ARIO (All Robots In One)
收藏arXiv2024-08-20 更新2024-08-22 收录
下载链接:
https://imaei.github.io/project_pages/ario/
下载链接
链接失效反馈加速链接:
资源简介:
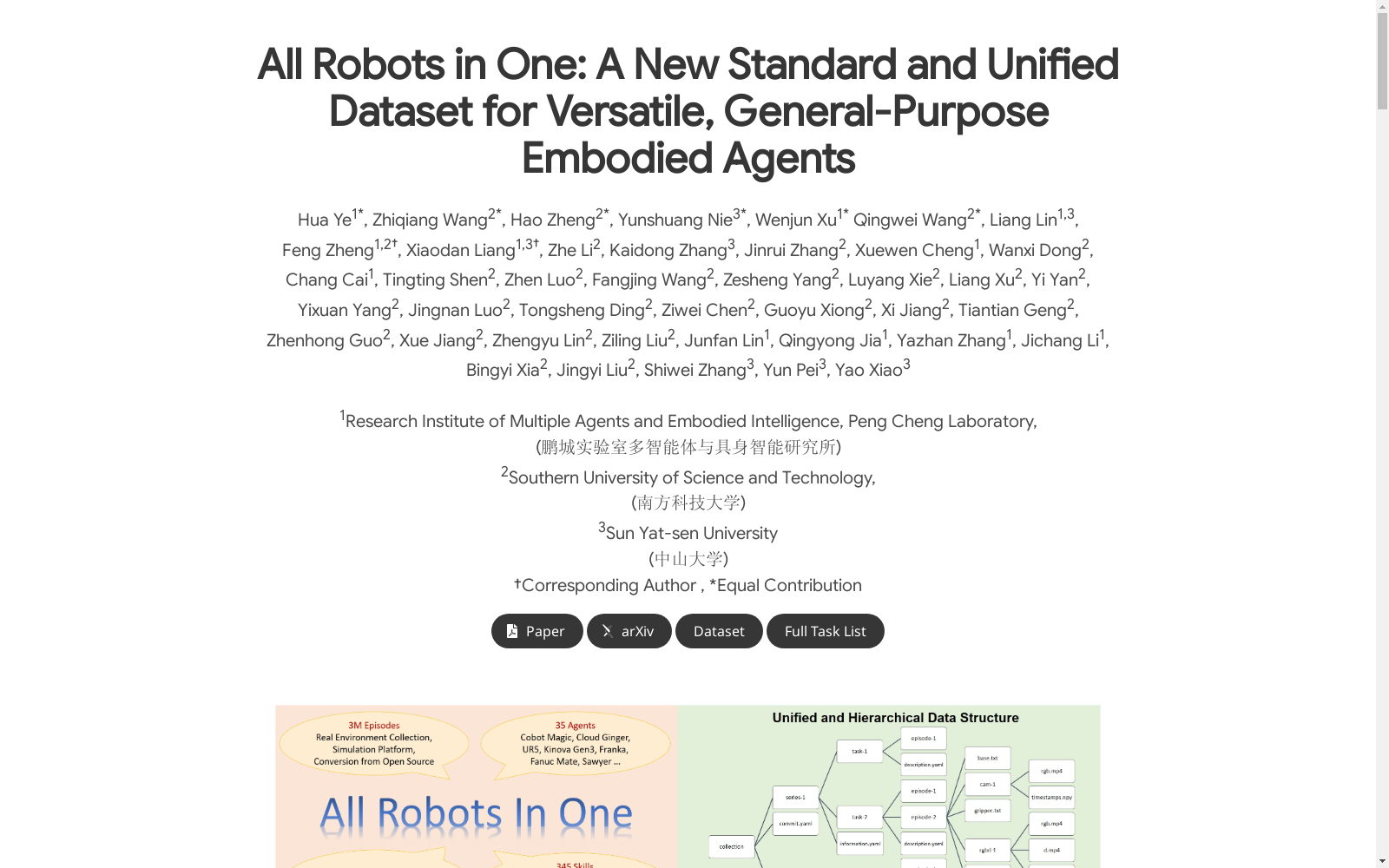
ARIO数据集由南方科技大学、中山大学和鹏城实验室联合创建,旨在为多用途、通用型具身智能代理提供标准化的数据格式。该数据集包含约300万条记录,涵盖258个系列和321,064个任务,结合了真实世界和模拟数据。创建过程中,数据集通过多平台收集、模拟生成和开源数据转换等方式构建。ARIO数据集的应用领域广泛,主要用于提高具身智能代理的鲁棒性和适应性,解决数据格式不统一、多样性不足和数据量不足等问题。
The ARIO dataset was jointly created by Southern University of Science and Technology, Sun Yat-sen University, and Peng Cheng Laboratory, aiming to provide standardized data formats for versatile, general-purpose embodied intelligent agents. This dataset contains approximately 3 million records, covering 258 series and 321,064 tasks, and combines real-world and simulated data. During its development, the dataset was constructed through methods including multi-platform data collection, simulated generation, and open-source data conversion. The ARIO dataset has a wide range of application scenarios, and is mainly used to improve the robustness and adaptability of embodied intelligent agents, addressing problems such as inconsistent data formats, insufficient diversity, and inadequate data volume.
提供机构:
南方科技大学、中山大学、鹏城实验室
创建时间:
2024-08-20
AI搜集汇总
数据集介绍
构建方式
ARIO数据集的构建基于多源数据整合策略,涵盖了真实世界数据采集、模拟平台数据生成以及开源数据集的转换。具体而言,真实世界数据通过自定义平台收集,模拟数据则利用Habitat、MuJoCo和SeaWave等平台生成,同时将现有的开源数据集如Open X-Embodiment、RH20T和ManiWAV转换为ARIO标准格式。这种多管齐下的方法确保了数据集的多样性和广泛性,从而为通用型具身智能体提供了丰富的训练资源。
特点
ARIO数据集的显著特点在于其综合性和统一性。它不仅包含了五种感官模态(图像、3D数据、声音、文本和触觉信息),还通过时间戳机制实现了多模态数据的对齐。此外,ARIO采用了清晰的系列-任务-片段结构,并提供了详细的文本描述,便于理解和使用。数据集的统一格式支持多种机器人形态和控制对象,简化了数据处理流程,并整合了模拟和真实世界数据,增强了数据集的泛化能力。
使用方法
使用ARIO数据集时,研究者可以利用其统一的数据格式和丰富的感官模态进行具身智能体的训练和测试。数据集的结构化设计使得数据加载和处理变得高效,而时间戳机制确保了多模态数据的时间一致性。此外,ARIO数据集的多样性和广泛性为跨平台和跨任务的泛化研究提供了有力支持。研究者可以通过访问项目网站获取详细的使用指南和数据访问权限,从而充分利用这一资源进行具身智能领域的创新研究。
背景与挑战
背景概述
随着具身人工智能(Embodied AI)的迅猛发展,人工智能系统与物理世界的交互方式正在发生深刻变革。然而,现有数据集在标准化格式、数据多样性和数据量方面存在显著不足,难以支持开发多功能、通用型的具身智能体。为应对这些挑战,Zhiqiang Wang等研究人员于2024年推出了ARIO(All Robots In One)数据集,该数据集由南方科技大学、中山大学和鹏城实验室共同开发。ARIO数据集通过提供统一的数据格式、全面的感知模态以及真实世界和模拟数据的结合,旨在提升具身AI智能体的训练效果,增强其在各种任务和环境中的鲁棒性和适应性。该数据集包含约300万条从258个系列和321,064个任务中收集的片段,为具身AI领域提供了重要的数据资源,推动了该领域的进一步发展。
当前挑战
ARIO数据集在构建过程中面临多项挑战。首先,具身智能体所需的数据集必须具备丰富的感知模态,而现有数据集在这方面存在明显不足,缺乏图像、3D视觉、文本、触觉和听觉输入的全面整合。其次,多机器人数据集缺乏统一格式,导致数据处理和加载复杂化。此外,不同机器人平台之间的控制对象表示不兼容,限制了数据集的通用性。最后,现有数据集在数据量上不足以支持大规模预训练,且缺乏结合模拟和真实数据的集,这对研究模拟到真实的差距至关重要。ARIO数据集通过引入统一的数据格式和时间戳机制,以及整合模拟和真实数据,有效应对了这些挑战,为具身AI的发展提供了坚实的基础。
常用场景
经典使用场景
ARIO数据集的经典使用场景在于其为多模态感知和多任务学习提供了丰富的数据支持。通过整合图像、3D视觉、声音、文本和触觉信息,ARIO数据集使得研究者能够训练出能够在复杂环境中执行多样化任务的通用型具身智能体。例如,该数据集可用于开发能够进行物体抓取、导航、语音交互和触觉反馈处理的机器人系统。
解决学术问题
ARIO数据集解决了现有具身智能数据集在标准化格式、数据多样性和数据量方面的不足。通过提供统一的数据格式和多模态数据,ARIO促进了具身智能体在不同任务和环境中的鲁棒性和适应性。此外,ARIO通过整合模拟和真实世界数据,帮助研究者解决模拟到现实之间的差距问题,推动了具身智能领域的研究进展。
衍生相关工作
ARIO数据集的推出催生了多项相关研究工作,特别是在多模态学习和跨平台学习领域。例如,基于ARIO数据集的研究已经开发出能够跨不同机器人平台迁移知识的模型,显著提高了机器人的通用性和适应性。此外,ARIO还促进了语言引导机器人学习和多模态感知模型的研究,推动了具身智能领域的技术进步。
以上内容由AI搜集并总结生成


