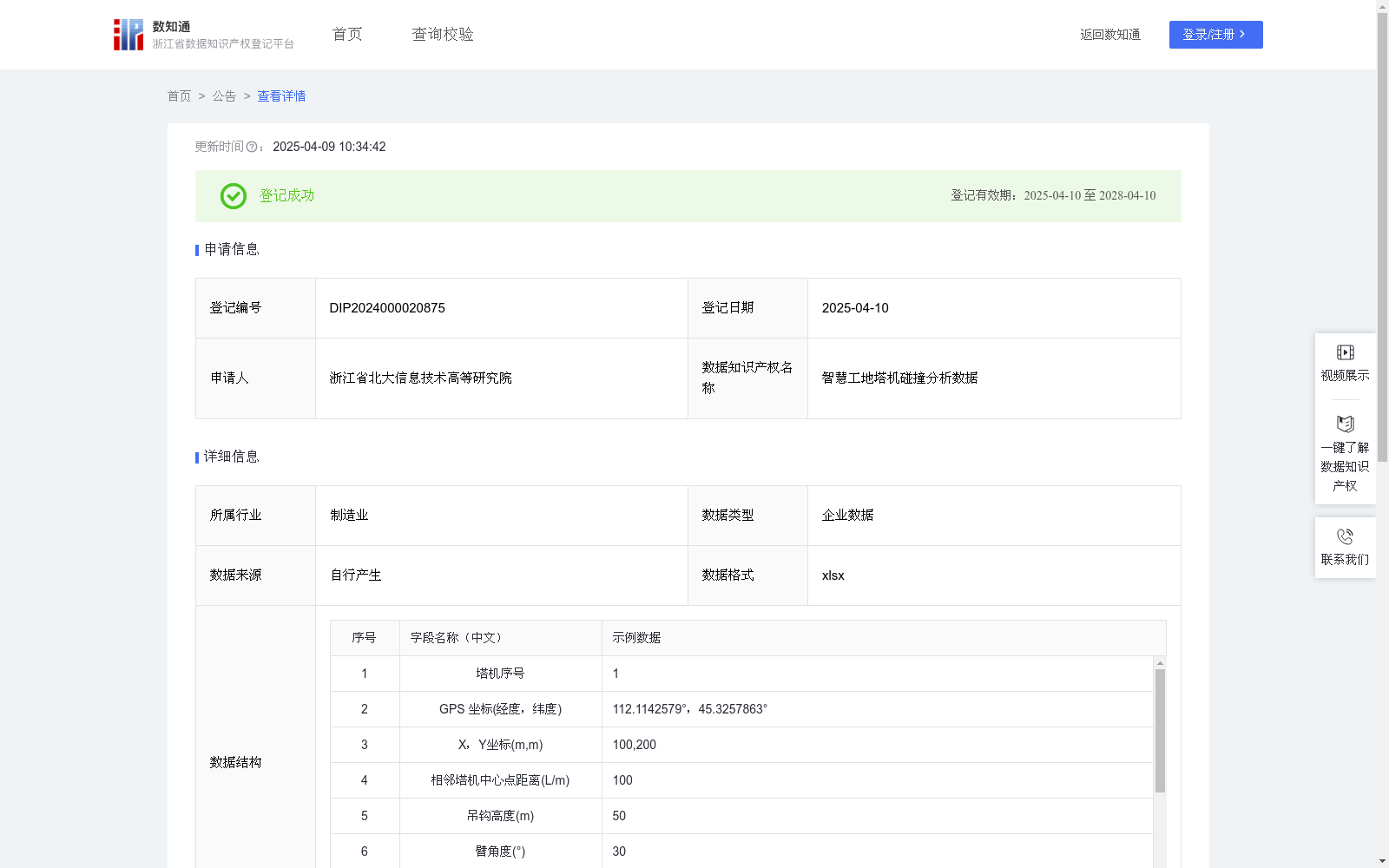
智慧工地塔机碰撞分析数据
收藏浙江省数据知识产权登记平台2025-04-09 更新2025-04-10 收录
下载链接:
https://www.zjip.org.cn/home/announce/trends/122600
下载链接
链接失效反馈官方服务:
资源简介:
在智慧工地中,多台智能塔机通常需要在同一作业区域内进行同步高空作业。为了防止塔机间发生碰撞,获取并分析塔机之间的碰撞数据至关重要。这一数据能够实时检测塔机的相对位置和运动轨迹,判断是否存在潜在的碰撞风险,从而及时调整作业路径或作业计划,避免事故发生。
此外,碰撞分析数据不仅服务于实时监控和预警,还具备重要的历史数据复用价值。通过对历史碰撞数据的分析,可以挖掘出塔机调度和路径规划中的潜在问题,帮助工程管理人员进行作业流程的优化和安全评估。历史数据的积累与分析还能为后续项目提供参考依据,支持持续优化塔机作业的调度策略和安全预防措施,从而有效提升整体工地的安全管理水平。
通过智慧工地中的GPS传感器获取每台塔机的经纬度信息,并记录获取数据的时间点为t。将每台塔机的经纬度信息换算为智慧工地的二维坐标(X,Y),在二维坐标体系内计算相邻塔机中心点距离L;根据吊钩高度、塔臂角度、塔臂长度和小车位置等数据,在时间点t建立单塔机维度的二维坐标(x,y),并将单塔机坐标下塔臂顶点的坐标、塔臂长度、塔臂角度、小车位置等投射到工地坐标(X,Y)上,计算投射后的塔臂顶点、小车位置、吊钩位置到坐标原点的距离△x;若相邻塔机高度相同,计算塔臂顶点到塔机坐标原点的距离△xb1、△xb2,若|△xb1+△xb2<L,则没有发生碰撞,若|△xb1+△xb12≥L,则发生碰撞。若相邻塔机高度不同,计算小车位置或吊钩位置到坐标原点的距离△xC1、△xC2、△xd1、△xd1,若|△xc1/d1+△xc2、d2|<L,则没有发生碰撞,若|△xc1/d1+△xc2、d2|≥L,则发生碰撞。每个时间字段下判断碰撞的算法规则是相同的,碰撞判断是基于每个时刻(t)实时计算的。随着时间的变化,塔机的相对位置和作业状态也在变化,因此每个时刻的碰撞判断结果会有所不同。通过对一段连续时间段内每个时刻的分析结果进行汇总,可以得出塔机是否发生碰撞的整体判断,并为后续的塔机调度和作业路径优化提供数据支持。
In smart construction sites, multiple intelligent tower cranes often perform synchronized high-altitude operations within the same work area. To prevent collisions between cranes, it is critical to acquire and analyze collision-related data between tower cranes. This data enables real-time detection of the relative positions and motion trajectories of the cranes, identifies potential collision risks, and allows timely adjustments to operation paths or plans to avoid accidents.
Furthermore, collision analysis data not only supports real-time monitoring and early warning but also holds significant value for historical data reuse. By analyzing historical collision data, potential issues in crane scheduling and path planning can be identified, assisting construction managers in optimizing operation processes and conducting safety assessments. The accumulation and analysis of historical data can also provide reference for subsequent projects, supporting the continuous optimization of crane operation scheduling strategies and safety prevention measures, thereby effectively improving the overall safety management level of the construction site.
Longitude and latitude information of each tower crane is collected via GPS sensors installed on the smart construction site, with the data acquisition timestamp recorded as t. The longitude and latitude data of each crane is converted to 2D coordinates (X, Y) within the smart construction site’s coordinate system, and the distance L between the centers of adjacent cranes is calculated in this 2D coordinate system. Based on data such as hook height, boom angle, boom length, and trolley position, a 2D coordinate (x, y) for individual tower cranes is established at timestamp t. Coordinates of the boom tip, boom length, boom angle, and trolley position under the individual crane’s coordinate system are projected onto the site’s global coordinate system (X, Y), and the distances Δx from the projected boom tip, trolley position, and hook position to the coordinate origin are calculated.
If adjacent cranes have the same height, calculate the distances Δxb1 and Δxb2 from the boom tip to the coordinate origin of each crane. A collision is determined not to occur if |Δxb1 + Δxb2| < L; otherwise, a collision is deemed to have occurred. If adjacent cranes have different heights, calculate the distances ΔxC1, ΔxC2, Δxd1, and Δxd2 from the trolley position or hook position to the coordinate origin. A collision is determined not to occur if |ΔxC1/d1 + ΔxC2/d2| < L; otherwise, a collision is deemed to have occurred.
The collision detection algorithm rules are identical for each timestamp. Collision determination is calculated in real-time at each moment t. As time passes, the relative positions and operation states of the cranes change, so the collision detection results at each moment may vary. By aggregating the analysis results for each moment within a continuous time period, an overall judgment of whether a collision occurred between the cranes can be made, providing data support for subsequent crane scheduling and operation path optimization.
提供机构:
浙江省北大信息技术高等研究院
创建时间:
2024-12-04
搜集汇总
数据集介绍
背景与挑战
背景概述
智慧工地塔机碰撞分析数据是一个包含619条记录的企业数据集,每月更新,数据格式为xlsx。该数据集通过GPS传感器获取塔机位置信息,结合吊钩高度、塔臂角度等参数,实时计算塔机间的碰撞风险,应用于智慧工地的实时监控和作业优化。
以上内容由遇见数据集搜集并总结生成


