Global Navigation Dataset (GND)
收藏arXiv2024-09-22 更新2024-09-26 收录
下载链接:
https://cs.gmu.edu/~xiao/Research/GND/
下载链接
链接失效反馈官方服务:
资源简介:
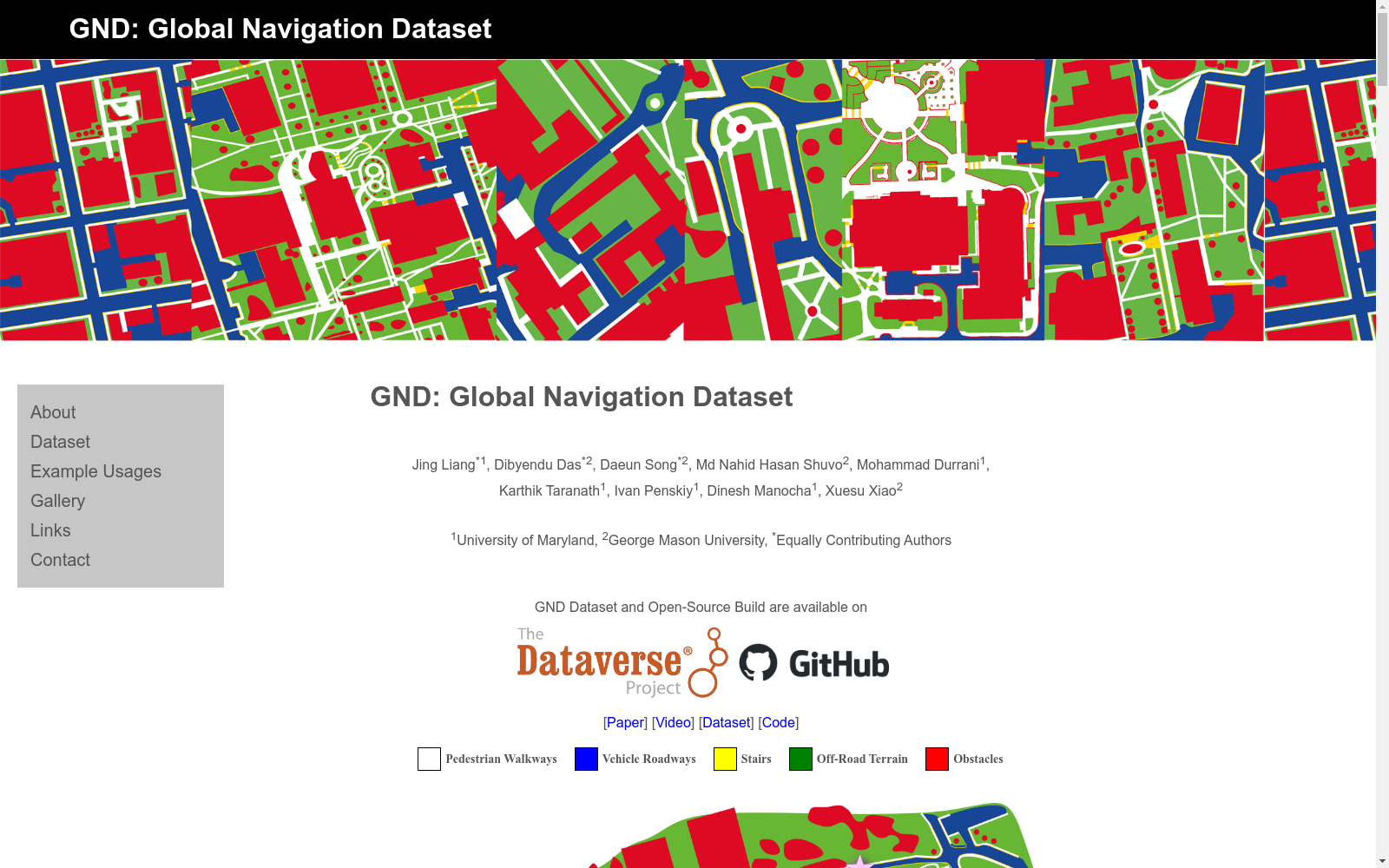
全球导航数据集(GND)是由马里兰大学和乔治梅森大学联合创建的大型户外校园导航数据集。该数据集整合了多模态感知数据,包括3D LiDAR点云、RGB和360°图像,以及多类别可穿越性地图,涵盖了十个大学校园的多种环境。数据集总面积约2.7平方公里,包含至少350栋建筑,记录了11小时的导航数据。创建过程中,数据通过两台Clearpath Jackal机器人采集,并经过标准化处理生成全球校园地图。GND旨在解决全球机器人导航中的复杂推理问题,支持基于地图和无地图的导航以及全球地点识别等应用。
The Global Navigation Dataset (GND) is a large-scale outdoor campus navigation dataset jointly developed by the University of Maryland and George Mason University. This dataset integrates multi-modal perceptual data, including 3D LiDAR point clouds, RGB and 360° images, as well as multi-class traversability maps, covering diverse environments across ten university campuses. It spans a total area of approximately 2.7 square kilometers, encompasses at least 350 buildings, and records 11 hours of navigation data. During its creation, data was collected by two Clearpath Jackal robots and standardized to generate global campus maps. GND aims to address complex reasoning challenges in global robotic navigation, supporting applications such as map-based and map-free navigation as well as global place recognition.
提供机构:
马里兰大学,乔治梅森大学
创建时间:
2024-09-22
搜集汇总
数据集介绍
构建方式
Global Navigation Dataset (GND) 的构建方式体现了对大规模户外环境导航需求的深刻理解。该数据集通过整合多模态感知数据,包括3D LiDAR点云、RGB和360°图像,以及多类别可穿越性地图,覆盖了十个大学校园的环境。这些环境包括公园、城市设置、地形变化和不同规模的校园布局。数据集的总覆盖面积约为2.7平方公里,包含至少350座建筑物。通过使用Clearpath Jackal机器人,结合3D LiDAR、RGB和360°相机、IMU和GPS等传感器,收集了长达11小时的导航数据。所有感知数据经过后处理,生成包含五种可穿越性类别(行人步道、车辆道路、楼梯、越野地形和障碍物)的全球校园地图,并与多模态感知数据关联。
使用方法
GND 数据集的使用方法多样,适用于多种机器人导航任务。研究者可以利用数据集中的多模态感知数据和可穿越性地图,进行地图基础的全球导航研究,通过路径规划算法如A*或RRT*生成导航路径。对于无地图导航,数据集提供了丰富的环境感知数据,支持基于学习的导航算法,如MTG和T-MTG,这些算法能够生成适应不同可穿越性级别的导航轨迹。此外,GND 还支持全球地点识别任务,通过360°图像数据和视觉导航算法,如NoMaD,实现目标导向的导航。数据集的标准化处理流程和详细的文档,使得研究者能够轻松地进行数据处理和实验,推动机器人导航技术的发展。
背景与挑战
背景概述
全球导航数据集(Global Navigation Dataset, GND)由马里兰大学和乔治梅森大学的研究人员于2024年创建,旨在解决户外校园环境中复杂的多模态感知和多类别可通行性问题。该数据集整合了3D LiDAR点云、RGB和360°图像等多模态传感器数据,并提供了包括人行道、车行道、楼梯、越野地形和障碍物在内的多类别可通行性地图。GND覆盖了约2.7平方公里的面积,包含至少350座建筑物,涵盖了多种公园、城市设置、海拔变化和不同规模的校园布局。该数据集不仅为全球机器人导航提供了丰富的数据支持,还展示了其在基于地图的导航、无地图导航和全球地点识别等应用中的潜力。
当前挑战
GND在构建过程中面临多项挑战。首先,全球导航需要在复杂户外场景中对多种环境因素进行推理,包括地形特征的识别和可通行性分析。其次,导航决策需超越简单的障碍物和自由空间,考虑不同机器人形态的可通行性。此外,数据集的构建需要处理大规模环境中的多模态传感器数据,确保数据的准确性和一致性。尽管现有数据集在感知和导航任务中表现出色,但它们在提供全球导航和可通行性信息方面仍显不足。GND通过提供丰富的多模态机器人感知数据和人类标注的多类别可通行性地图,填补了这一空白。
常用场景
经典使用场景
全球导航数据集(GND)在户外校园环境中广泛应用于多模态感知和多类别可通行性分析。该数据集通过整合3D LiDAR点云、RGB和360°图像以及多类别可通行性地图,为机器人提供复杂环境中的导航能力。经典使用场景包括基于地图的全局导航、无地图导航以及全局地点识别,这些应用展示了GND在不同类型机器人(如轮式和腿式机器人)中的实用性。
解决学术问题
GND数据集解决了全球导航中的多个学术研究问题,特别是在复杂户外环境中进行大规模导航推理的需求。它通过提供多模态感知数据和多类别可通行性地图,弥补了现有数据集在全局导航和可通行性分析方面的不足。GND的意义在于推动机器人导航技术的发展,使其能够像人类一样在未知环境中进行常识性推理和导航。
实际应用
在实际应用中,GND数据集被广泛用于自动驾驶、远程探索和最后一英里配送等任务。通过提供详细的可通行性地图和多模态感知数据,GND帮助机器人更好地理解和适应复杂环境,从而提高导航的准确性和效率。例如,在大学校园内的自动驾驶车辆可以通过GND数据集进行路径规划和实时导航,确保安全高效地完成任务。
数据集最近研究
最新研究方向
在户外校园环境中的全球导航领域,Global Navigation Dataset (GND) 数据集的最新研究方向主要集中在多模态感知与多类别可穿越性分析的整合。该数据集通过集成3D LiDAR点云、RGB和360°图像等多模态传感器数据,以及涵盖行人步道、车辆道路、楼梯、越野地形和障碍物等多类别可穿越性地图,为机器人提供了在复杂户外环境中进行导航所需的全面信息。研究者们正利用GND数据集开发新的应用,如基于地图的全球导航、无地图导航和全球地点识别,以提升机器人在大规模户外环境中的自主导航能力。此外,GND数据集的标准化数据处理流程和开放共享策略,也鼓励了更广泛的研究社区参与,推动了全球机器人导航技术的进步。
相关研究论文
- 1GND: Global Navigation Dataset with Multi-Modal Perception and Multi-Category Traversability in Outdoor Campus Environments马里兰大学,乔治梅森大学 · 2024年
以上内容由遇见数据集搜集并总结生成


