BEHAVE
收藏arXiv2022-04-14 更新2024-06-21 收录
下载链接:
http://virtualhumans.mpi-inf.mpg.de/behave
下载链接
链接失效反馈官方服务:
资源简介:
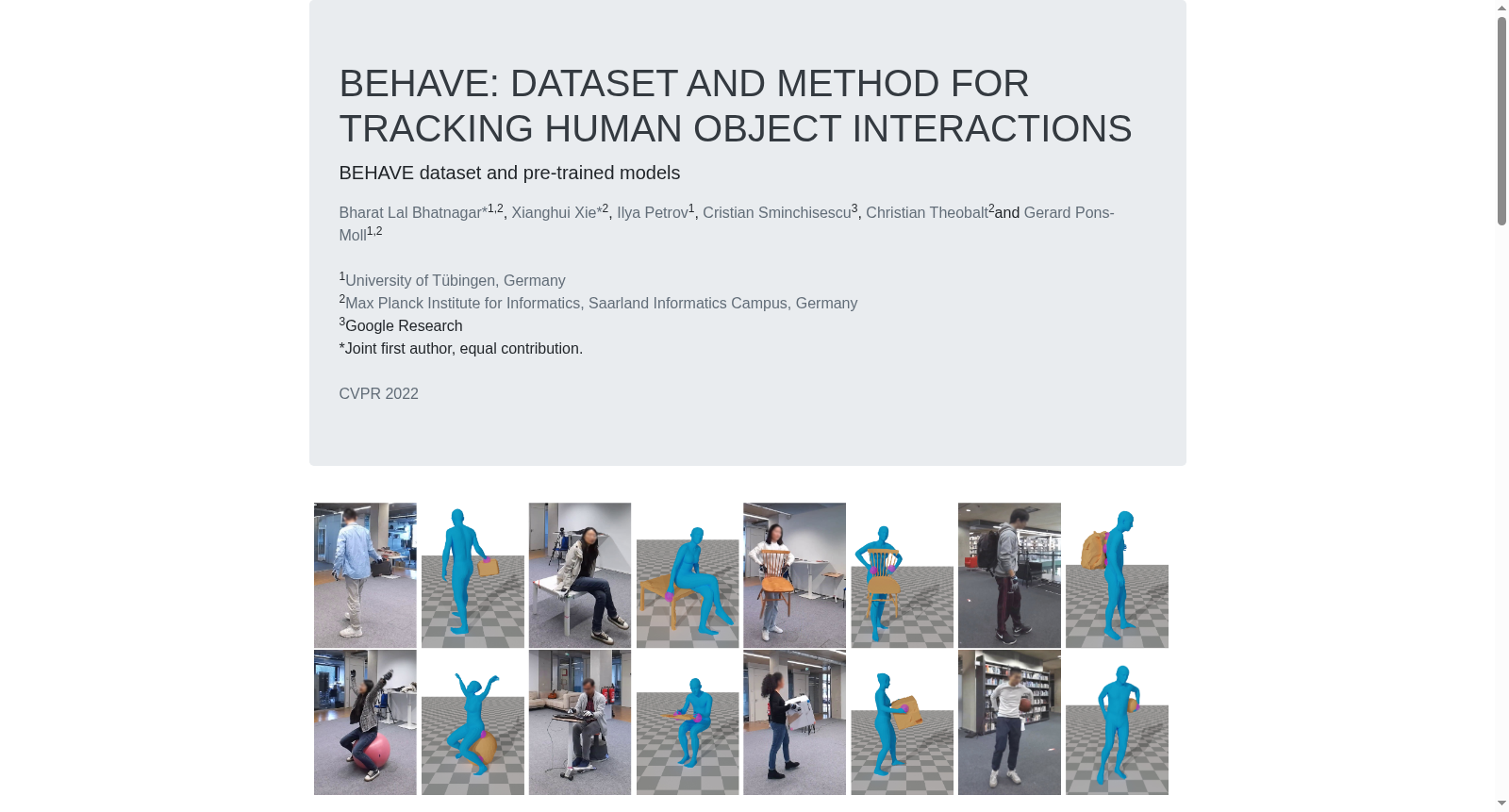
BEHAVE数据集是由德国图宾根大学和马克斯普朗克信息学研究所共同创建的,旨在捕捉和分析人类与物体在自然环境中的交互行为。该数据集包含约15200帧的多视角RGBD图像,记录了8名参与者与20种常见物体在5个不同地点的交互情况。数据集不仅捕捉了人类和物体的3D模型,还包括了交互过程中的接触点标注。BEHAVE数据集的创建过程涉及使用便携式多摄像头设置,通过神经网络模型预测人类和物体之间的对应关系,从而实现对交互行为的精确跟踪。该数据集的应用领域广泛,包括游戏开发、虚拟与混合现实技术、人类行为分析以及人机协作等,旨在解决复杂环境下的交互行为建模问题。
The BEHAVE dataset was co-created by the University of Tübingen in Germany and the Max Planck Institute for Informatics, aiming to capture and analyze human-object interactions in natural environments. It contains approximately 15,200 frames of multi-view RGBD images, recording interactions between 8 participants and 20 common objects across 5 different locations. The dataset not only captures 3D models of humans and objects but also includes contact point annotations during interactions. The creation of the BEHAVE dataset involves using a portable multi-camera setup and neural network models to predict correspondences between humans and objects, thereby achieving precise tracking of interactive behaviors. The BEHAVE dataset has a wide range of application scenarios, including game development, virtual and mixed reality technologies, human behavior analysis, human-computer collaboration and more, aiming to address the problem of interactive behavior modeling in complex environments.
提供机构:
德国图宾根大学
创建时间:
2022-04-14
搜集汇总
数据集介绍
构建方式
在自然交互场景建模领域,BEHAVE数据集的构建体现了对真实环境复杂性的深刻考量。该数据集通过部署四台便携式Kinect深度相机,在五个不同室内场景中采集多视角RGB-D序列,构建了包含八位受试者与二十种日常物体交互的约15,200帧数据。采集过程采用半自动化标注流程:首先通过改进的DetectronV2模型结合人工校正获得人体分割掩码,进而将多视角深度图转换为三维点云;人体姿态通过FrankMocap初始化后,结合三维扫描获得的个性化形状参数优化SMPL模型拟合;物体姿态则通过预扫描的三维网格与人工标注的关键点进行六自由度姿态优化。接触标注通过计算人体表面与物体表面距离小于2厘米的区域自动生成,并记录接触对应关系。
使用方法
该数据集为三维人机交互研究提供了多层次的基准平台。研究者可利用其多模态标注开展三维姿态与形状估计任务,特别是在物体严重遮挡的挑战性场景下评估算法鲁棒性。基于完整的三维标注信息,可开发从单目RGB图像联合重建人体与物体的新方法,填补该领域公共数据集的空白。对于交互建模研究,数据集支持开发基于多视角RGB-D输入的人体与物体联合跟踪算法,并可通过接触标注优化物理合理性。使用流程通常包括数据加载、标注解析、评估指标计算等环节,研究者可根据具体任务选择使用原始RGB-D序列、拟合的三维模型或接触标注信息。数据集的层次化结构支持从二维感知到三维重建、从静态分析到动态跟踪的完整研究链条。
背景与挑战
背景概述
BEHAVE数据集由德国图宾根大学与马克斯·普朗克信息学研究所等机构于2022年联合发布,旨在填补自然环境中全身人-物交互三维数据集的空白。该数据集聚焦于建模人类与日常物体在动态交互过程中的三维姿态、形状及接触关系,核心研究问题涉及如何从多视角RGBD数据中精准追踪人体与物体的三维运动及表面接触。其创新性在于首次提供了包含多视角RGBD帧、SMPL人体模型拟合、物体网格及接触标注的大规模真实交互数据,推动了虚拟现实、行为分析与人机协作等领域的发展,为相关研究提供了关键基准。
当前挑战
BEHAVE数据集致力于解决自然环境中动态人-物交互的三维建模问题,其核心挑战在于如何从噪声大、遮挡严重的多视角RGBD数据中联合追踪人体与物体的精确姿态及接触区域。构建过程中的挑战包括:深度数据固有的噪声与不完整性,交互时人体与物体频繁相互遮挡导致的局部信息缺失,以及接触区域在图像中表征细微、接近分辨率极限所带来的标注困难。此外,数据采集需在多样自然场景中进行,排除了传统标记式运动捕捉系统的使用,要求设计轻便、低成本的便携式多相机方案以支持大规模数据获取。
常用场景
经典使用场景
在计算机视觉与图形学领域,BEHAVE数据集为研究自然环境中人体与物体的三维交互提供了关键基准。该数据集通过多视角RGBD序列捕捉了8名受试者在5个不同场景中与20种常见物体的动态互动,涵盖了搬运、坐立、推拉等多种日常行为。其经典应用场景在于训练和评估联合跟踪人体姿态、物体运动及其表面接触的算法模型,为理解复杂交互行为提供了丰富且真实的视觉数据支撑。
解决学术问题
BEHAVE数据集有效解决了人体与物体交互建模中的多个核心学术问题。传统方法受限于标记式运动捕捉系统的空间约束与高成本,难以在自然环境中捕捉多样化的动态交互。该数据集通过便携式多视角RGBD设备,提供了首个包含完整人体SMPL模型、物体三维网格及接触标注的大规模数据,突破了遮挡、噪声与数据缺失的技术瓶颈,推动了隐式表面表示与对应关系预测等方向的研究进展。
实际应用
在实际应用层面,BEHAVE数据集为虚拟现实、增强现实及人机协作等领域提供了关键技术基础。例如,在虚拟试衣或个性化虚拟人创建中,该数据集能够支持生成自然的人体与物体接触效果;在机器人行为规划中,其接触标注数据有助于训练机器人理解人类操作意图。此外,基于便携摄像头的采集方式降低了部署门槛,使得在家庭、办公等日常场景中实时捕捉交互成为可能。
数据集最近研究
最新研究方向
在三维视觉与人体行为分析领域,BEHAVE数据集作为首个提供全身人-物交互多视角RGBD数据及三维接触标注的资源,正推动着多个前沿研究方向的发展。当前研究聚焦于从稀疏或单目视觉输入中实现精准的人与物体三维联合重建与跟踪,尤其是在自然场景下处理严重遮挡与动态交互的挑战。学者们致力于开发基于隐式神经表示与参数化人体模型(如SMPL)的融合方法,通过预测人体-物体表面接触与对应关系,提升交互建模的物理真实性与泛化能力。该数据集亦促进了单图像三维重建、在复杂遮挡环境下的姿态形状估计、以及人机协作与虚拟现实中的行为合成等热点应用,为构建可泛化于多样物体、场景与动作的智能感知系统奠定了关键基础。
相关研究论文
- 1BEHAVE: Dataset and Method for Tracking Human Object Interactions德国图宾根大学 · 2022年
以上内容由遇见数据集搜集并总结生成


