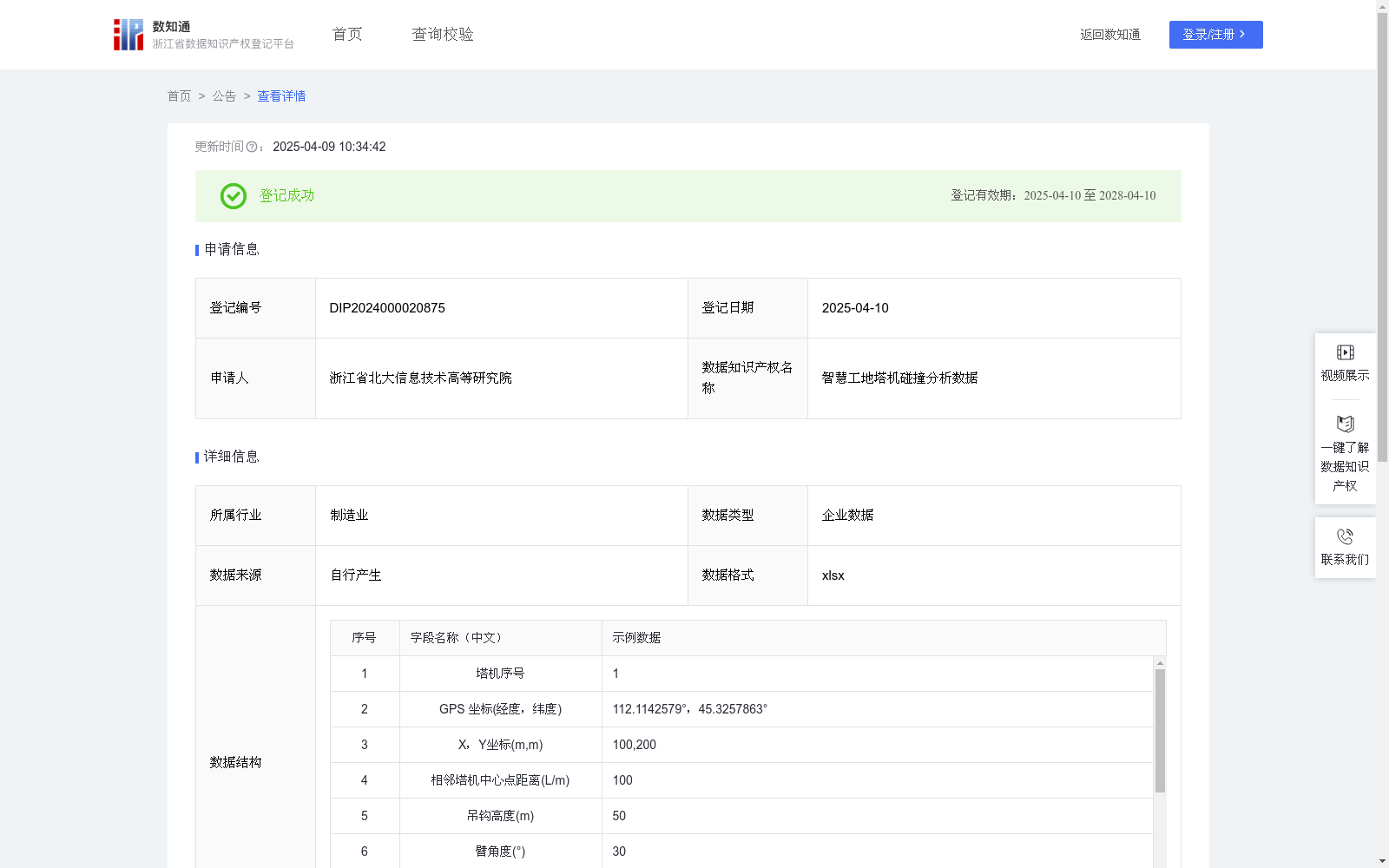
智慧工地塔机碰撞分析数据
收藏浙江省数据知识产权登记平台2025-04-09 更新2025-04-10 收录
下载链接:
https://www.zjip.org.cn/home/announce/trends/122600
下载链接
链接失效反馈官方服务:
资源简介:
在智慧工地中,多台智能塔机通常需要在同一作业区域内进行同步高空作业。为了防止塔机间发生碰撞,获取并分析塔机之间的碰撞数据至关重要。这一数据能够实时检测塔机的相对位置和运动轨迹,判断是否存在潜在的碰撞风险,从而及时调整作业路径或作业计划,避免事故发生。
此外,碰撞分析数据不仅服务于实时监控和预警,还具备重要的历史数据复用价值。通过对历史碰撞数据的分析,可以挖掘出塔机调度和路径规划中的潜在问题,帮助工程管理人员进行作业流程的优化和安全评估。历史数据的积累与分析还能为后续项目提供参考依据,支持持续优化塔机作业的调度策略和安全预防措施,从而有效提升整体工地的安全管理水平。
通过智慧工地中的GPS传感器获取每台塔机的经纬度信息,并记录获取数据的时间点为t。将每台塔机的经纬度信息换算为智慧工地的二维坐标(X,Y),在二维坐标体系内计算相邻塔机中心点距离L;根据吊钩高度、塔臂角度、塔臂长度和小车位置等数据,在时间点t建立单塔机维度的二维坐标(x,y),并将单塔机坐标下塔臂顶点的坐标、塔臂长度、塔臂角度、小车位置等投射到工地坐标(X,Y)上,计算投射后的塔臂顶点、小车位置、吊钩位置到坐标原点的距离△x;若相邻塔机高度相同,计算塔臂顶点到塔机坐标原点的距离△xb1、△xb2,若|△xb1+△xb2<L,则没有发生碰撞,若|△xb1+△xb12≥L,则发生碰撞。若相邻塔机高度不同,计算小车位置或吊钩位置到坐标原点的距离△xC1、△xC2、△xd1、△xd1,若|△xc1/d1+△xc2、d2|<L,则没有发生碰撞,若|△xc1/d1+△xc2、d2|≥L,则发生碰撞。每个时间字段下判断碰撞的算法规则是相同的,碰撞判断是基于每个时刻(t)实时计算的。随着时间的变化,塔机的相对位置和作业状态也在变化,因此每个时刻的碰撞判断结果会有所不同。通过对一段连续时间段内每个时刻的分析结果进行汇总,可以得出塔机是否发生碰撞的整体判断,并为后续的塔机调度和作业路径优化提供数据支持。
提供机构:
浙江省北大信息技术高等研究院
创建时间:
2024-12-04
搜集汇总
数据集介绍
背景与挑战
背景概述
智慧工地塔机碰撞分析数据是一个包含619条记录的企业数据集,每月更新,数据格式为xlsx。该数据集通过GPS传感器获取塔机位置信息,结合吊钩高度、塔臂角度等参数,实时计算塔机间的碰撞风险,应用于智慧工地的实时监控和作业优化。
以上内容由遇见数据集搜集并总结生成


