PhysicalAI-Robotics-GR00T-Teleop-G1
收藏魔搭社区2025-12-04 更新2025-06-14 收录
下载链接:
https://modelscope.cn/datasets/nv-community/PhysicalAI-Robotics-GR00T-Teleop-G1
下载链接
链接失效反馈官方服务:
资源简介:
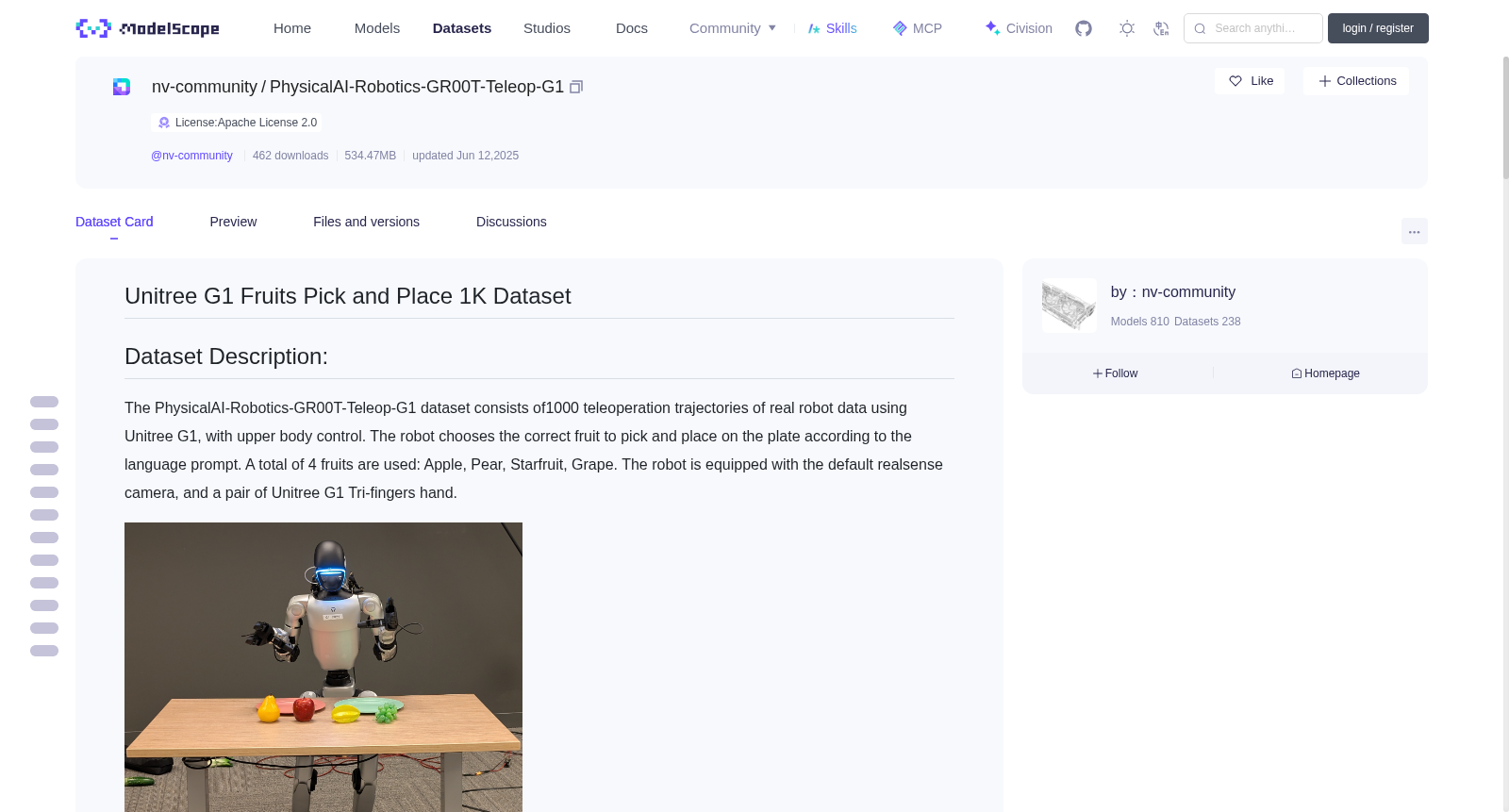
## Unitree G1 Fruits Pick and Place 1K Dataset
## Dataset Description:
The PhysicalAI-Robotics-GR00T-Teleop-G1 dataset consists of1000 teleoperation trajectories of real robot data using Unitree G1, with upper body control. The robot chooses the correct fruit to pick and place on the plate according to the language prompt. A total of 4 fruits are used: Apple, Pear, Starfruit, Grape. The robot is equipped with the default realsense camera, and a pair of Unitree G1 Tri-fingers hand.
<img src="https://cdn-uploads.huggingface.co/production/uploads/67b8da81d01134f89899b4a7/nnQttu2PywkTLVMcuNL42.jpeg" width="48%">
This dataset is ready for commercial/non-commercial use.
## Dataset Owner(s):
NVIDIA GEAR
## Dataset Creation Date:
June 1, 2025
## License/Terms of Use:
This dataset is licensed under the [Creative Commons Attribution 4.0 International License (CC BY 4.0)](https://creativecommons.org/licenses/by/4.0/legalcode).
## Intended Usage:
Researchers, Academics, Open-Source Community: AI-driven robotics research and algorithm development.
Developers: Integrate and customize AI for various robotic applications.
Startups & Companies: Accelerate robotics development and reduce training costs.
## Dataset Characterization
**Data Collection Method**<br>
[Human] <br>
**Labeling Method**<br>
[Human] <br>
## Dataset Format
MP4 and HDF5 files
Modality:
- Observation: 43 dim of vectorized state (joint positions of full body + hands)
- Action: 43 dim of vectorized action (joint positions of full body + hands)
- Video: RGB video, 640x480 resolution, 20fps
- Language Instruction:
- *"Pick the apple from the table and place it into the basket."*
- *"Pick the pear from the table and place it into the basket."*
- *"Pick the grapes from the table and place them into the basket."*
- *"Pick the starfruit from the table and place it into the basket."*
| Dataset Folder | Preview |
|----------------|---------|
| g1-pick-apple |  |
| g1-pick-pear |  |
| g1-pick-grapes |  |
| g1-pick-starfruit |  |
## Dataset Quantification
- 1000 teleoperation trajectories<br>
- 1000 videos in MP4<br>
- 1000 HDF5 files for actions<br>
- Total data storage: ~400MB<br>
## Download the dataset
```bash
huggingface-cli download \
--repo-type dataset nvidia/PhysicalAI-Robotics-GR00T-Teleop-G1 \
--local-dir ./datasets/
```
## Finetuning with GR00T-N1.5
Refer to the [Github repo](https://github.com/NVIDIA/Isaac-GR00T/blob/main/getting_started/3_0_new_embodiment_finetuning.md) for the finetuning script.
## Ethical Considerations:
NVIDIA believes Trustworthy AI is a shared responsibility and we have established policies and practices to enable development for a wide array of AI applications. When downloaded or used in accordance with our terms of service, developers should work with their internal model team to ensure this model meets requirements for the relevant industry and use case and addresses unforeseen product misuse.
Please report security vulnerabilities or NVIDIA AI Concerns [here](https://www.nvidia.com/en-us/support/submit-security-vulnerability/).
# Unitree G1水果抓取与放置1K数据集
## 数据集描述:
本数据集PhysicalAI-Robotics-GR00T-Teleop-G1包含1000条基于Unitree G1人形机器人的真实遥操作轨迹数据,该机器人采用上半身控制模式。机器人可根据语言提示选取对应水果并将其抓取放置于餐盘上,本次实验共使用苹果(Apple)、梨(Pear)、杨桃(Starfruit)、葡萄(Grape)四种水果。机器人搭载默认的实感(RealSense)相机以及一对Unitree G1三指机械手。
<img src="https://cdn-uploads.huggingface.co/production/uploads/67b8da81d01134f89899b4a7/nnQttu2PywkTLVMcuNL42.jpeg" width="48%">
本数据集可用于商业及非商业用途。
## 数据集所属方:
NVIDIA GEAR
## 数据集创建日期:
2025年6月1日
## 许可与使用条款:
本数据集采用[知识共享署名4.0国际许可协议(Creative Commons Attribution 4.0 International License,CC BY 4.0)](https://creativecommons.org/licenses/by/4.0/legalcode)进行授权。
## 预期用途:
研究人员、学术界人士、开源社区:用于AI驱动的机器人研究与算法开发。
开发者:集成并定制AI以适配各类机器人应用场景。
初创企业与公司:加速机器人开发进程,降低训练成本。
## 数据集特征
**数据采集方式**<br>
[人类操作员] <br>
**标注方式**<br>
[人类操作员] <br>
## 数据集格式
MP4与HDF5文件
数据模态包括:
- 观测数据:43维向量化状态(包含全身及手部关节位置)
- 动作数据:43维向量化动作(包含全身及手部关节位置)
- 视频数据:RGB视频,分辨率640×480,帧率20fps
- 语言指令:
- *"从桌面抓取苹果并放入篮中。"*
- *"从桌面抓取梨并放入篮中。"*
- *"从桌面抓取葡萄并放入篮中。"*
- *"从桌面抓取杨桃并放入篮中。"*
| 数据集文件夹 | 预览图 |
|----------------|---------|
| g1-pick-apple |  |
| g1-pick-pear |  |
| g1-pick-grapes |  |
| g1-pick-starfruit |  |
## 数据集量化统计
- 1000条遥操作轨迹<br>
- 1000条MP4格式视频<br>
- 1000个用于存储动作数据的HDF5文件<br>
- 总数据存储量:约400MB<br>
## 数据集下载
bash
huggingface-cli download \
--repo-type dataset nvidia/PhysicalAI-Robotics-GR00T-Teleop-G1 \
--local-dir ./datasets/
## 基于GR00T-N1.5的微调
有关微调脚本的详细说明,请参阅[GitHub仓库](https://github.com/NVIDIA/Isaac-GR00T/blob/main/getting_started/3_0_new_embodiment_finetuning.md)。
## 伦理考量
NVIDIA认为,可信人工智能是一项共同责任,我们已建立相关政策与实践规范,以支持各类人工智能应用的开发。开发者在按照服务条款下载或使用本数据集时,应与其内部模型团队协作,确保该模型符合相关行业及应用场景的要求,并应对可能出现的产品误用问题。
请通过[此链接](https://www.nvidia.com/en-us/support/submit-security-vulnerability/)提交安全漏洞或NVIDIA人工智能相关问题。
提供机构:
maas
创建时间:
2025-06-12
搜集汇总
数据集介绍
背景与挑战
背景概述
PhysicalAI-Robotics-GR00T-Teleop-G1数据集包含1000条Unitree G1机器人的水果抓取放置遥操作轨迹数据,涵盖4种水果类型,提供MP4视频和HDF5动作文件,适用于机器人AI研究。数据集采用CC BY 4.0许可,支持商业和非商业用途。
以上内容由遇见数据集搜集并总结生成


