2021中国地市级每十万人死亡失踪人口数据集
收藏地球大数据科学工程2024-03-04 收录
下载链接:
https://data.casearth.cn/sdo/detail/653884fc819aec0f26f4a55d
下载链接
链接失效反馈资源简介:
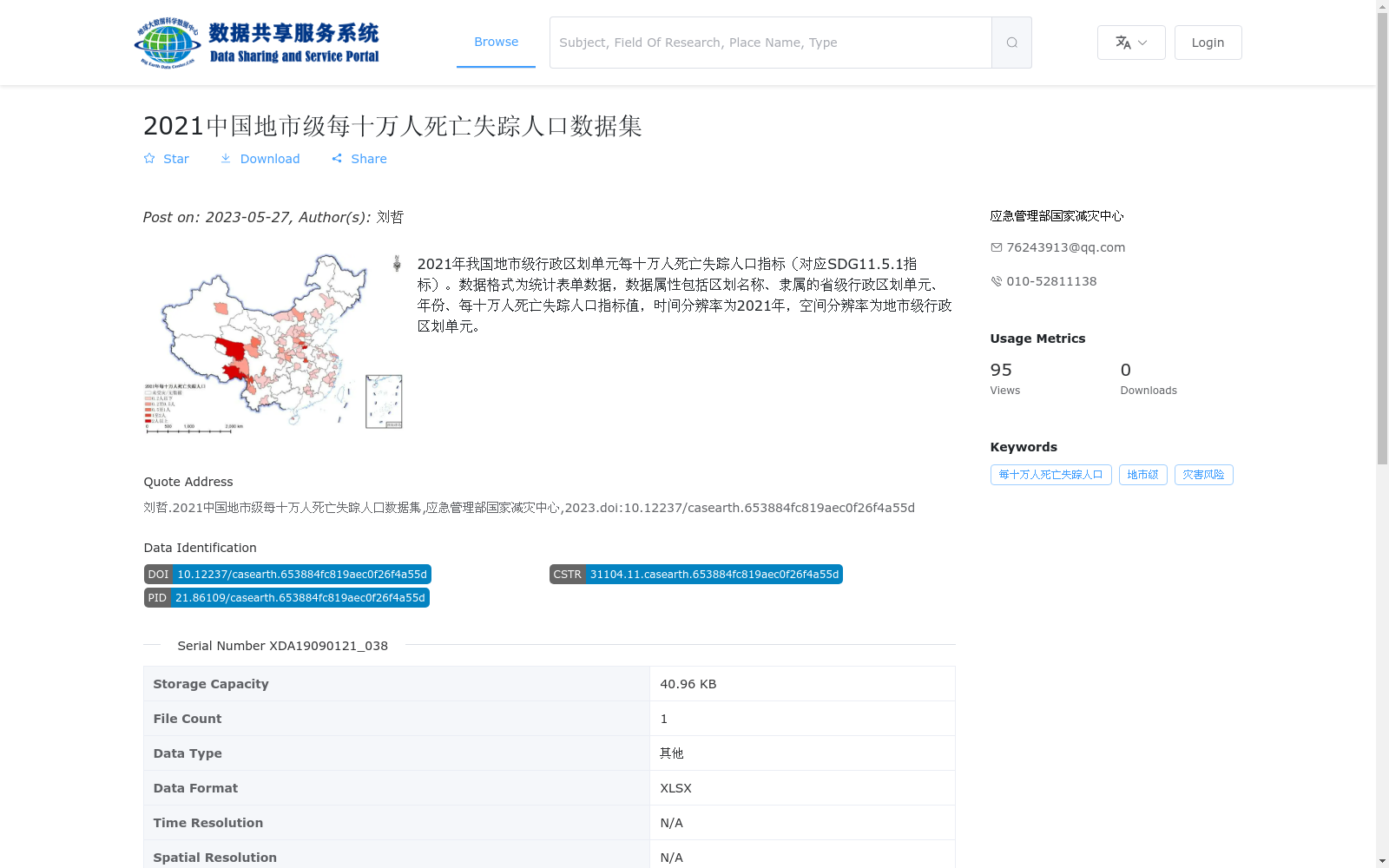
2021年我国地市级行政区划单元每十万人死亡失踪人口指标(对应SDG11.5.1指标)。数据格式为统计表单数据,数据属性包括区划名称、隶属的省级行政区划单元、年份、每十万人死亡失踪人口指标值,时间分辨率为2021年,空间分辨率为地市级行政区划单元。
提供机构:
应急管理部国家减灾中心
AI搜集汇总
数据集介绍
背景与挑战
背景概述
该数据集提供了2021年中国地市级行政区划单元每十万人死亡失踪人口指标(SDG11.5.1指标),包含区划名称、隶属省级行政区划单元、年份和指标值,数据格式为XLSX,时间分辨率为2021年,空间分辨率为地市级行政区划单元。
以上内容由AI搜集并总结生成


