CU-Multi
收藏arXiv2025-05-23 更新2025-05-27 收录
下载链接:
https://arpg.github.io/cumulti
下载链接
链接失效反馈官方服务:
资源简介:
CU-Multi是一个多机器人数据关联数据集,由科罗拉多大学波尔德分校的自主机器人与感知组收集。该数据集包含在两个不同地点进行的四个同步运行,每个地点有四个轨迹,总共八条轨迹,跨越16.7公里。数据集包含RGB-D、GPS和语义标注的LiDAR数据,通过引入轨迹重叠和密集的LiDAR标注,为评估多机器人数据关联方法提供了一个有吸引力的替代方案。
CU-Multi is a multi-robot data association dataset collected by the Autonomous Robotics and Perception Group at the University of Colorado Boulder. This dataset comprises four synchronized runs conducted at two distinct locations, with four trajectories per site, totaling eight trajectories spanning 16.7 kilometers. The dataset includes RGB-D, GPS, and semantically annotated LiDAR data. By incorporating trajectory overlap and dense LiDAR annotations, it serves as an attractive alternative for evaluating multi-robot data association methods.
提供机构:
University of Colorado Boulder
创建时间:
2025-05-23
原始信息汇总
CU-Multi: 多机器人数据关联数据集
数据集概述
- 名称: CU-Multi
- 用途: 用于评估多机器人系统中的数据关联方法
- 特点:
- 包含多日采集的同步运行数据
- 提供控制轨迹重叠比例
- 包含RGB-D、GPS(带精确地理航向)和语义标注的LiDAR数据
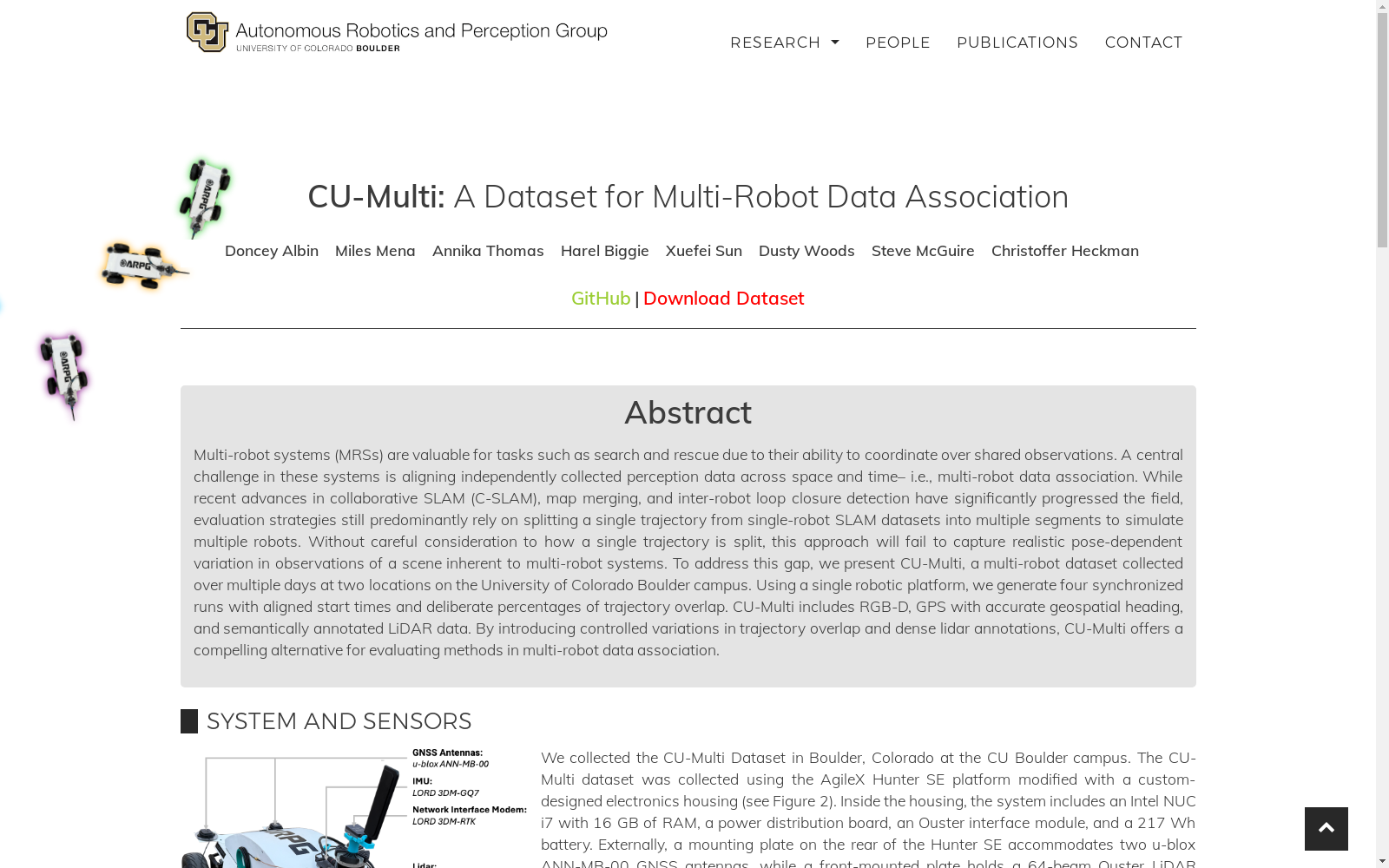
采集系统与传感器
- 平台: AgileX Hunter SE(带定制电子设备外壳)
- 主要设备:
- LiDAR: Ouster OS-64(200米范围,64v x 1028h分辨率,45° x 360°视场,20Hz)
- RGB-D相机: Intel Realsense D455(全局快门,1280 × 800分辨率,90° x 65°视场,30Hz)
- IMU: MicroStrain 3DM-GQ7-GNSS/INS(±8 g,300 dps,400Hz)
- 网络接口调制解调器: MicroStrain 3DM-RTK Modem(2 cm,0.1°精度,2Hz)
- GNSS天线: u-blox ANN-MB-00
- 主计算机: Intel NUC(Intel i7 CPU @ 3.20GHz,16GB RAM)
环境描述
-
Main Campus:
- 类型: 密集学术环境(结构化路径、建筑物和行人区)
- 总轨迹长度: 约7.4公里
- 各机器人轨迹长度:
- robot1: 1295.96 m
- robot2: 1360.43 m
- robot3: 1816.76 m
- robot4: 2971.38 m
-
Kittredge Loop:
- 类型: 开放多变户外区域(非约束地形、动态物体、停放车辆)
- 总轨迹长度: 约9.3公里
- 各机器人轨迹长度:
- robot1: 1136.41 m
- robot2: 1373.37 m
- robot3: 2792.06 m
- robot4: 4005.75 m
位置信息
- 地址: 1111 Engineering Dr, ECES 116, Computer Science Department, University of Colorado, Boulder, 80309, CO, U.S.A.
相关链接
- GitHub: https://arpg.github.io/cumulti
- 下载数据集: https://arpg.github.io/cumulti
搜集汇总
数据集介绍
构建方式
CU-Multi数据集通过精心设计的单机器人平台在科罗拉多大学博尔德分校的两个大型室外环境中进行多日数据采集,构建了四组同步运行的轨迹数据。采用精确的时间同步协议(PTP)确保激光雷达与IMU数据的时间对齐,并通过RTK GPS与LIO-SAM算法融合生成厘米级精度的里程计。数据集通过固定起始点轮挡校准和OpenStreetMap地理对齐,实现了跨轨迹的空间一致性,同时采用两阶段激光雷达标注流程——基于CENet网络的零样本语义推断与OSM标签过滤,解决了大规模点云标注的难题。
特点
该数据集的核心特点在于其系统性设计的轨迹重叠策略,通过四组机器人轨迹的嵌套关系(T1≈T2⊆T3⊆T4)实现20%-80%的可控空间冗余度,模拟真实多机器人系统的观测多样性。包含64线Ouster激光雷达、RealSense D455 RGB-D相机和微应变G7 IMU等多模态传感器数据,所有激光雷达扫描均附带SemanticKITTI标准的语义标注。独特的汇合点设计使各轨迹终点在4米半径内收敛,为多机器人协同定位提供天然验证场景。16.7公里总轨迹长度和明确的重叠量化指标(表IV)使其成为目前最具结构化的多机器人评估基准。
使用方法
研究者可通过数据集官网获取ROS/ROS2/MCAP格式的标准化数据包,利用提供的Python工具链进行快速部署。典型应用包括:基于轨迹重叠比例的子集选择以验证不同数据关联算法的鲁棒性;借助精确地理对齐和语义标签开发跨视角地图融合算法;利用汇合点处的多机器人同步观测测试闭环检测性能。数据集层级目录结构(图5)明确区分校准参数、原始传感器数据与标注结果,支持模块化调用。建议结合随附的轨迹重叠热力图(表IV)设计实验,系统评估算法在不同空间关联度下的表现。
背景与挑战
背景概述
CU-Multi数据集由科罗拉多大学博尔德分校的自主机器人与感知研究团队于2025年发布,旨在解决多机器人系统中时空数据关联的核心挑战。作为首个系统控制轨迹重叠率并配备密集语义标注的户外多机器人数据集,其通过单平台多航次同步采集策略,在校园环境中构建了包含16.7公里轨迹、RGB-D、高精度GPS和标注LiDAR的多模态数据。该数据集突破了传统单机器人轨迹分割模拟的局限性,为协同SLAM、地图融合等算法提供了真实场景下的评估基准,推动了分布式感知研究从仿真验证向现实应用的跨越。
当前挑战
多机器人数据关联面临观测独立性缺失与真实重叠模拟的双重挑战。传统单机器人轨迹分割方法难以复现实际多机系统中视角差异、光照变化等关键因素,导致算法评估失真。CU-Multi构建过程中需解决航次间厘米级位姿对齐、动态环境数据一致性保持等难题,其语义标注环节采用零样本推理与地理信息融合的两阶段方案,以应对大规模点云标注成本过高的问题。数据集设计需平衡轨迹重叠率控制与场景多样性,这对传感器同步精度和采集路径规划提出了极高要求。
常用场景
经典使用场景
在多机器人系统(MRS)的研究中,CU-Multi数据集被广泛应用于评估多机器人数据关联算法的性能。该数据集通过精心设计的轨迹重叠和多样化的观测视角,为研究者提供了一个真实的测试平台,用于验证协同SLAM(C-SLAM)、地图合并和机器人间闭环检测等关键技术的有效性。其丰富的传感器数据(包括RGB-D、GPS和语义标注的LiDAR)使得它成为多机器人感知数据融合研究的理想选择。
解决学术问题
CU-Multi数据集解决了多机器人系统中数据关联的核心挑战,即如何将独立采集的感知数据在时空上进行对齐。传统的单机器人轨迹分割方法无法真实反映多机器人系统的观测多样性,而CU-Multi通过控制轨迹重叠和引入密集的LiDAR标注,填补了这一空白。该数据集为研究者提供了一个标准化的评估基准,推动了多机器人SLAM和地图合并算法的进步。
衍生相关工作
CU-Multi数据集衍生了一系列经典的多机器人研究,包括协同SLAM框架(如Kimera-Multi和SWARM-SLAM)、地图合并算法(如FRAME和AutoMerge)以及机器人间闭环检测技术(如Wi-Closure)。这些工作充分利用了CU-Multi的轨迹重叠设计和语义标注,推动了多机器人系统在复杂环境中的鲁棒性和可扩展性研究。
以上内容由遇见数据集搜集并总结生成


