QueensCAMP
收藏arXiv2024-10-16 更新2024-10-18 收录
下载链接:
https://larocs.github.io/queenscamp-dataset
下载链接
链接失效反馈官方服务:
资源简介:
QueensCAMP数据集是由巴西坎皮纳斯大学计算研究所和加拿大女王大学计算学院共同创建的RGB-D数据集,专门用于评估视觉SLAM系统的鲁棒性。该数据集包含28,523张RGB图像和199,661张带有模拟镜头故障的图像,涵盖动态对象、运动模糊和光照变化等复杂场景。数据集的创建过程中,使用了Vicon运动捕捉系统和Intel RealSense D435深度相机,确保了数据的高质量和真实性。QueensCAMP数据集主要应用于机器人视觉SLAM系统的鲁棒性评估,旨在解决现有数据集在复杂环境下的不足,提供更全面的测试条件。
The QueensCAMP dataset is an RGB-D dataset jointly created by the Institute of Computing, University of Campinas, Brazil, and the School of Computing, Queen's University, Canada, specifically designed for evaluating the robustness of visual SLAM systems. It contains 28,523 RGB images and 199,661 images with simulated lens failures, covering complex scenarios including dynamic objects, motion blur, and illumination variations. The Vicon motion capture system and Intel RealSense D435 depth camera were employed during the dataset construction to ensure the high quality and authenticity of the data. The QueensCAMP dataset is primarily applied to the robustness evaluation of robotic visual SLAM systems, aiming to address the shortcomings of existing datasets in complex environments and provide more comprehensive test conditions.
提供机构:
巴西坎皮纳斯大学计算研究所
创建时间:
2024-10-16
原始信息汇总
QueensCAMP Dataset
概述
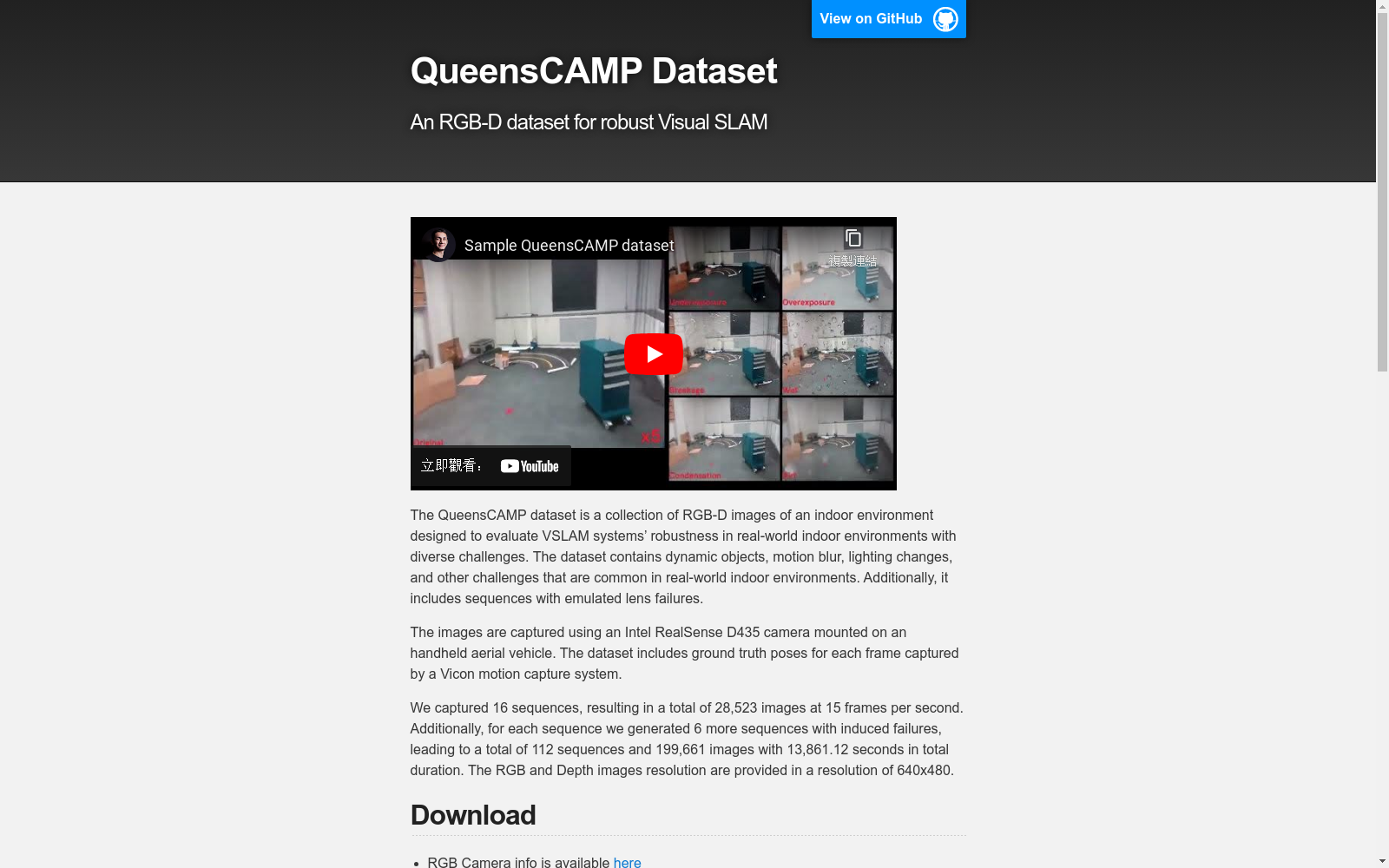
QueensCAMP Dataset 是一个用于评估视觉SLAM系统在真实室内环境中鲁棒性的RGB-D图像数据集。该数据集包含动态物体、运动模糊、光照变化等常见挑战,以及模拟镜头故障的序列。
数据采集
- 设备:使用Intel RealSense D435相机,安装在手持飞行器上。
- 环境:室内环境。
- 帧率:15帧每秒。
- 分辨率:RGB图像为1920x1080,深度图像为640x480。
数据集规模
- 序列数量:16个原始序列,每个序列生成6个带有故障的序列,总计112个序列。
- 图像数量:总计28,523张原始图像,199,661张包含故障的图像。
- 总时长:13,861.12秒。
下载
序列下载
- 01:完整序列 (6.0 GB) | Bag (0.5 GB)
- 02:完整序列 (8.1 GB) | Bag (0.7 GB)
- 03:完整序列 (6.9 GB) | Bag (0.6 GB)
- 04:完整序列 (6.9 GB) | Bag (0.6 GB)
- 05:完整序列 (9.2 GB) | Bag (0.7 GB)
- 06:完整序列 (9.0 GB) | Bag (0.7 GB)
- 07:完整序列 (7.7 GB) | Bag (0.6 GB)
- 08:完整序列 (5.2 GB) | Bag (0.4 GB)
- 09:完整序列 (4.2 GB) | Bag (0.4 GB)
- 10:完整序列 (5.7 GB) | Bag (0.5 GB)
- 11:完整序列 (4.7 GB) | Bag (0.4 GB)
- 12:完整序列 (4.6 GB) | Bag (0.4 GB)
- 13:完整序列 (4.7 GB) | Bag (0.4 GB)
- 14:完整序列 (3.4 GB) | Bag (0.4 GB)
- 15:完整序列 (6.4 GB) | Bag (0.6 GB)
- 16:完整序列 (4.2 GB) | Bag (0.4 GB)
数据集工具
用于后处理和插入故障的脚本可在QueensCAMP Dataset Tools仓库中找到。
引用
如果使用此数据集进行研究,请引用以下论文: plaintext @misc{bruno2024queenscamprgbddatasetrobust, title={QueensCAMP: an RGB-D dataset for robust Visual SLAM}, author={Hudson M. S. Bruno and Esther L. Colombini and Sidney N. Givigi Jr au2}, year={2024}, eprint={2410.12520}, archivePrefix={arXiv}, primaryClass={cs.CV}, url={https://arxiv.org/abs/2410.12520}, }
搜集汇总
数据集介绍
构建方式
QueensCAMP数据集的构建基于室内环境的实际采集,利用Vicon运动捕捉系统获取精确的六自由度位置数据。采集过程中,使用配备NVIDIA Jetson Nano和Intel RealSense D435深度相机的Tarot 680 Pro碳纤维六轴飞行器,在不同速度下拍摄图像。此外,通过引入动态对象、变化光照和运动模糊等复杂场景,以及模拟镜头故障如镜头污垢、冷凝、曝光不足和过度曝光,增强了数据集的真实性和挑战性。所有采集的RGB和深度图像均经过对齐处理,并提供了开源脚本用于数据后处理和故障模拟。
使用方法
QueensCAMP数据集适用于评估和改进视觉同步定位与地图构建(VSLAM)算法。研究者可以使用数据集中的RGB-D图像和六自由度轨迹数据,结合开源的ORB-SLAM2和TartanVO算法进行实验。通过对比算法在原始图像和模拟故障图像中的表现,可以量化评估算法的鲁棒性。此外,数据集提供的故障模拟脚本允许用户自定义故障类型和强度,进一步扩展数据集的应用范围,促进VSLAM系统在复杂环境中的实际应用。
背景与挑战
背景概述
视觉同步定位与地图构建(VSLAM)技术在机器人应用中占据核心地位,然而其在复杂环境下的鲁棒性仍面临挑战。QueensCAMP数据集由Hudson M. S. Bruno、Esther L. Colombini和Sidney N. Givigi Jr.于2024年创建,旨在评估VSLAM系统在恶劣条件下的表现。该数据集包含真实室内场景的RGB-D图像,涵盖动态物体、运动模糊、光照变化及模拟的相机故障,如镜头污损、冷凝、曝光问题等。通过提供这些复杂场景,QueensCAMP数据集为研究者提供了一个宝贵的工具,以推动VSLAM系统在实际应用中的鲁棒性提升。
当前挑战
QueensCAMP数据集面临的挑战主要集中在两个方面:一是如何有效模拟和评估VSLAM系统在极端条件下的性能,包括低光照、动态环境和相机故障等;二是数据集构建过程中如何确保数据的真实性和多样性,以全面反映实际应用中的复杂情况。此外,数据集还面临如何通过开源工具和脚本,使研究社区能够灵活地引入新的故障模式,从而进一步推动VSLAM算法的鲁棒性研究。
常用场景
经典使用场景
QueensCAMP数据集在视觉同步定位与地图构建(VSLAM)领域中扮演着至关重要的角色。其经典使用场景包括评估VSLAM系统在复杂环境下的鲁棒性,特别是在光照变化、动态物体、运动模糊以及传感器故障等挑战性条件下。通过提供包含真实室内场景的RGB-D图像和模拟的相机故障,该数据集为研究人员提供了一个全面的测试平台,以验证和改进现有VSLAM算法的性能。
解决学术问题
QueensCAMP数据集解决了VSLAM领域中一个长期存在的学术问题,即如何在极端条件下确保算法的鲁棒性。传统的VSLAM算法在面对光照不足、动态环境、运动模糊和传感器故障时往往表现不佳。该数据集通过模拟这些真实世界中的挑战,为研究人员提供了一个评估和改进算法鲁棒性的工具,从而推动了VSLAM技术在实际应用中的可行性和可靠性。
实际应用
在实际应用中,QueensCAMP数据集为机器人导航、自动驾驶和增强现实等领域提供了重要的支持。通过在数据集中模拟各种相机故障和复杂环境条件,研究人员可以开发出更加鲁棒的VSLAM系统,这些系统能够在实际操作中应对各种不可预测的情况,如恶劣天气、设备故障和动态环境变化,从而提高系统的可靠性和安全性。
数据集最近研究
最新研究方向
在机器人视觉同步定位与地图构建(VSLAM)领域,QueensCAMP数据集的最新研究方向聚焦于提升算法在复杂环境中的鲁棒性。该数据集通过引入动态对象、运动模糊、光照变化以及模拟的相机故障(如镜头污损、冷凝、曝光不足和过度曝光),为评估VSLAM系统的鲁棒性提供了丰富的场景。研究者们利用该数据集对传统算法(如ORB-SLAM2)和基于深度学习的算法(如TartanVO)进行了深入测试,发现这些算法在面对模拟的相机故障时性能显著下降。因此,QueensCAMP数据集及其开源工具为开发更鲁棒的VSLAM系统提供了宝贵的资源,推动了该领域在实际应用中的技术进步。
相关研究论文
- 1QueensCAMP: an RGB-D dataset for robust Visual SLAM巴西坎皮纳斯大学计算研究所 · 2024年
以上内容由遇见数据集搜集并总结生成


