Accid3nD
收藏arXiv2025-03-15 更新2025-03-20 收录
下载链接:
https://accident-dataset.github.io/
下载链接
链接失效反馈官方服务:
资源简介:
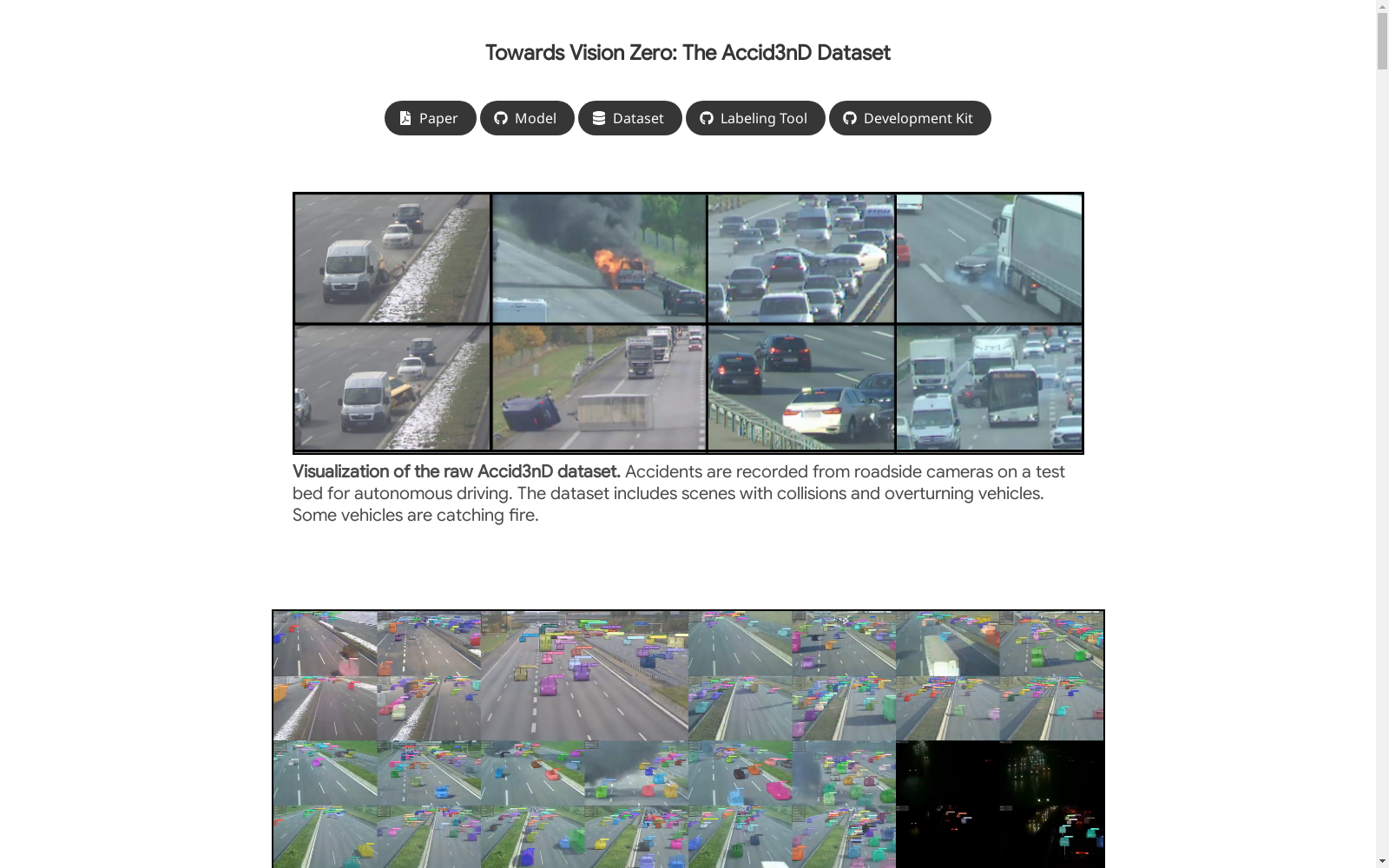
Accid3nD数据集是由慕尼黑工业大学等机构创建的,包含在不同天气和光照条件下记录的真实的公路交通事故场景。该数据集共有111,945个标记帧,通过四个路边相机和LiDAR在25Hz的频率下收集,包含2,634,233个标记的2D边界框、实例掩模和3D边界框,以及跟踪ID。数据集涵盖六种对象类别,并以OpenLABEL格式提供,支持事故检测、跟踪和事故分析等多种任务。
The Accid3nD Dataset was created by institutions including the Technical University of Munich and other relevant organizations. It contains real-world highway traffic accident scenarios recorded under diverse weather and lighting conditions. Comprising 111,945 labeled frames, the dataset was collected at a frame rate of 25 Hz using four roadside cameras and LiDAR sensors. It includes 2,634,233 labeled 2D bounding boxes, instance masks, 3D bounding boxes, as well as tracking IDs. The dataset covers six object categories and is provided in the OpenLABEL format, supporting multiple tasks such as accident detection, tracking, and accident analysis.
提供机构:
慕尼黑工业大学
创建时间:
2025-03-15
搜集汇总
数据集介绍
构建方式
Accid3nD数据集的构建基于高速公路上的真实事故场景,通过四个路边摄像头和LiDAR传感器以25Hz的频率采集数据。数据采集过程中,系统通过规则基础的事故检测框架优先捕捉事故和接近事故的事件。所有数据经过匿名化处理,确保隐私保护。标注过程采用3D BAT工具箱,结合2D和3D对象检测器以及PolyMOT跟踪器,生成高质量的2D和3D边界框、实例分割掩码和轨迹信息。
使用方法
Accid3nD数据集可用于训练和评估事故检测模型,支持基于规则和基于学习的检测方法。研究人员可以通过数据集提供的开发工具包进行数据预处理、模型训练和评估。数据集还支持多传感器数据融合,用于创建交通场景的数字孪生,帮助开发更安全的自动驾驶系统。此外,数据集可用于事故分析,重建事故序列,识别事故原因,如超速、交通拥堵或驾驶员反应迟缓等。
背景与挑战
背景概述
Accid3nD数据集是由慕尼黑工业大学、加州大学默塞德分校等多家研究机构联合创建的一个专注于交通事故场景的3D感知数据集。该数据集于2025年发布,旨在为自动驾驶和智能交通系统提供高质量的真实世界事故数据,以支持Vision Zero(零事故愿景)目标的实现。数据集包含来自路边摄像头和LiDAR的111,945帧标注数据,涵盖了高速公路上不同天气和光照条件下的车辆碰撞、翻车等事故场景。Accid3nD的独特之处在于其提供了2D和3D的边界框标注、实例分割掩码以及跟踪ID,使其成为首个专注于真实事故场景的3D数据集。该数据集不仅支持传统的计算机视觉任务,如目标检测和跟踪,还为事故分析和预测提供了丰富的数据基础。
当前挑战
Accid3nD数据集在构建和应用过程中面临多重挑战。首先,真实事故数据的采集极为困难,事故本身具有罕见性和不可预测性,且涉及高风险,难以在自然驾驶环境中模拟。其次,数据标注的复杂性较高,尤其是在3D场景中,如何准确标注事故中的车辆位置、姿态和运动轨迹是一个技术难题。此外,多传感器数据的融合与同步也带来了挑战,尤其是在恶劣天气条件下,传感器的精度和可靠性可能受到影响。在应用层面,如何利用该数据集训练出能够准确检测和预测事故的模型,尤其是在复杂交通场景中,仍然是一个亟待解决的问题。最后,数据集的多样性和覆盖范围仍需扩展,以应对更多类型的事故和交通环境。
常用场景
经典使用场景
Accid3nD数据集在自动驾驶和智能交通系统的研究中具有广泛的应用场景,尤其是在事故检测和预防领域。该数据集通过多传感器融合技术,结合摄像头、雷达和LiDAR的数据,提供了高精度的3D标注信息,能够支持复杂交通场景下的实时事故检测。其经典使用场景包括高速公路上的车辆碰撞、翻车、火灾等事故的自动识别与分析,帮助研究人员开发更安全、更可靠的自动驾驶系统。
解决学术问题
Accid3nD数据集解决了自动驾驶领域中的长尾事件数据稀缺问题,尤其是真实世界中的交通事故数据。现有的数据集大多集中在正常驾驶场景,而Accid3nD专注于罕见且危险的事故场景,提供了丰富的3D标注和跟踪信息。这使得研究人员能够更好地训练和验证事故检测、轨迹预测和风险评估模型,从而提升自动驾驶系统在复杂交通环境中的安全性和鲁棒性。
实际应用
在实际应用中,Accid3nD数据集可以用于开发智能交通基础设施中的事故检测系统。通过实时监控交通流量并分析车辆行为,系统能够在事故发生时迅速发出警报,缩短应急响应时间,减少人员伤亡。此外,该数据集还可用于交通管理部门的事故分析和交通流优化,帮助制定更有效的交通安全策略。
数据集最近研究
最新研究方向
近年来,Accid3nD数据集在自动驾驶和智能交通系统领域引起了广泛关注,尤其是在事故检测与预防方面。该数据集通过多传感器融合技术,结合摄像头、雷达和LiDAR数据,提供了真实世界高速公路上事故场景的3D标注,涵盖了多种天气和光照条件下的复杂交通事件。研究热点主要集中在基于规则和学习的混合事故检测方法,通过实时数字孪生技术对交通场景进行建模,并结合视觉语言模型(VLMs)提升场景理解能力。此外,数据集还支持轨迹预测、协同感知等前沿任务,为自动驾驶系统的安全性提供了重要的数据支持。Accid3nD的发布填补了现有数据集中事故场景标注的空白,推动了自动驾驶技术在长尾事件处理中的进步,为实现‘零愿景’目标提供了强有力的工具。
相关研究论文
- 1Towards Vision Zero: The Accid3nD Dataset慕尼黑工业大学 · 2025年
以上内容由遇见数据集搜集并总结生成


