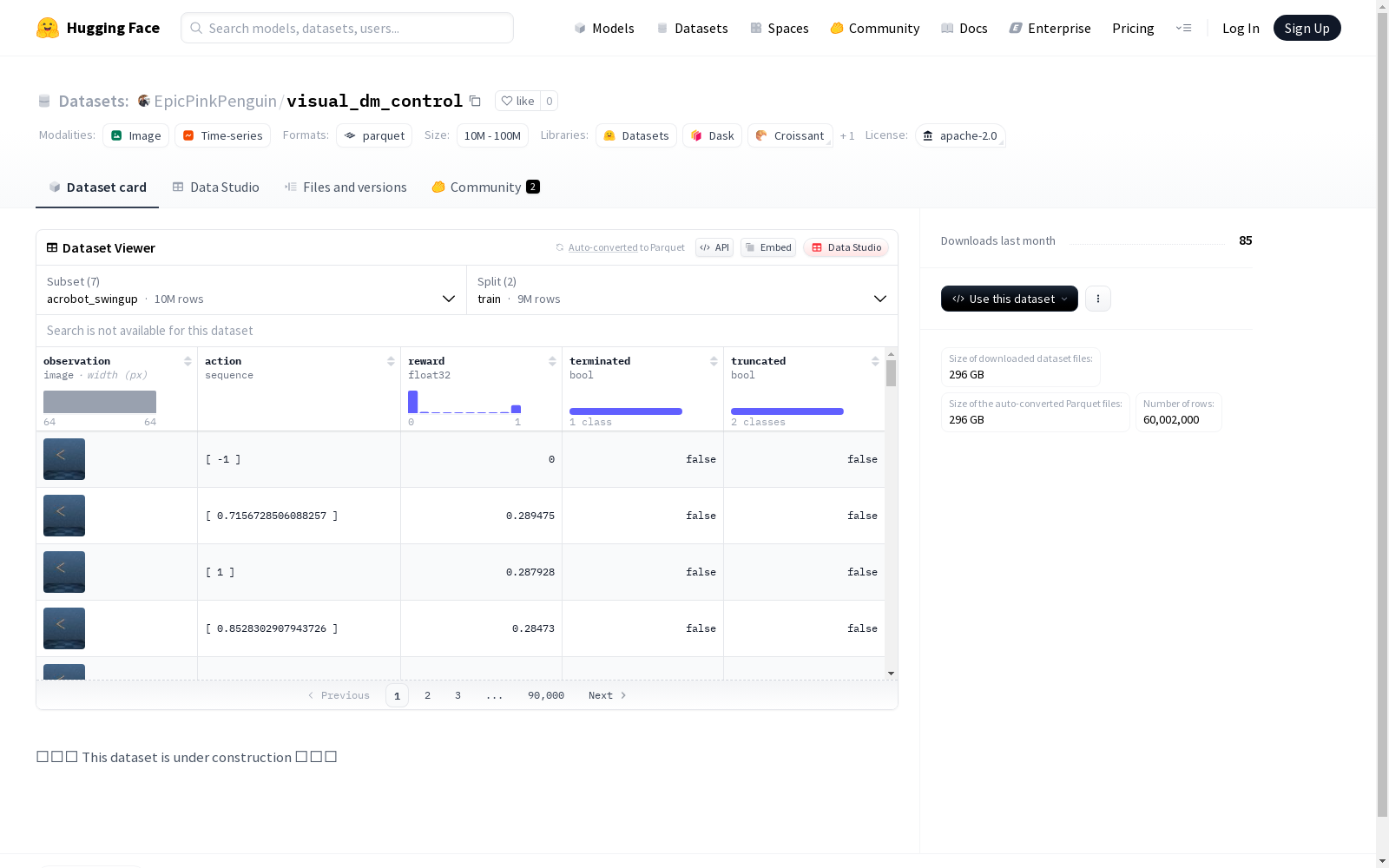
Visual DeepMind Control 数据集包含了多个控制任务,每个任务都有对应的配置。数据集中的特征包括RGB模式的图像观察值、浮点数动作序列、浮点数奖励以及表示任务是否终止的布尔值。数据集分为训练集和测试集,且每个配置都有详细的数据大小和示例数量信息。数据集目前处于构建阶段。
创建时间:
2025-05-22
原始信息汇总
Visual DeepMind Control 数据集概述
基本信息
- 许可证: Apache-2.0
- 数据集名称: Visual DeepMind Control
- 状态: 正在构建中(Under construction)
数据集配置
数据集包含以下7个配置:
1. acrobot_swingup
- 特征:
- observation: RGB图像
- action: 浮点序列(长度1)
- reward: 浮点数
- terminated: 布尔值
- truncated: 布尔值
- 数据分割:
- train: 9,000,000样本(47.94 GB)
- test: 1,000,000样本(5.33 GB)
- 下载大小: 53.33 GB
- 数据集大小: 53.26 GB
2. cartpole_balance
- 特征:
- observation: RGB图像
- action: 浮点序列(长度1)
- reward: 浮点数
- terminated: 布尔值
- truncated: 布尔值
- 数据分割:
- train: 9,000,000样本(43.94 GB)
- test: 1,000,000样本(4.88 GB)
- 下载大小: 48.33 GB
- 数据集大小: 48.83 GB
3. cup_catch
- 特征:
- observation: RGB图像
- action: 浮点序列(长度2)
- reward: 浮点数
- terminated: 布尔值
- truncated: 布尔值
- 数据分割:
- train: 9,000,000样本(38.32 GB)
- test: 1,000,000样本(4.26 GB)
- 下载大小: 42.66 GB
- 数据集大小: 42.58 GB
4. finger_turn_easy
- 特征:
- observation: RGB图像
- action: 浮点序列(长度2)
- reward: 浮点数
- terminated: 布尔值
- truncated: 布尔值
- 数据分割:
- train: 9,000,000样本(44.11 GB)
- test: 1,000,000样本(4.90 GB)
- 下载大小: 49.04 GB
- 数据集大小: 49.00 GB
5. finger_turn_hard
- 特征:
- observation: RGB图像
- action: 浮点序列(长度2)
- reward: 浮点数
- terminated: 布尔值
- truncated: 布尔值
- 数据分割:
- train: 9,000,000样本(43.27 GB)
- test: 1,000,000样本(4.81 GB)
- 下载大小: 48.12 GB
- 数据集大小: 48.08 GB
6. hopper_hop
- 特征:
- observation: RGB图像
- action: 浮点序列(长度4)
- reward: 浮点数
- terminated: 布尔值
- truncated: 布尔值
- 数据分割:
- train: 9,000,000样本(49.39 GB)
- test: 1,000,000样本(5.49 GB)
- 下载大小: 54.92 GB
- 数据集大小: 54.88 GB
7. walker_walk
- 特征:
- observation: RGB图像
- action: 浮点序列(长度6)
- reward: 浮点数
- terminated: 布尔值
- truncated: 布尔值
- 数据分割:
- train: 1,000样本(5.51 MB)
- test: 1,000样本(5.52 MB)
- 下载大小: 11.05 MB
- 数据集大小: 11.03 MB
搜集汇总
数据集介绍
构建方式
Visual DeepMind Control数据集通过模拟物理环境中的多种控制任务构建而成,涵盖了从简单到复杂的多种机器人控制场景。每个任务配置均包含高维度的RGB图像观测数据、连续动作空间、即时奖励信号以及终止标志,数据采集过程在高度可控的仿真环境中完成。训练集与测试集按照9:1的比例划分,确保了模型开发与评估的可靠性。
特点
该数据集以视觉输入为核心特征,所有观测数据均为RGB格式的图像序列,逼真地模拟了真实世界的视觉感知挑战。不同任务的动作维度从1维到6维不等,体现了从基础控制到复杂操作的递进性。每个样本包含完整的强化学习要素(状态-动作-奖励-终止),特别适合研究基于视觉的深度强化学习算法。数据规模庞大,单个任务训练集可达900万样本,为模型训练提供了充分的数据支持。
使用方法
研究人员可通过HuggingFace平台直接加载特定任务配置(如cartpole_balance或hopper_hop),数据集自动划分为训练集和测试集。典型使用场景包括视觉强化学习算法的端到端训练,其中观测图像作为输入,连续动作为输出。由于数据已标准化处理,用户可专注于模型架构设计与超参数调优。对于跨任务研究,多个配置可并行加载以验证算法的泛化能力。
背景与挑战
背景概述
Visual DeepMind Control数据集由DeepMind团队构建,旨在推动基于视觉的强化学习研究。该数据集以物理仿真环境为基础,涵盖多种机器人控制任务,如倒立摆平衡、手指旋转等,通过RGB图像观测与动作序列的对应关系,为研究视觉-动作映射提供了丰富资源。其核心研究问题聚焦于如何从高维视觉输入中提取有效特征,实现精确的运动控制,对机器人学与人工智能的交叉领域具有重要影响。
当前挑战
该数据集面临的主要挑战包括:在领域问题层面,高维视觉输入与低维动作空间的对齐存在显著难度,且动态环境中光照、遮挡等因素增加了视觉表征学习的复杂性;在构建过程中,大规模物理仿真数据的生成需要消耗巨额计算资源,而不同任务间状态-动作对的平衡性也需精心设计以确保数据质量。此外,跨任务泛化能力的评估体系尚未完善,这对基准的建立提出了更高要求。
常用场景
经典使用场景
Visual DeepMind Control(visual_dm_control)数据集在强化学习领域具有重要地位,尤其适用于基于视觉输入的连续控制任务研究。该数据集通过模拟多种物理环境(如倒立摆平衡、机械臂操作等),为算法提供了丰富的视觉观察空间和连续动作空间。研究者可利用其高维视觉输入和精确的物理仿真特性,探索深度强化学习在复杂环境中的泛化能力与样本效率问题。
衍生相关工作
基于该数据集衍生了多项里程碑式研究,包括视觉预测模型PlaNet、跨域策略迁移算法SAC-X等。DeepMind提出的Dreamer系列世界模型将该数据集作为核心验证基准,推动了模型基强化学习的发展。后续研究进一步扩展了其在元学习、分层强化学习等方向的应用,形成了完整的视觉控制研究体系。
数据集最近研究
最新研究方向
在强化学习与计算机视觉交叉领域,Visual DeepMind Control数据集正推动基于视觉感知的连续控制策略研究。该数据集以高维RGB图像作为观测输入,结合多任务物理引擎环境,为模仿学习与元强化学习算法提供了丰富的训练场景。近期研究聚焦于跨任务迁移能力提升,通过共享视觉表征解决样本效率低下的核心难题,在机器人抓取、平衡控制等实际任务中展现出重要应用潜力。
以上内容由遇见数据集搜集并总结生成


