Extrapolated Urban View Synthesis Benchmark
收藏github2024-12-09 更新2024-12-10 收录
下载链接:
https://github.com/ai4ce/EUVS-Benchmark
下载链接
链接失效反馈官方服务:
资源简介:
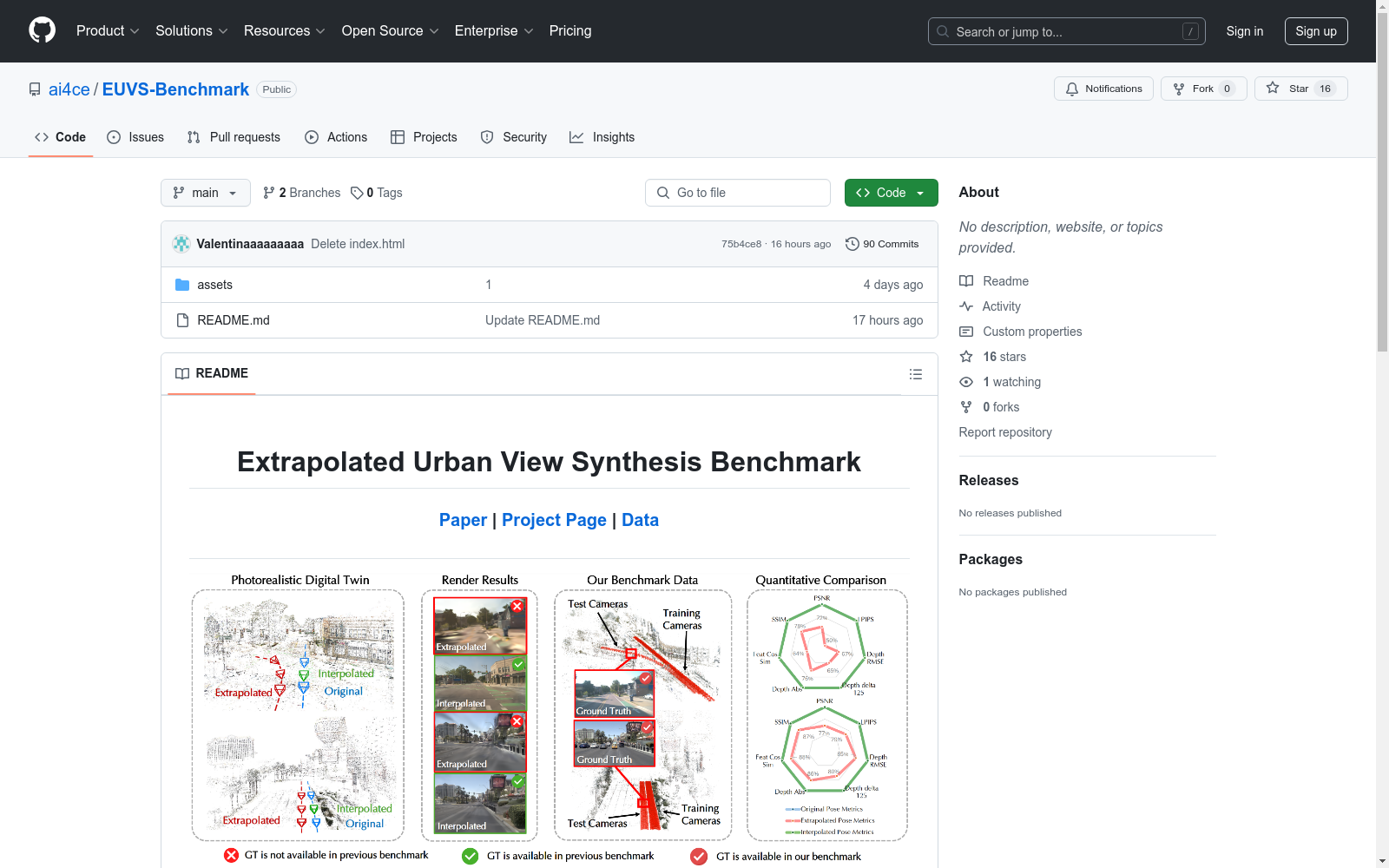
我们构建了一个全面的现实世界基准,用于定量和定性评估大规模城市场景中的外推新颖视图合成。
We constructed a comprehensive real-world benchmark for the quantitative and qualitative evaluation of extrapolative novel view synthesis in large-scale urban scenes.
创建时间:
2024-11-25
原始信息汇总
Extrapolated Urban View Synthesis Benchmark
数据集概述
- 名称: Extrapolated Urban View Synthesis Benchmark
- 简介: 该数据集用于定量和定性评估大规模城市场景中的外推新颖视图合成。
- 数据来源: 利用公开的自动驾驶数据集,包含多次遍历、多辆车辆和多个摄像头。
- 发布计划:
- 数据发布: 预计2024年12月11日
- 代码发布: 预计2024年12月25日
数据集用途
- 应用领域: 自动驾驶和城市机器人模拟技术。
- 评估方法: 对最先进的3D高斯喷射方法进行定量和定性评估,涵盖不同难度级别。
相关资源
- 论文: arXiv链接
- 项目页面: 项目页面链接
- 数据集链接: Hugging Face数据集链接
引用
BibTeX @misc{han2024extrapolatedurbanviewsynthesis, title={Extrapolated Urban View Synthesis Benchmark}, author={Xiangyu Han and Zhen Jia and Boyi Li and Yan Wang and Boris Ivanovic and Yurong You and Lingjie Liu and Yue Wang and Marco Pavone and Chen Feng and Yiming Li}, year={2024}, eprint={2412.05256}, archivePrefix={arXiv}, primaryClass={cs.CV}, url={https://arxiv.org/abs/2412.05256}, }
搜集汇总
数据集介绍
构建方式
在构建Extrapolated Urban View Synthesis Benchmark数据集时,研究团队利用了公开的自动驾驶车辆(AV)数据集,这些数据集包含了多次穿越、多辆车辆和多个摄像头的记录。通过这些数据,团队构建了首个针对大规模城市场景中新颖视图合成的外推基准。数据集的构建不仅涵盖了高度相关的训练和测试视图,还特别关注了测试视图与训练视图之间存在较大偏差的外推情况,从而填补了现有研究中的空白。
特点
Extrapolated Urban View Synthesis Benchmark数据集的主要特点在于其针对大规模城市场景的外推视图合成能力。该数据集不仅包含了高度相关的视图数据,还特别设计了测试视图与训练视图之间存在显著差异的外推场景,以评估现有方法在面对大视角变化时的表现。此外,数据集还结合了扩散先验和几何改进,以探索这些因素对新颖视图合成效果的影响。
使用方法
使用Extrapolated Urban View Synthesis Benchmark数据集时,研究者可以通过提供的官方代码链接获取基准代码,这些代码涵盖了多种先进的视图合成方法,如3D Gaussian Splatting、3D Gaussian Mixture等。通过这些代码,研究者可以对数据集中的不同难度级别进行定量和定性评估,从而深入理解各方法在面对大视角变化时的性能表现。此外,数据集的发布旨在推动自动驾驶和城市机器人模拟技术的发展,为相关领域的研究提供有力支持。
背景与挑战
背景概述
Extrapolated Urban View Synthesis Benchmark(EUVS)数据集由Xiangyu Han等人于2024年创建,旨在解决自动驾驶和城市机器人模拟技术中的关键问题。该数据集的核心研究问题是如何在大型城市场景中进行外推视角合成,以生成多样化的未见视角,从而适应自动驾驶车辆广泛的连续姿态分布。通过利用公开的自动驾驶数据集,EUVS数据集包含了多次遍历、多车辆和多摄像头的数据,为评估和训练先进的3D高斯喷射方法提供了全面的基准。该数据集的发布对推动自动驾驶和城市机器人模拟技术的发展具有重要意义。
当前挑战
EUVS数据集在构建过程中面临的主要挑战包括:1) 外推视角合成在测试视角与训练视角显著偏离时的性能评估,这要求方法具有高度的泛化能力;2) 现有3D高斯喷射方法在处理大视角变化时容易过拟合训练视角,导致外推性能不佳;3) 尽管引入了扩散先验和改进几何结构,但这些方法仍无法根本改善在大视角变化下的视角合成效果。这些挑战凸显了开发更鲁棒方法和大规模训练数据的迫切需求。
常用场景
经典使用场景
在自动驾驶和城市机器人模拟领域,Extrapolated Urban View Synthesis Benchmark数据集的经典使用场景主要集中在评估和提升新视角合成的泛化能力。该数据集通过提供大量偏离训练视角的测试视图,使得研究人员能够更全面地评估现有3D高斯喷射方法在处理大视角变化时的表现。这种评估不仅有助于识别现有方法的局限性,还为开发更鲁棒的新视角合成技术提供了宝贵的数据支持。
实际应用
在实际应用中,Extrapolated Urban View Synthesis Benchmark数据集为自动驾驶和城市机器人的模拟提供了关键支持。通过评估和提升新视角合成的泛化能力,该数据集帮助开发更逼真和鲁棒的模拟环境,从而提高自动驾驶车辆的训练效果和安全性。此外,该数据集还为城市机器人提供了更真实的视觉环境模拟,有助于提升其在复杂城市环境中的导航和操作能力。
衍生相关工作
基于Extrapolated Urban View Synthesis Benchmark数据集,已衍生出多项相关经典工作。例如,研究人员利用该数据集对3D高斯喷射方法进行了深入评估,揭示了其在处理大视角变化时的局限性,并提出了改进方案。此外,该数据集还激发了对扩散先验和几何改进的研究,以提升新视角合成的鲁棒性和泛化能力。这些工作不仅推动了新视角合成技术的发展,还为自动驾驶和城市机器人的模拟提供了新的技术路径。
以上内容由遇见数据集搜集并总结生成


