X-Capture Dataset
收藏arXiv2025-04-03 更新2025-04-07 收录
下载链接:
https://xcapture.github.io
下载链接
链接失效反馈官方服务:
资源简介:
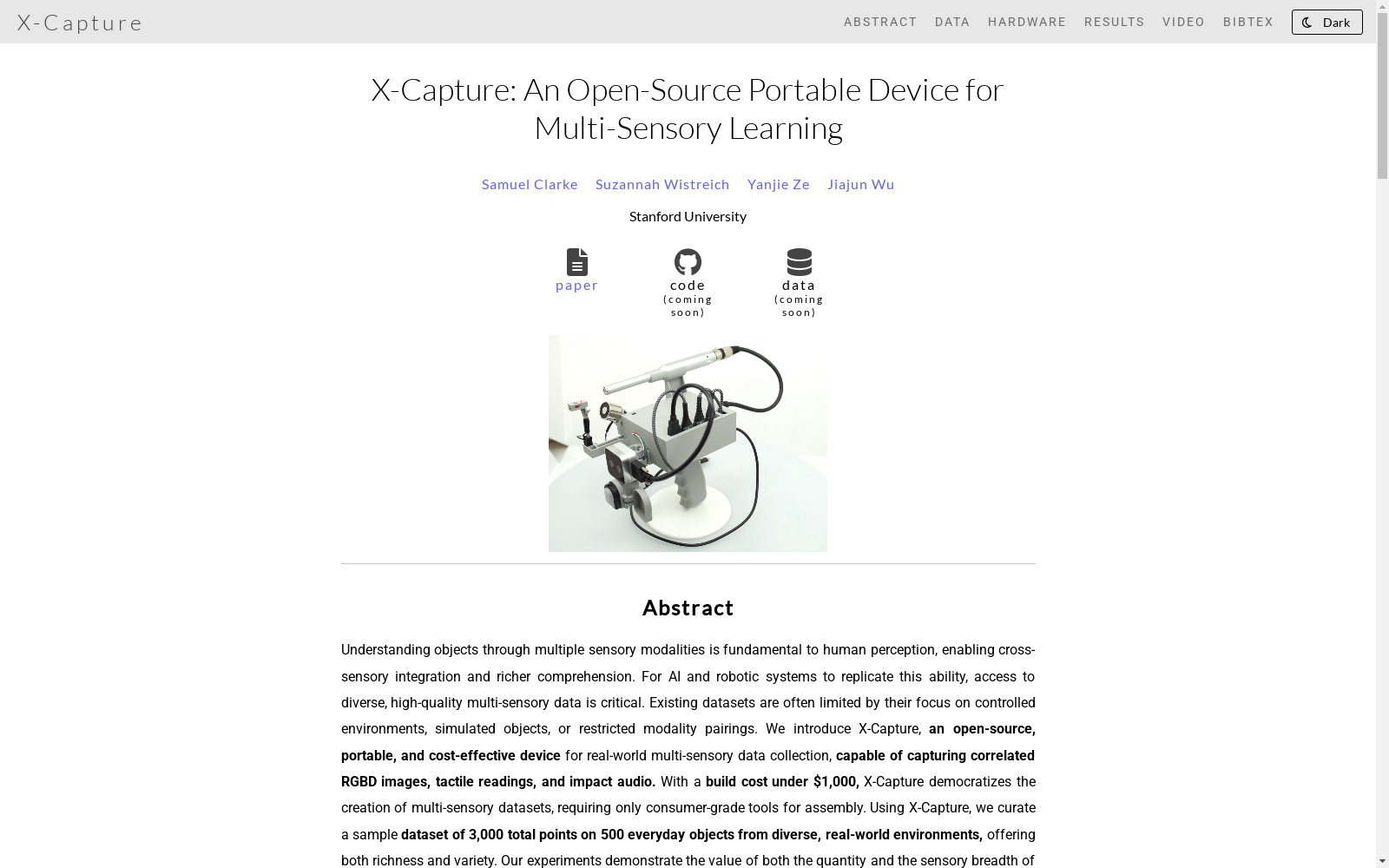
X-Capture Dataset是由斯坦福大学的研究团队使用X-Capture设备收集的一个多感官数据集。该数据集包含了在真实世界环境中,针对500个日常物品的3000个点的视觉(RGB和深度)、触觉和冲击音频数据。数据集利用了便携式设备的灵活性,收集了各种材料、几何形状和功能用途的物品,旨在为AI和机器人系统提供用于多感官理解和学习的数据资源。
The X-Capture Dataset is a multi-sensory dataset collected by a research team from Stanford University using the X-Capture device. It contains visual (RGB and depth), tactile, and impact audio data collected at 3000 points across 500 everyday objects in real-world environments. Leveraging the flexibility of portable devices, the dataset gathers objects with diverse materials, geometric shapes and functional purposes, aiming to provide data resources for multi-sensory understanding and learning of AI and robotic systems.
提供机构:
斯坦福大学
创建时间:
2025-04-03
搜集汇总
数据集介绍
构建方式
X-Capture数据集通过一种创新的开源便携设备构建,该设备能够在真实环境中捕获多感官数据。设备集成了RGBD相机、触觉传感器和冲击音频采集装置,能够在单一操作中同步记录视觉、触觉和听觉信息。数据采集过程涉及用户在自然环境中对500个日常物体的3000个点进行多模态数据采集,确保了数据的多样性和真实性。
特点
X-Capture数据集以其多感官同步采集和真实环境数据为显著特点。数据集涵盖了视觉(RGB和深度)、触觉和听觉(冲击音频)三种模态,且所有数据均在自然环境中采集,避免了模拟或受控环境带来的领域差距。此外,数据集还提供了详细的物体描述和点云数据,增强了其在多模态学习任务中的实用性。
使用方法
X-Capture数据集适用于多模态表示学习和跨感官推理任务。研究人员可以利用该数据集进行预训练或微调,以提升模型在物体识别、跨模态检索和生成任务中的性能。数据集中的多模态对齐数据特别适合用于研究人类感知模拟和机器人交互技术。
背景与挑战
背景概述
X-Capture数据集由斯坦福大学的研究团队于2025年提出,旨在解决多模态感知在人工智能和机器人系统中的关键挑战。该数据集通过便携式开源设备采集真实世界物体的多感官数据,包括RGBD图像、触觉读数及冲击音频,覆盖500个日常物体的3000个采样点。其创新性在于突破了传统数据集受限于受控环境、模拟对象或有限模态配对的瓶颈,为跨感官检索、重建等物体中心任务提供了首个野外环境下的点级对齐多模态基准。数据集通过低成本(<1000美元)设计显著降低了多模态数据采集门槛,推动了具身智能领域对物理世界理解的研究。
当前挑战
在领域问题层面,X-Capture需解决多模态对齐的三大核心挑战:跨模态表征学习中的模态鸿沟问题、物体点级特征在不同感官信号中的异构表达问题,以及野外环境噪声对音频-触觉信号同步采集的干扰问题。在构建过程中面临传感器集成挑战:需平衡RealSense相机深度精度与DIGIT触觉传感器的空间分辨率,设计电磁锤装置实现可重复的冲击力控制(误差<0.5N),并通过定制PCB解决六种异质传感器的时间同步难题(延迟<1ms)。此外,数据标注需人工确保每个采样点的四模态严格空间对齐,这对复杂几何物体的标注一致性提出极高要求。
常用场景
经典使用场景
X-Capture数据集在多模态感知研究中具有广泛的应用价值,特别是在机器人操作和物体识别领域。该数据集通过整合RGBD图像、触觉数据和冲击音频,为研究者提供了一个全面的多感官数据平台。其经典使用场景包括跨模态检索任务,例如通过触觉数据预测物体的视觉特征,或通过音频信号推断物体的材质属性。这种多模态对齐能力使得X-Capture成为模拟人类感知机制的理想工具。
解决学术问题
X-Capture数据集解决了多模态学习中的关键挑战,包括真实世界环境中数据稀缺和模态对齐困难的问题。传统数据集往往局限于受控环境或模拟对象,而X-Capture通过在自然场景中采集数据,显著缩小了训练与测试环境之间的领域差距。该数据集支持的研究问题包括跨模态表示学习、多模态生成模型和物体中心感知任务,为人工智能系统实现类人感知能力提供了重要基础。
衍生相关工作
X-Capture数据集已经催生了一系列重要的衍生研究。基于该数据集的跨模态表示学习框架在物体检索任务中实现了state-of-the-art性能。相关工作还包括多模态生成模型,如从触觉数据重建3D物体形状,以及音频引导的物体检测系统。这些工作不仅验证了数据集的质量,也推动了多模态感知领域的理论和方法创新,为后续研究设立了新的基准。
以上内容由遇见数据集搜集并总结生成


