GLEAM-Bench
收藏github2025-04-14 更新2025-04-15 收录
下载链接:
https://github.com/zjwzcx/GLEAM-Bench
下载链接
链接失效反馈官方服务:
资源简介:
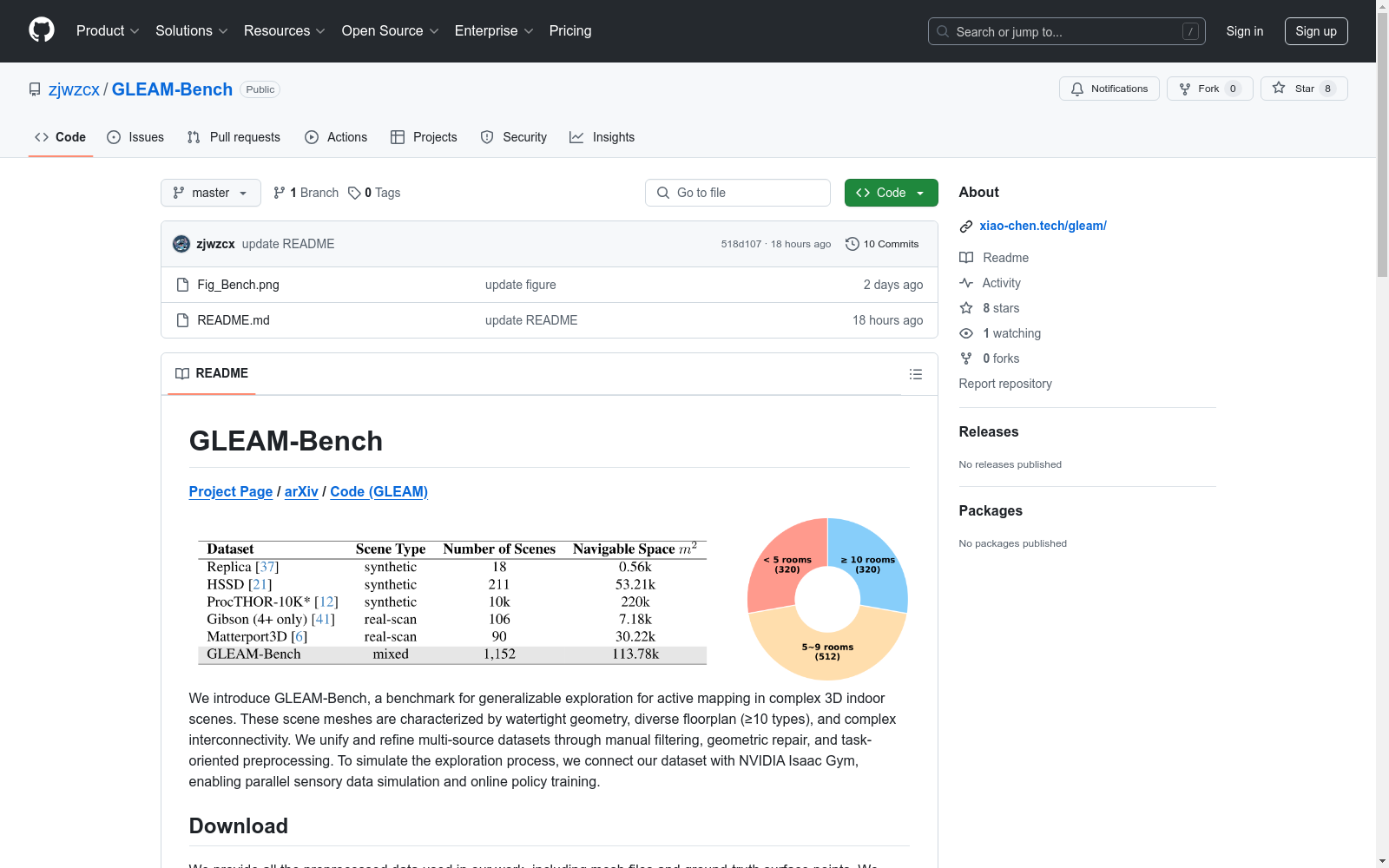
GLEAM-Bench是一个用于复杂3D室内场景中主动映射的通用探索基准。这些场景网格具有水密几何、多样化的平面图(≥10种类型)和复杂的互连性。我们通过手动过滤、几何修复和面向任务的预处理来统一和优化多源数据集。为了模拟探索过程,我们将数据集与NVIDIA Isaac Gym连接,实现并行感官数据模拟和在线策略训练。
GLEAM-Bench is a general exploration benchmark for active mapping in complex 3D indoor scenes. These scene meshes feature watertight geometry, diverse floor plans (≥10 types) and complex interconnectivity. We unify and optimize multi-source datasets via manual filtering, geometry repair and task-oriented preprocessing. To simulate the exploration process, we connect this dataset with NVIDIA Isaac Gym to enable parallel sensory data simulation and online policy training.
创建时间:
2025-04-13
原始信息汇总
GLEAM-Bench数据集概述
数据集简介
- GLEAM-Bench是一个用于复杂3D室内场景中主动映射的通用探索基准。
- 场景网格特点:水密几何、多样化平面图(≥10种类型)、复杂互联性。
- 通过人工过滤、几何修复和任务导向预处理统一和优化多源数据集。
- 与NVIDIA Isaac Gym集成以模拟探索过程,支持并行感官数据模拟和在线策略训练。
数据下载
- 提供所有预处理数据,包括网格文件和地面真实表面点。
- 推荐下载地址:Google Drive链接
目录结构
data_gleam ├── stage1_512 │ ├── gt │ ├── obj │ ├── urdf ├── stage2_512 │ ├── gt │ ├── obj │ ├── urdf
原始数据
raw_data_gleam ├── procthor_12-room_64 │ ├── gt │ ├── obj ├── gibson_96 │ ├── gt │ ├── obj ├── hssd_32 │ ├── gt │ ├── obj ...
引用
- GLEAM论文:arXiv待补充
- 代码:GLEAM代码库
- 相关引用文献:
- ProcTHOR (NeurIPS 2022)
- Gibson Env (CVPR 2018)
- HSSD-200 (arXiv 2023)
- Matterport3D (3DV 2017)
搜集汇总
数据集介绍
构建方式
在三维室内场景主动映射领域,GLEAM-Bench通过整合多源数据集构建而成,采用水密几何结构的复杂场景网格作为基础。研究团队对原始数据进行了人工筛选、几何修复及任务导向的预处理,确保场景具备多样化平面布局(≥10种类型)和复杂互联特性。为模拟探索过程,数据集与NVIDIA Isaac Gym平台深度集成,支持并行传感器数据模拟与在线策略训练,实现了高效的计算性能。
使用方法
用户可通过Google Drive获取预处理后的网格文件与地表点云数据,目录结构按训练阶段分层存储。数据集支持两种应用模式:压缩版本适用于快速策略训练,原始版本包含纹理和对象级分层(交互式)供深度分析。使用前需配置NVIDIA Isaac Gym环境以激活并行仿真功能,引用时需同时标注GLEAM论文及原始数据集来源。数据目录中的URDF文件可直接导入物理引擎,实现与主流机器人仿真平台的无缝对接。
背景与挑战
背景概述
GLEAM-Bench是由研究人员开发的面向复杂三维室内场景主动建图任务的基准数据集,旨在推动通用化探索算法的研究。该数据集整合了ProcTHOR、Gibson、HSSD-200和Matterport3D等多源三维场景数据,通过几何修复与任务导向的预处理流程,构建了包含水密几何、多样化平面布局(≥10种类型)和复杂连通性的场景网格集合。研究团队创新性地将数据集与NVIDIA Isaac Gym仿真平台对接,实现了并行传感器数据模拟与在线策略训练功能,为具身智能体的三维环境探索研究提供了标准化测试平台。
当前挑战
在领域问题层面,GLEAM-Bench针对主动建图任务面临三大核心挑战:复杂场景拓扑结构导致的路径规划困难、多源数据融合带来的几何一致性保持问题,以及实时建图需求与计算资源限制的矛盾。数据集构建过程中,研究团队需攻克多源场景的几何修复技术难题,解决纹理移除与场景压缩带来的信息损失问题,同时确保512个训练场景在双阶段分布式处理中的数据结构一致性。这些技术挑战的突破为三维场景理解领域提供了重要的基准参考。
常用场景
经典使用场景
在三维场景理解与主动探索领域,GLEAM-Bench作为专为复杂室内环境设计的基准数据集,其经典应用场景集中于训练和评估智能体在未知环境中的自主探索与建图能力。该数据集通过整合多源场景数据并优化几何结构,为研究者提供了高度逼真且多样化的三维室内场景,涵盖超过10种不同户型布局,有效支撑了基于强化学习的探索策略开发与测试。
解决学术问题
GLEAM-Bench的构建解决了三维空间探索研究中缺乏标准化评估环境的痛点,其水密几何结构和复杂空间连通性为研究通用化探索策略提供了理想测试平台。该数据集通过统一ProcTHOR、Gibson等权威数据源,并引入任务导向的预处理流程,显著提升了跨场景策略迁移研究的可靠性,填补了现有基准在场景多样性和物理准确性方面的空白。
实际应用
在实际应用层面,该数据集通过与NVIDIA Isaac Gym的深度集成,实现了150FPS的高效并行仿真,大幅加速了服务机器人室内导航、AR/VR环境重建等应用的算法迭代。其提供的原始纹理数据与对象级分层结构,更直接支持了建筑信息建模(BIM)和智能家居系统的开发需求。
数据集最近研究
最新研究方向
在三维室内场景主动映射领域,GLEAM-Bench作为首个支持可泛化探索的基准数据集,正推动着具身智能与计算机视觉的交叉研究。该数据集通过整合ProcTHOR、Gibson、HSSD等多源场景数据,并采用几何修复与任务导向预处理,为复杂空间拓扑下的实时策略训练提供了标准化平台。其与NVIDIA Isaac Gym的深度集成实现了150FPS的高效并行仿真,显著加速了基于强化学习的探索算法开发。当前研究热点集中于跨场景迁移学习、多模态传感融合以及动态障碍物规避等方向,这些探索将直接服务于家庭服务机器人、AR/VR环境建模等实际应用场景。数据集开源的纹理保留版本与压缩版本并行的设计,既满足了算法验证的轻量化需求,也为真实感重建研究保留了扩展空间。
以上内容由遇见数据集搜集并总结生成


