LiDAR-Forest Dataset
收藏arXiv2024-02-16 更新2024-06-21 收录
下载链接:
https://lidar-simulate.github.io/LiDAR_simulate/
下载链接
链接失效反馈官方服务:
资源简介:
LiDAR-Forest Dataset是由普渡大学理工学院创建的一个用于林业应用的LiDAR点云模拟数据集。该数据集通过模拟系统生成,包括资产创建、场景生成和LiDAR点云生成三个阶段,能够模拟真实LiDAR传感器在复杂森林环境中的表现。数据集内容丰富,包含不同树种、LiDAR类型和场景生成的自定义选项,适用于树种识别、树干测绘和森林数字孪生等多种林业场景。创建过程中,通过引入物理场景和传感器噪声,以及模拟人类运动,确保了数据集的真实性和高效性。该数据集的应用领域广泛,旨在解决森林监测中的具体问题,如树种识别、树干测量和森林动态模拟,为林业专业人员和教育提供了宝贵的资源。
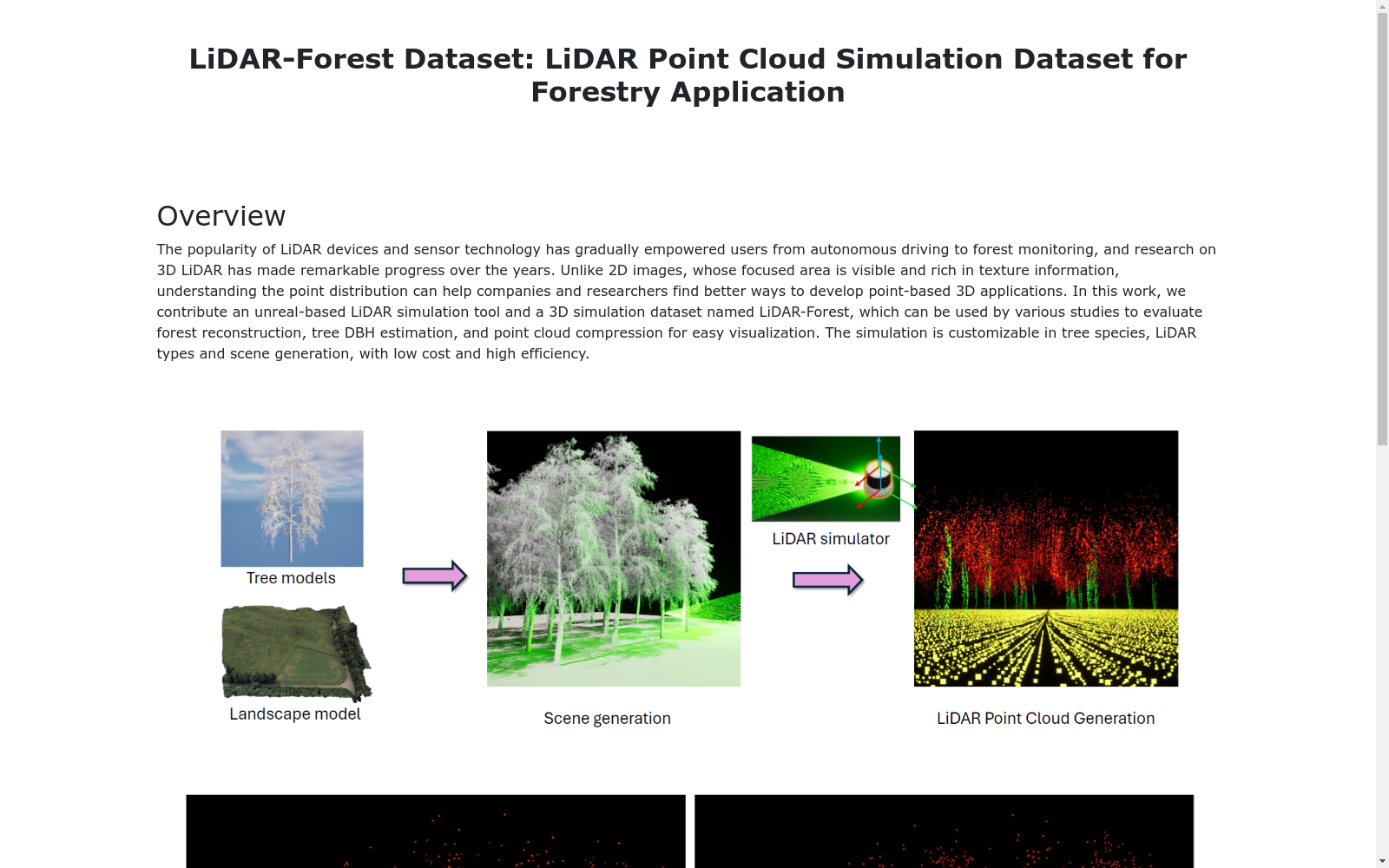
The LiDAR-Forest Dataset is a LiDAR point cloud simulation dataset for forestry applications, created by the College of Engineering at Purdue University. Generated via a simulation system that encompasses three stages: asset creation, scene generation, and LiDAR point cloud generation, this dataset can simulate the performance of real LiDAR sensors in complex forest environments. It features rich content with customizable options for different tree species, LiDAR types, and scene generation, making it applicable to various forestry scenarios such as tree species recognition, trunk surveying and mapping, and forest digital twins. During its creation, physical scenes, sensor noise, and simulated human movement were introduced to ensure the dataset's authenticity and efficiency. This dataset has a wide range of application scenarios, aiming to solve specific problems in forest monitoring including tree species recognition, trunk measurement, and forest dynamic simulation, providing valuable resources for forestry professionals and educational work.
提供机构:
普渡大学理工学院
创建时间:
2024-02-07
搜集汇总
数据集介绍
构建方式
LiDAR-Forest Dataset 是通过一个基于 Unreal Engine 5 的 LiDAR 模拟工具构建的。该工具能够模拟不同类型的 LiDAR 传感器和配置,通过五个模块(数据生成模块、旋转模块、误差模拟模块、人体运动模块和扫描路径模块)生成逼真的 LiDAR 点云数据,这些数据包含了点坐标、叶-木标签、语义标签和实例标签等信息。
特点
该数据集的特点包括:1)高度逼真的点云数据,通过模拟真实的 LiDAR 传感器行为和环境影响生成;2)灵活的配置选项,允许用户自定义 LiDAR 类型、扫描模式和场景复杂性;3)包含无误差标签,适合于训练数据密集型算法并进行准确评估。
使用方法
使用 LiDAR-Forest Dataset 的方法包括:1)下载并解压数据集;2)根据需要选择合适的 LiDAR 传感器类型和配置;3)利用数据集中的点云数据进行模型训练、算法评估或场景重建等任务。
背景与挑战
背景概述
LiDAR-Forest Dataset是由yawen lu等人于近期创建的一个面向林业应用的LiDAR点云模拟数据集。该数据集基于Unreal引擎开发,旨在为林业研究提供一种高效、低成本且准确的LiDAR数据获取方式。LiDAR-Forest通过模拟真实的LiDAR传感器工作原理,生成具有不同树种、LiDAR类型和场景配置的3D模拟数据。该数据集的创建不仅填补了野生森林场景下LiDAR点云模拟数据的空白,也为相关领域的研究提供了宝贵的实验资源。
当前挑战
在构建LiDAR-Forest数据集的过程中,研究者们面临了多个挑战。首先,如何确保模拟的LiDAR数据能够真实地反映现实中的森林环境,是数据集创建的关键。其次,构建过程中如何处理和模拟LiDAR传感器的误差,以及如何引入人类在森林中移动时产生的数据波动,都是技术上的难点。此外,数据集的多样性和可定制性也是需要考虑的重要因素,以满足不同研究场景的需求。
常用场景
经典使用场景
LiDAR-Forest Dataset是一款专注于模拟森林场景的LiDAR点云数据集。其经典使用场景在于为林业研究提供高质量的模拟LiDAR数据,这些数据可以用于评估森林重建、树木直径估计以及点云压缩等任务。
衍生相关工作
基于LiDAR-Forest Dataset,衍生出了多项相关研究工作,如利用该数据集进行点云分割、重建和插值等算法的研究,以及将其与其他传感器数据融合的多模态感知研究。
数据集最近研究
最新研究方向
LiDAR-Forest Dataset:一种针对野外森林场景的LiDAR点云模拟数据集。该数据集通过基于Unreal的LiDAR模拟器生成,能够模拟不同种类树木、不同LiDAR类型和场景生成,具有低成本、高效率的特点。研究方向主要集中在利用该数据集评估森林重建、树木直径估计和点云压缩等方面,以推动数字林业社区的研究进展。
相关研究论文
- 1LiDAR-Forest Dataset: LiDAR Point Cloud Simulation Dataset for Forestry Application普渡大学理工学院 · 2024年
以上内容由遇见数据集搜集并总结生成


