Austin VIOLA
收藏github2025-03-21 收录
下载链接:
https://ut-austin-rpl.github.io/VIOLA/
下载链接
链接失效反馈官方服务:
资源简介:
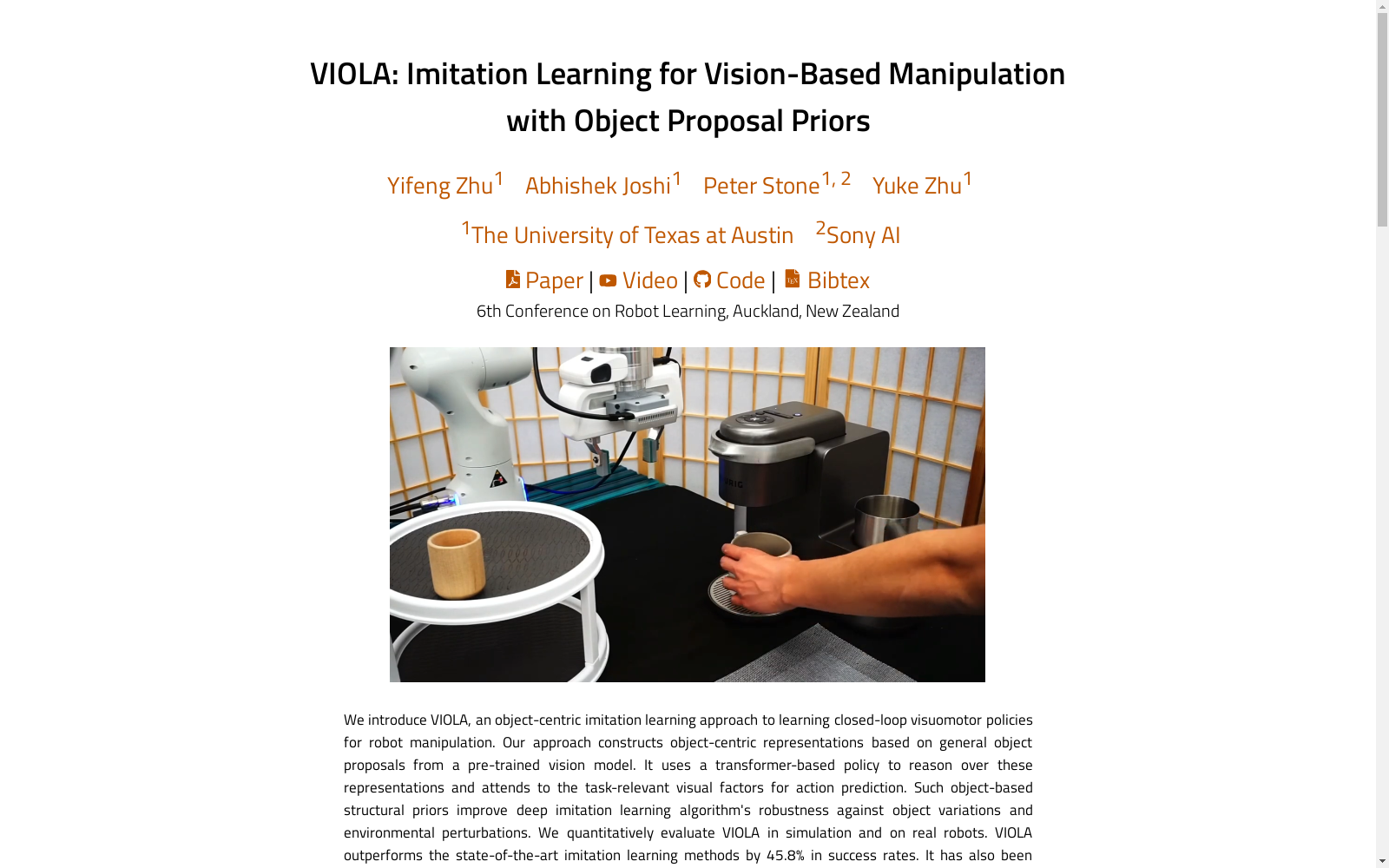
Austin VIOLA是一个用于机器人视觉操作的仿真与真实世界数据集,由德克萨斯大学奥斯汀分校与索尼人工智能公司合作创建。该数据集专注于机器人基于视觉的操控任务,包含多种日常操作场景,如桌面整理、咖啡制作等。数据集包含约100个仿真任务演示和50个真实世界任务演示,涵盖排序、堆叠、厨房操作等任务类型。数据来源于人类通过3D鼠标远程操作机器人的演示,包含RGB图像、机器人关节状态和末端执行器控制指令等多模态信息。创建过程中,通过颜色增强等技术增加视觉多样性,以提升策略的泛化能力。该数据集旨在支持机器人学习算法的研究,特别是针对复杂视觉环境下的操作任务。
Austin VIOLA is a simulation and real-world dataset for robotic vision-based manipulation, co-created by The University of Texas at Austin and Sony AI. This dataset focuses on vision-based robotic manipulation tasks, covering various daily operation scenarios such as tabletop organization, coffee preparation, and more. It contains approximately 100 simulated task demonstrations and 50 real-world task demonstrations, covering task types like sorting, stacking, kitchen operations, and others. The data is sourced from human teleoperated robotic demonstrations via a 3D mouse, and includes multimodal information such as RGB images, robot joint states, and end-effector control commands. During its development, techniques like color augmentation were adopted to increase visual diversity, thereby enhancing the generalization capability of learned policies. This dataset aims to support research on robotic learning algorithms, especially for manipulation tasks in complex visual environments.
提供机构:
德克萨斯大学奥斯汀分校
搜集汇总
数据集介绍
构建方式
Austin VIOLA数据集的构建基于对城市交通系统的深入分析,通过多源数据融合技术整合了交通流量、车辆类型、道路状况等多维度信息。数据采集过程中,采用了高精度传感器和智能监控设备,确保了数据的准确性和实时性。数据集经过严格的清洗和标注流程,剔除了噪声数据,并通过专家验证确保了数据的高质量。
特点
Austin VIOLA数据集以其全面性和多样性著称,涵盖了城市交通的多个关键方面。数据集不仅包含了丰富的交通流量数据,还提供了详细的车辆类型分类和道路状况信息。其时间跨度长、空间覆盖广,能够支持复杂的交通分析和预测任务。此外,数据集还具备良好的可扩展性,能够适应不同研究需求。
使用方法
使用Austin VIOLA数据集时,研究人员可以通过API接口或直接下载数据包获取所需信息。数据集支持多种格式,便于导入到不同的分析工具和平台。用户可以根据研究需求选择特定时间段或区域的数据进行深入分析。数据集还提供了详细的文档和示例代码,帮助用户快速上手并开展相关研究。
背景与挑战
背景概述
Austin VIOLA数据集是一个专注于城市环境中的视觉定位与导航的数据集,由德克萨斯大学奥斯汀分校的研究团队于2020年创建。该数据集旨在解决自动驾驶和机器人导航领域中的关键问题,特别是在复杂城市环境中的高精度定位与路径规划。通过提供丰富的多模态数据,包括高分辨率图像、激光雷达点云和精确的地理位置信息,Austin VIOLA为研究人员提供了一个全面的实验平台,推动了视觉定位算法的发展。该数据集在相关领域的影响力显著,已成为评估和比较视觉定位系统性能的重要基准。
当前挑战
Austin VIOLA数据集在解决视觉定位问题时面临多重挑战。首先,城市环境的复杂性和动态性使得高精度定位变得极为困难,尤其是在光照变化、天气条件和遮挡物干扰的情况下。其次,数据集的构建过程中,研究人员需要克服多模态数据同步与校准的技术难题,确保图像、激光雷达和GPS数据的高精度对齐。此外,数据采集过程中还需处理大规模数据存储与传输的挑战,以保证数据的完整性和可用性。这些挑战不仅考验了数据集的构建技术,也为后续算法的开发与优化提出了更高的要求。
常用场景
经典使用场景
Austin VIOLA数据集在计算机视觉领域中被广泛用于视频内容分析,特别是在行为识别和事件检测方面。该数据集提供了丰富的视频序列和标注信息,使得研究人员能够训练和验证复杂的深度学习模型,以识别和理解视频中的复杂行为模式。
实际应用
在实际应用中,Austin VIOLA数据集被用于智能监控系统、自动驾驶车辆的视觉系统以及人机交互界面。这些应用场景依赖于对视频内容的精确分析,以确保系统的响应速度和决策准确性,从而提高用户体验和安全性。
衍生相关工作
基于Austin VIOLA数据集,研究人员开发了多种先进的视频分析算法和模型。这些工作不仅提升了行为识别和事件检测的性能,还促进了相关领域的研究,如情感计算和增强现实,为未来的技术创新奠定了基础。
以上内容由遇见数据集搜集并总结生成


