RECON
收藏arXiv2025-09-30 收录
下载链接:
https://sites.google.com/view/recon-robot/dataset
下载链接
链接失效反馈官方服务:
资源简介:
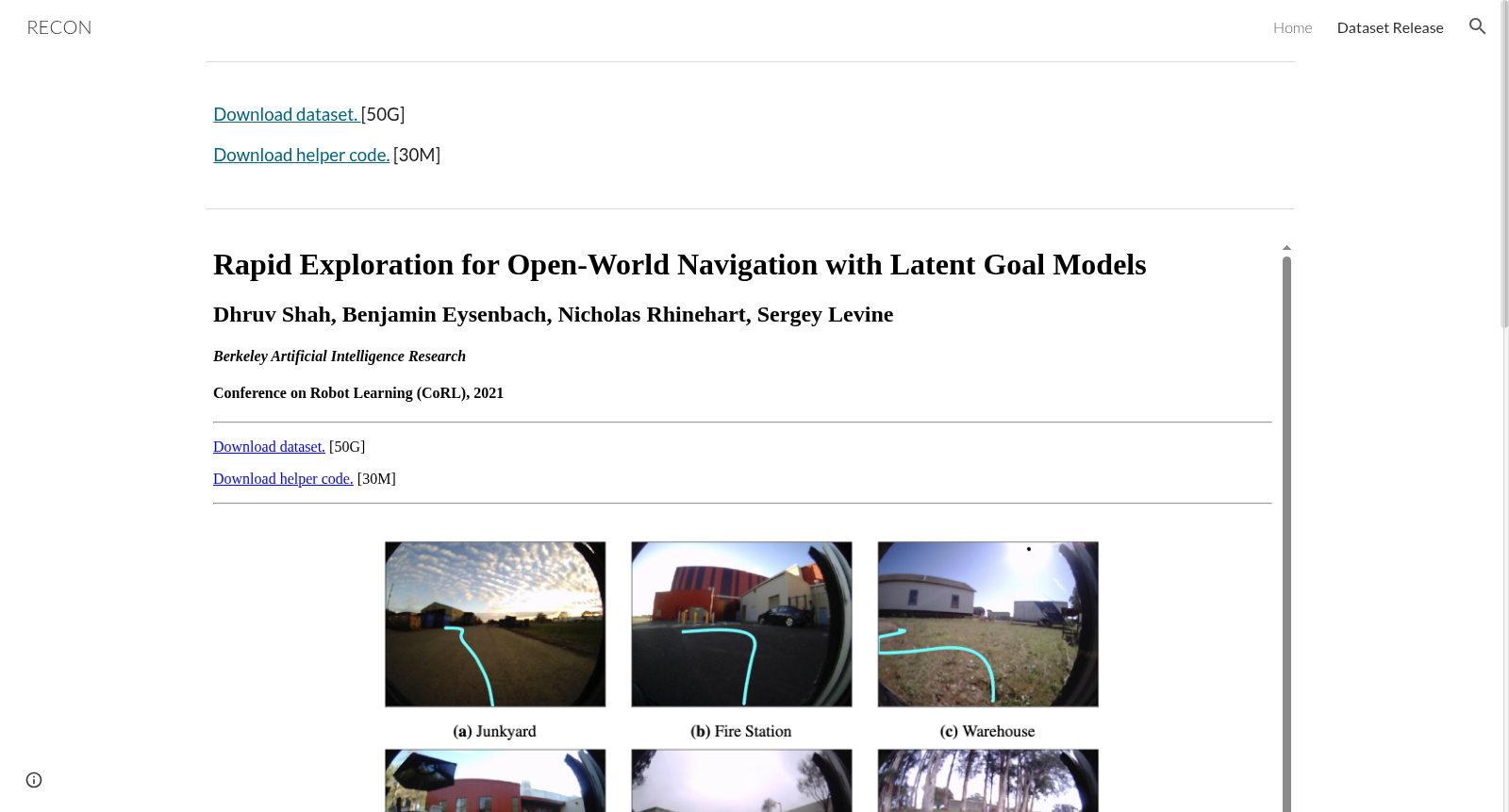
该数据集包含了5000条自我监督的轨迹和观察数据,这些数据是由一个机器人在环境中导航时收集的。该数据集被用于构建视觉导航模型的图表,其中包括在手动操作机器人时收集的图像和GPS数据。规模上,该数据集涵盖了5000条轨迹,其任务是为视觉-语言导航。
This dataset contains 5000 self-supervised trajectories and observational data, collected by a robot while navigating within an environment. It is employed to build visual navigation model benchmarks, and includes images and GPS data gathered via manual robot teleoperation. In terms of scale, this dataset encompasses 5000 trajectories and is tailored for vision-language navigation tasks.
搜集汇总
数据集介绍
背景与挑战
背景概述
RECON数据集是一个50GB规模的数据集,附带30MB的辅助代码,采用MIT许可协议,允许用户自由使用、修改和分发,但需提供适当署名。
以上内容由遇见数据集搜集并总结生成


