MuSHRoom
收藏arXiv2024-03-19 更新2024-06-21 收录
下载链接:
https://xuqianren.github.io/publications/MuSHRoom/
下载链接
链接失效反馈官方服务:
资源简介:
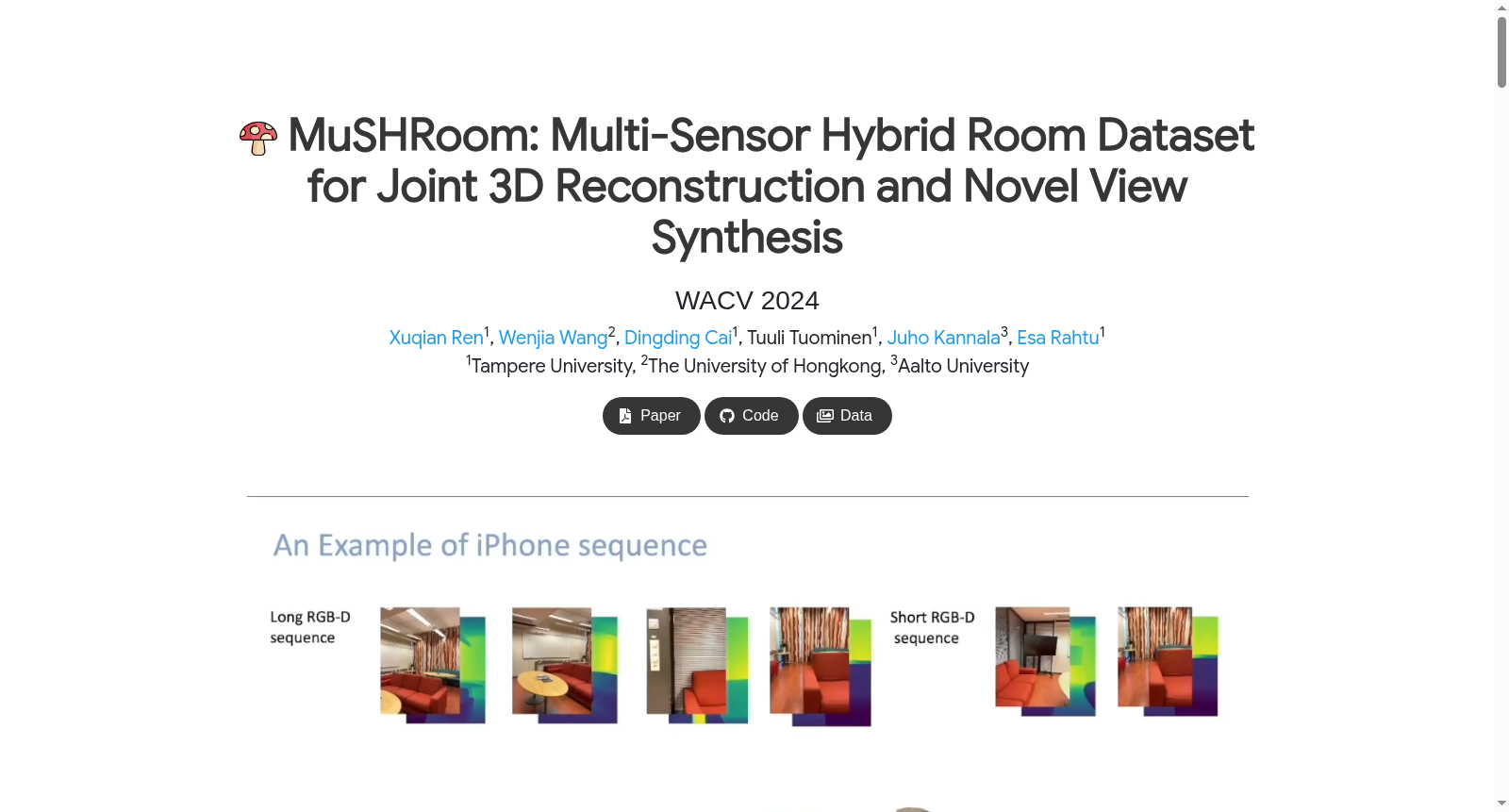
MuSHRoom数据集由坦佩雷大学等机构创建,专注于室内房间规模的场景,包含10个真实世界房间的数据。每个房间使用Kinect和iPhone等消费级设备捕捉RGB-D序列,并使用Faro扫描仪获取精确的地面实况网格模型。数据集旨在为房间规模的3D重建和新视角合成提供基准,解决现有数据集在几何重建和照片级真实感建模方面的不足。MuSHRoom数据集通过模拟VR/AR应用场景,提出了包括遮挡、运动模糊、反射、透明度和光照变化等实际挑战,推动了在消费级设备上进行鲁棒和沉浸式建模与渲染技术的发展。
The MuSHRoom dataset was developed by Tampere University and other research institutions, focusing on indoor room-scale scenarios, and comprises data collected from 10 real-world rooms. For each room, RGB-D sequences were captured using consumer-grade devices such as Kinect and iPhone, while precise ground-truth mesh models were acquired via a Faro scanner. The dataset is designed as a benchmark for room-scale 3D reconstruction and novel view synthesis, addressing the shortcomings of existing datasets in geometric reconstruction and photorealistic modeling. By simulating VR/AR application scenarios, the MuSHRoom dataset introduces practical challenges including occlusion, motion blur, reflection, transparency and illumination variations, promoting the development of robust and immersive modeling and rendering technologies on consumer-grade devices.
提供机构:
坦佩雷大学, 芬兰
创建时间:
2023-11-06
搜集汇总
数据集介绍
构建方式
在三维视觉与沉浸式技术融合发展的背景下,MuSHRoom数据集通过多传感器混合采集策略构建而成。该数据集涵盖十个真实室内场景,每个场景均采用消费级设备Azure Kinect和iPhone 12 Pro Max分别采集一条长序列与一条短序列RGB-D数据,以模拟典型VR/AR应用中的扫描与交互轨迹。几何真值则通过工业级Faro激光扫描仪从多个站位获取高精度点云,并经由Reality Capture软件重建为网格模型,再经MeshLab与Blender人工精修以消除遮挡与反射带来的伪影。Kinect序列使用Spectacular AI SDK融合IMU数据提取相机位姿,并通过z-buffer渲染补全深度缺失区域;iPhone序列则借助Polycam应用获取位姿,并利用COLMAP进行全局捆集调整与序列配准,最终形成包含对齐位姿、点云及网格真值的完整数据流。
特点
MuSHRoom数据集的核心特点在于其面向真实世界挑战的多维度复杂性。数据采集涵盖多样化的室内布局、光照条件与物体材质,天然包含稀疏观测、运动模糊、镜面反射、透明表面及大范围光照变化等难题,为算法鲁棒性评估提供了贴近实际的测试环境。区别于现有数据集,MuSHRoom创新性地采用长短序列分离的评估协议:以长序列为训练集,独立采集的短序列为测试集,模拟用户首次扫描房间后从随机视点进行渲染的AR/VR应用场景,从而推动模型在视角泛化与几何一致性方面的进步。此外,数据集同时提供消费级传感器数据与高精度网格真值,支持三维重建与新颖视图合成任务的联合量化评估,填补了该领域基准数据的空白。
使用方法
该数据集主要用于推动三维重建与新颖视图合成统一框架的研发与评测。研究者可利用提供的RGB-D序列、相机位姿及点云数据,训练端到端的联合建模与渲染模型。在评估阶段,重建质量通过采样点云与真值网格间的Chamfer距离、法向一致性及F-score等几何指标衡量;渲染质量则依据PSNR、SSIM与LPIPS等图像相似度指标,分别在单序列内均匀采样测试与跨序列测试两种协议下进行。数据集附带的基准代码实现了网格裁剪对齐、指标计算等流程,确保评估的一致性与可复现性。通过此种结构化评测,MuSHRoom旨在促进能够兼顾几何精度与视觉沉浸感、且适应消费级硬件的高效算法发展。
背景与挑战
背景概述
随着元宇宙技术的蓬勃发展,对消费级硬件上实现精准、实时且沉浸式的三维场景建模需求日益迫切,这既服务于无人机、机器人等非人类感知任务,也支撑着增强现实与虚拟现实等沉浸式体验,要求模型兼具几何结构精确性与视觉真实感。然而,现有研究在如何将几何重建与逼真建模(即新视角合成)统一于同一框架方面存在知识空白。为填补这一空白并推动基于消费级设备的鲁棒沉浸式建模与渲染技术发展,由芬兰坦佩雷大学、阿尔托大学及中国香港大学的研究团队于2024年联合提出了MuSHRoom数据集。该数据集聚焦室内房间尺度场景,通过融合Azure Kinect、iPhone等消费级设备的RGB-D序列与Faro激光扫描仪获取的高精度网格真值,旨在为联合三维重建与新视角合成任务提供基准评测平台,对推动VR/AR、机器人导航等领域的算法进步具有显著影响力。
当前挑战
MuSHRoom数据集所应对的核心领域挑战在于实现三维重建与新视角合成两大任务的联合优化与统一评估,这要求算法在消费级设备采集的噪声数据上保持鲁棒性,并能以端到端方式高效学习。在数据集构建过程中,研究团队面临多重实际挑战:其一,数据稀疏性与遮挡问题,由于关键帧采样策略及室内布局复杂,导致许多物体背面难以捕捉,重建时易产生伪影;其二,传感器噪声与动态干扰,包括因手持抖动引起的运动模糊、金属与镜面表面的反射失真、透明物体导致的深度值失效,以及室内光照不均带来的大幅亮度变化,这些因素均对几何与外观学习构成严峻考验;其三,评估协议的设计挑战,为模拟真实AR/VR应用场景,数据集采用长序列训练、短序列测试的评估模式,两者在相机位姿与视角上存在显著差异,对算法的泛化与鲁棒性提出了更高要求。
常用场景
经典使用场景
在三维视觉与计算机图形学领域,室内场景的数字化建模是构建沉浸式虚拟环境的核心基础。MuSHRoom数据集通过整合消费级设备(Kinect与iPhone)采集的RGB-D序列与工业级激光扫描仪生成的高精度网格真值,为联合三维重建与新颖视图合成任务提供了标准化的评估基准。其经典使用场景在于模拟典型的增强现实与虚拟现实应用流程:研究者可利用长序列数据训练模型,再通过独立采集的短序列测试模型在未知视角下的几何重建精度与渲染真实感,从而评估算法在真实复杂环境中的泛化与鲁棒性能。
实际应用
该数据集的设计紧密贴合元宇宙技术对实时、精准、沉浸式建模的需求,其实际应用场景广泛覆盖非人类感知与人类交互领域。在机器人导航、无人机自主飞行或自动驾驶系统中,算法可利用该数据集训练模型,实现对室内环境几何结构的精确理解与实时定位。在增强现实与虚拟现实领域,开发者能够基于数据集训练渲染引擎,为用户提供从任意视角都能呈现高保真视觉效果的沉浸式体验,例如在虚拟家居设计、远程协作或文化遗产数字化展示中实现逼真的场景漫游与交互。
衍生相关工作
MuSHRoom数据集自发布以来,已成为推动三维视觉领域联合建模研究的重要催化剂。基于其构建的基准测试,催生了一系列旨在平衡几何准确性与渲染质量的新方法探索。相关工作广泛借鉴并对比了如Nerfstudio中的Nerfacto、Depth-Nerfacto、Splatfacto等专注于视图合成的管线,以及MonoSDF等基于符号距离函数的表面重建方法。这些工作通过在该数据集上的系统评估,揭示了现有方法在应对真实世界噪声、稀疏输入及大视角差异时的局限性,进而激励了后续研究向更鲁棒、更高效的统一框架发展,例如探索神经隐式表面与辐射场结合的更优表示方式。
以上内容由遇见数据集搜集并总结生成


