PANIC
收藏arXiv2024-12-17 更新2024-12-19 收录
下载链接:
https://www.ipb.uni-bonn.de/data/panic
下载链接
链接失效反馈官方服务:
资源简介:
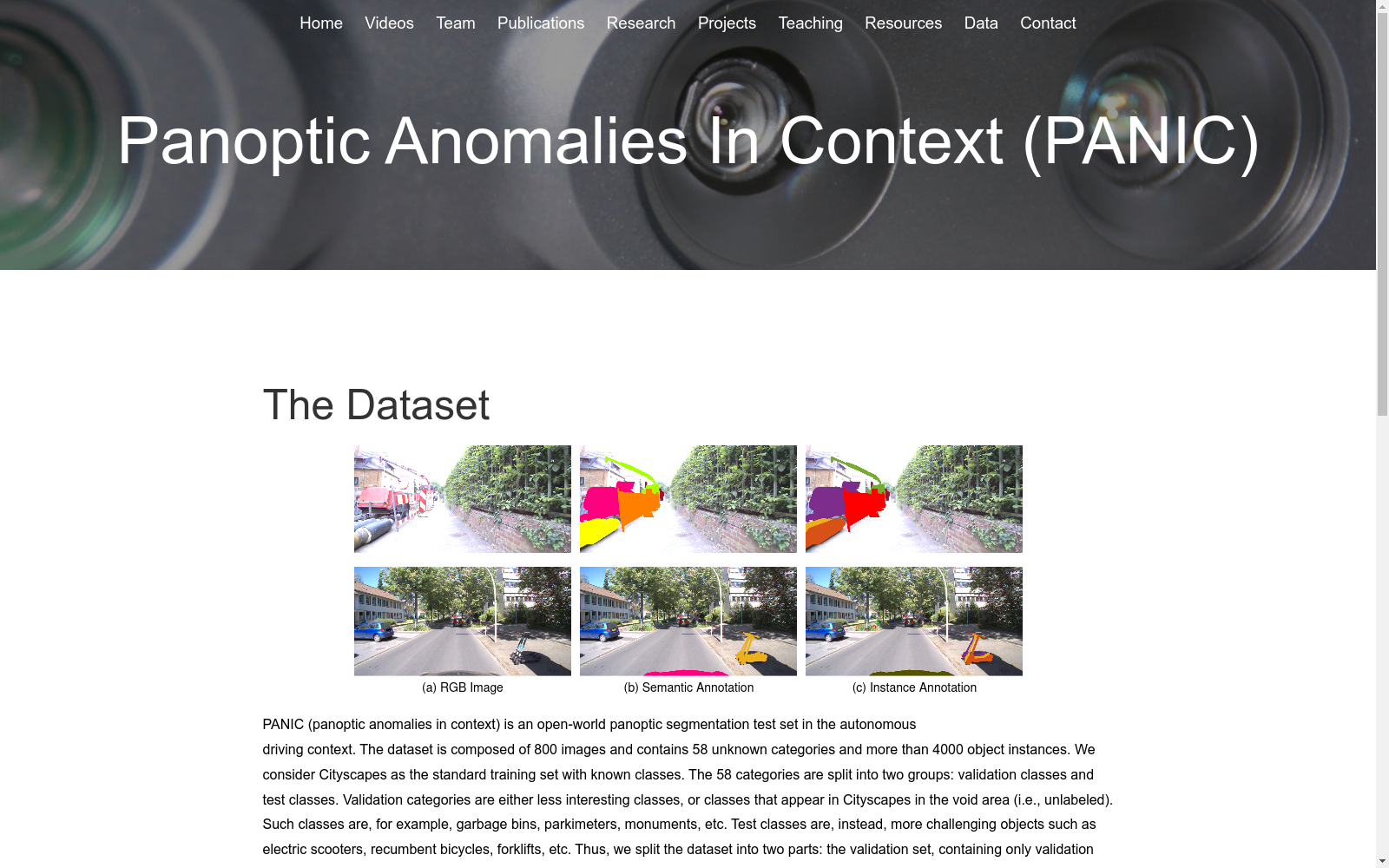
PANIC数据集是由波恩大学机器人中心创建的,旨在评估自动驾驶场景中的开放世界全景分割任务。该数据集包含800张图像,提供了像素级的异常物体标注,涵盖超过50个未知类别和4000个物体实例。数据集通过在德国波恩的街道上使用多模态传感器套件记录,并手动标注了语义和实例级别的异常物体。PANIC数据集的应用领域主要是自动驾驶中的开放世界分割任务,旨在解决未知物体和类别的识别问题。
The PANIC dataset was developed by the Robotics Center at the University of Bonn to evaluate open-world panoptic segmentation tasks in autonomous driving scenarios. It comprises 800 images with pixel-level annotations for anomalous objects, covering over 50 unknown categories and 4,000 object instances. The dataset was collected using a multimodal sensor suite on the streets of Bonn, Germany, with manual annotations for semantic and instance-level anomalous objects. The PANIC dataset is primarily utilized for open-world segmentation tasks in autonomous driving, with the goal of addressing the recognition of unknown objects and categories.
提供机构:
波恩大学机器人中心
创建时间:
2024-12-17
搜集汇总
数据集介绍
构建方式
PANIC数据集通过在德国波恩的街道上使用搭载在车辆上的多模态传感器套件进行数据采集,并手动标注了图像中的异常物体。该数据集包含800张图像,涵盖了超过50个未知类别和4000个物体实例。这些图像在不同的时间段和天气条件下采集,确保了数据集的多样性和挑战性。为了确保数据集的真实性,所有出现在Cityscapes数据集中的类别被视为已知类别,而其他类别则被标注为未知类别。
特点
PANIC数据集的主要特点是其高分辨率的像素级标注,涵盖了语义和实例级别的异常物体。数据集中的未知类别在训练集中未出现,使得该数据集成为评估开放世界语义分割任务的理想基准。此外,数据集的隐藏测试集设计确保了测试集的真实性和挑战性,因为测试集中的类别在验证集中也未出现。
使用方法
PANIC数据集可用于多种开放世界分割任务的评估,包括异常分割、开放世界语义分割、开放集全景分割和开放世界全景分割。研究人员可以使用该数据集来训练和测试模型,评估其在处理未知类别和物体实例时的性能。数据集还提供了公开的竞赛,允许研究人员在隐藏测试集上提交结果,以评估其在真实场景中的表现。
背景与挑战
背景概述
PANIC数据集由德国波恩大学的Matteo Sodano、Federico Magistri、Jens Behley和Cyrill Stachniss等人创建,旨在解决自动驾驶场景中的开放世界全景分割问题。该数据集于2024年提出,包含800张图像,提供了超过50个未知类别的像素级语义和实例标注,涵盖了4000多个对象实例。PANIC数据集的核心研究问题是如何在测试时发现新的语义类别和对象实例,并确保这些类别的一致性。该数据集的发布对自动驾驶领域具有重要意义,因为它为开放世界全景分割任务提供了一个极具挑战性的基准,推动了相关算法的发展。
当前挑战
PANIC数据集面临的挑战主要体现在两个方面:首先,开放世界全景分割任务本身具有极高的复杂性,要求模型能够在测试时识别并分割出训练集中未见过的类别和实例,这对模型的泛化能力和鲁棒性提出了极高要求。其次,数据集的构建过程中也面临诸多挑战,如如何在真实场景中捕捉到多样化的未知对象,并进行高质量的像素级标注。此外,数据集中未知类别的多样性和分布不均也为模型的训练和评估带来了额外的困难。
常用场景
经典使用场景
PANIC数据集的经典使用场景主要集中在自动驾驶领域中的开放世界全景分割任务。该数据集通过提供高分辨率的RGB图像和像素级的语义与实例标注,支持模型在测试时发现新的语义类别和对象实例。这种能力对于自动驾驶系统在复杂、多变的真实世界环境中安全运行至关重要。
实际应用
PANIC数据集的实际应用场景广泛,特别是在自动驾驶领域。自动驾驶车辆在行驶过程中可能会遇到训练数据中未曾见过的物体或场景,如电动滑板车、叉车等。通过使用PANIC数据集训练的模型,车辆能够在这些未知对象出现时进行有效的语义分割和实例分割,从而提高系统的安全性和鲁棒性。此外,该数据集还可应用于机器人导航、智能监控等领域,帮助系统在复杂环境中识别和处理未知对象。
衍生相关工作
PANIC数据集的发布催生了一系列相关的经典工作,特别是在开放世界分割领域。例如,基于PANIC数据集的研究推动了开放世界语义分割、开放集全景分割等任务的发展。此外,PANIC数据集还启发了其他研究者开发新的算法,如Con2MAV,该算法在开放世界全景分割任务中取得了显著的性能提升。这些工作不仅推动了自动驾驶技术的进步,也为其他领域的开放世界分割任务提供了新的思路和方法。
以上内容由遇见数据集搜集并总结生成


