udacity-binaries
收藏Hugging Face2025-11-18 更新2025-11-19 收录
下载链接:
https://huggingface.co/datasets/maxim-igenbergs/udacity-binaries
下载链接
链接失效反馈官方服务:
资源简介:
Udacity模拟器二进制文件数据集,包含适用于Jungle地图和Generated Roads地图的Linux和macOS平台(包括Intel和Apple Silicon架构)的二进制文件,以及用于构建Jungle二进制的Unity项目。
创建时间:
2025-11-08
原始信息汇总
Udacity Simulator Binaries 数据集概述
数据集基本信息
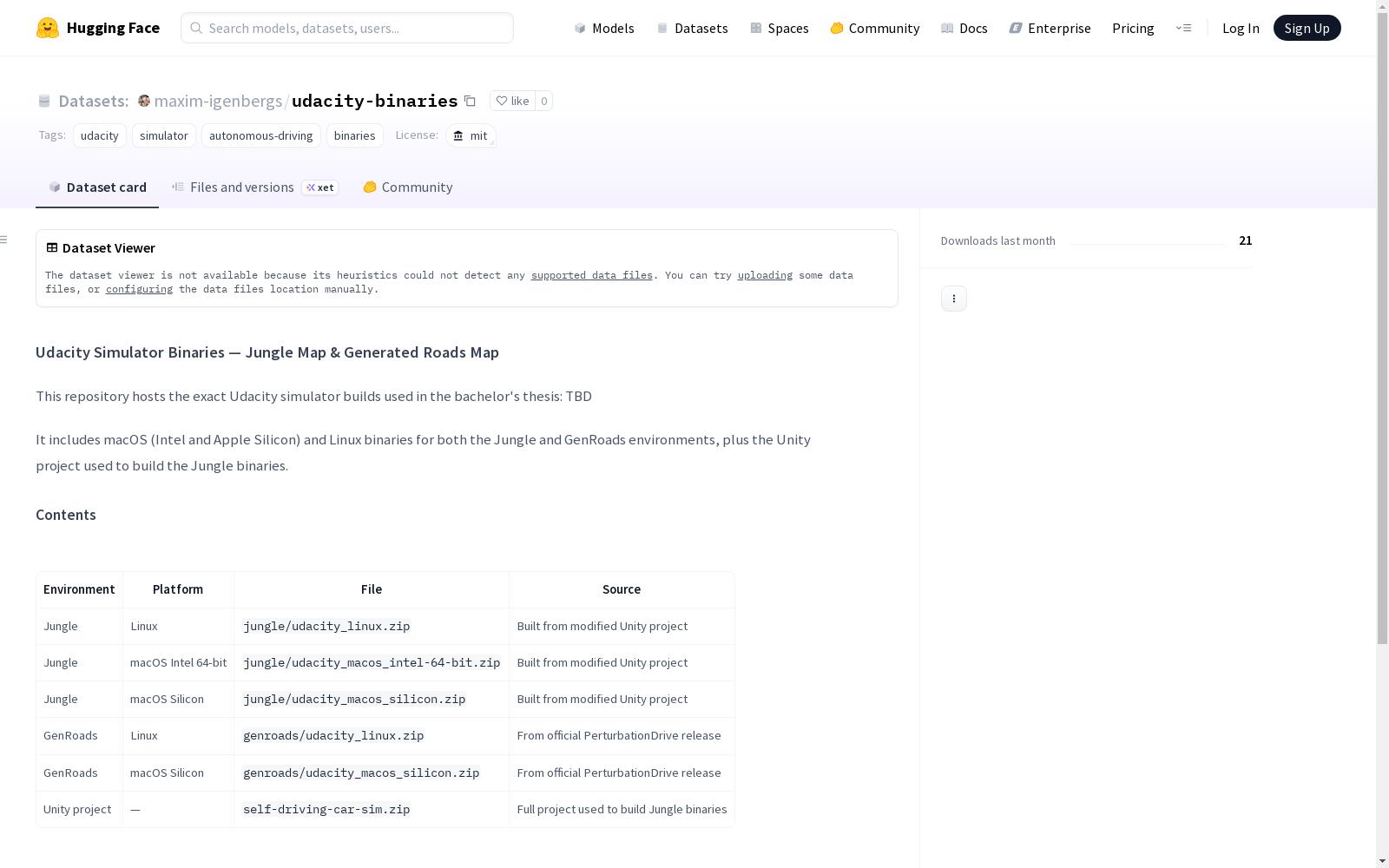
- 数据集名称:Udacity Simulator Binaries — Jungle Map & Generated Roads Map
- 许可证:MIT
- 标签:udacity, simulator, autonomous-driving, binaries
数据集内容
环境类型
- Jungle环境:包含Linux、macOS Intel 64位和macOS Silicon平台的二进制文件
- GenRoads环境:包含Linux和macOS Silicon平台的二进制文件
- Unity项目:包含用于构建Jungle二进制文件的完整项目
文件详情
Jungle环境文件
- Linux平台:
jungle/udacity_linux.zip - macOS Intel 64位平台:
jungle/udacity_macos_intel-64-bit.zip - macOS Silicon平台:
jungle/udacity_macos_silicon.zip
GenRoads环境文件
- Linux平台:
genroads/udacity_linux.zip - macOS Silicon平台:
genroads/udacity_macos_silicon.zip
Unity项目文件
- 完整项目:
self-driving-car-sim.zip
数据来源
- Jungle环境:基于修改的Unity项目构建
- GenRoads环境:来自官方PerturbationDrive发布版本
- Unity项目:用于构建Jungle二进制文件的完整项目
许可证信息
- Jungle模拟器修改和构建脚本:MIT许可证
- 原始模拟器:© Udacity,开放教育用途
- GenRoads二进制文件:按照PerturbationDrive项目分发
搜集汇总
数据集介绍
构建方式
作为自动驾驶仿真领域的重要资源,该数据集通过系统整合多平台二进制文件构建而成。其核心组件包含基于修改版Unity项目编译的Jungle环境仿真器,覆盖Linux与macOS两大操作系统架构;同时收录了源自PerturbationDrive官方发布的GenRoads环境可执行文件。构建过程中严格遵循平台兼容性标准,针对苹果芯片与英特尔处理器分别提供优化版本,并完整保留了原始Unity工程文件以供验证。
特点
该数据集最显著的特征在于其双环境并行架构:Jungle地图通过自定义Unity项目实现高自由度修改,而GenRoads则提供经过学术验证的标准化测试场景。所有二进制文件均保持与原始研究环境的高度一致性,支持跨平台无缝部署。数据集采用模块化存储结构,明确标注各文件来源与编译环境,同时遵循分层许可协议——修改部分采用MIT许可,原始组件保留教育使用权限。
使用方法
研究人员可根据目标平台直接解压对应压缩文件启动仿真环境,Linux用户获取udacity_linux.zip,macOS用户则按芯片架构选择相应版本。对于需要自定义扩展的研究,可通过self-driving-car-sim.zip导入完整Unity工程进行二次开发。使用GenRoads组件时需遵循其原始项目的许可条款,所有仿真器均可与主流自动驾驶算法框架对接,为感知决策模块提供标准化测试平台。
背景与挑战
背景概述
自动驾驶仿真技术作为智能交通系统的关键组成部分,其发展依赖于高保真虚拟环境的构建。Udacity仿真器二进制文件由教育机构Udacity主导开发,旨在为自动驾驶算法验证提供可复现的测试平台。该数据集包含丛林地图与生成道路地图两种环境,支持跨平台部署,其核心研究问题聚焦于模拟现实驾驶场景的多样性与复杂性,通过开源协作模式推动自动驾驶技术的标准化进程。
当前挑战
自动驾驶仿真领域面临的核心挑战在于如何平衡场景真实性与计算效率,同时确保不同硬件平台的兼容性。数据集构建过程中需克服多平台二进制文件适配难题,包括针对苹果芯片架构的优化与Linux环境稳定性保障。此外,原始仿真器的教育用途许可与衍生版本的版权协调,以及生成道路地图从第三方项目集成的技术一致性,均为构建过程带来法律与工程层面的双重考验。
常用场景
经典使用场景
在自动驾驶仿真研究领域,该数据集为算法验证提供了标准化的虚拟测试平台。其包含的丛林地图和生成道路地图能够模拟复杂多变的驾驶环境,研究人员可在此环境中训练感知模型、测试路径规划算法,并评估车辆在极端条件下的控制策略。这种闭环仿真系统显著降低了实车实验的成本与风险。
实际应用
该仿真器已被广泛应用于自动驾驶教学与产业研发环节。教育机构利用其开展无人驾驶课程实践,工程师则通过生成道路地图进行算法迭代优化。其跨平台特性支持团队协作开发,而丛林环境的复杂地形更为高级驾驶辅助系统的极限测试提供了重要基准。
衍生相关工作
基于该数据集衍生的经典研究包括PerturbationDrive项目中的对抗样本生成工作,其通过环境扰动测试自动驾驶系统的脆弱性。众多团队利用该仿真器开发了端到端驾驶模型,并在模仿学习、强化学习等领域产出了重要成果,持续推动着仿真驱动自动驾驶研究的技术演进。
以上内容由遇见数据集搜集并总结生成


