DrIFT
收藏arXiv2024-12-06 更新2024-12-10 收录
下载链接:
https://github.com/CARG-uOttawa/DrIFT.git
下载链接
链接失效反馈官方服务:
资源简介:
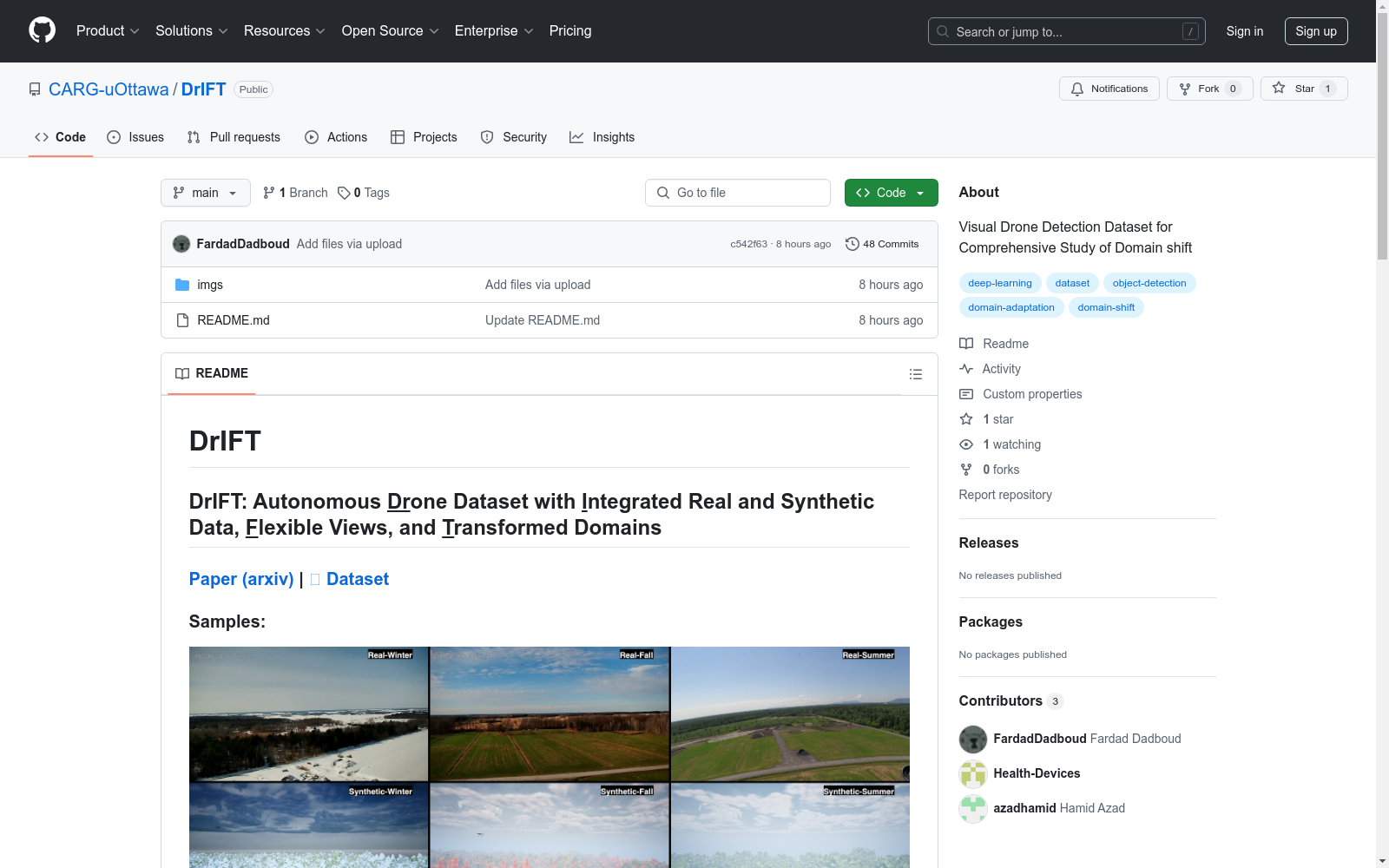
DrIFT数据集是由渥太华大学和加拿大国家研究委员会共同开发的视觉无人机检测数据集,专门用于研究在域偏移条件下的无人机检测。该数据集包含14个不同的域,涵盖了视角、合成到真实数据、季节和天气等多种域偏移类型。DrIFT数据集通过背景分割图强调背景偏移,提供了背景相关的评估指标。数据集的创建过程结合了真实和合成数据,确保了数据集在训练和验证集中的平衡分布。DrIFT数据集主要应用于无人机检测和无人驾驶领域,旨在解决环境变化、视角多样性和背景变化对无人机检测性能的影响。
The DrIFT dataset is a visual drone detection dataset jointly developed by the University of Ottawa and the National Research Council Canada, specifically designed for research on drone detection under domain shift conditions. This dataset contains 14 distinct domains, covering multiple types of domain shifts including viewpoints, synthetic-to-real data, seasons and weather conditions. The DrIFT dataset emphasizes background shifts via background segmentation maps and provides background-related evaluation metrics. The dataset's creation process combines real and synthetic data to ensure a balanced distribution in both training and validation sets. The DrIFT dataset is mainly applied in the fields of drone detection and autonomous driving, aiming to address the impacts of environmental changes, diverse viewpoints and background variations on drone detection performance.
提供机构:
渥太华大学,加拿大国家研究委员会
创建时间:
2024-12-06
搜集汇总
数据集介绍
构建方式
DrIFT数据集的构建方式独具匠心,通过集成真实与合成数据,涵盖了灵活的视角和变换的领域,以应对无人机视觉检测中的域偏移问题。该数据集包含了十四个不同的领域,每个领域都具有视角、合成到真实数据、季节和恶劣天气的偏移特征。特别地,DrIFT通过提供背景分割图来强调背景偏移,从而实现背景相关的评估指标。这种设计使得研究人员能够独立研究每个域偏移类型,确保数据集在多个域偏移类型上的系统性研究。
特点
DrIFT数据集的显著特点在于其多样的域偏移类型和背景分割图的引入。该数据集不仅涵盖了视角、合成到真实数据、季节和天气的偏移,还通过背景分割图提供了背景相关的评估指标,这使得背景偏移的影响能够被精确量化。此外,DrIFT还引入了一种新的不确定性评估方法,称为MCDO-map,该方法在捕获域偏移方面表现出色,且后处理复杂度较低。
使用方法
DrIFT数据集的使用方法多样,适用于视觉无人机检测的研究。研究人员可以通过该数据集进行域适应算法的研究,特别是无监督域适应(UDA)方法,以提高模型在不同域偏移情况下的鲁棒性。此外,DrIFT的背景分割图可以用于背景相关的评估指标,帮助研究人员更深入地理解背景偏移对检测性能的影响。数据集还支持不确定性评估方法的研究,如MCDO-map,这为不确定性感知的域适应提供了新的工具和视角。
背景与挑战
背景概述
随着无人驾驶飞行器(UAV),即无人机的普及,其在医疗、监控、物流、农业等多个领域的应用日益广泛。然而,无人机的广泛使用也引发了安全问题,如恶意使用和与其他空中物体的碰撞。因此,可靠的无人机视觉检测对于确保其在空域中的安全集成至关重要。然而,环境变化、视角差异和背景变化等因素导致的域偏移显著影响了无人机检测的准确性。为了应对这些挑战,渥太华大学和国家研究委员会加拿大分会的研究人员于2024年开发了DrIFT数据集,该数据集专门用于在域偏移条件下进行无人机视觉检测。DrIFT数据集包含了十四个不同的域,每个域都具有视角、合成数据到真实数据、季节和恶劣天气的偏移。该数据集的独特之处在于强调背景偏移,并提供了背景分割图,以实现背景相关的评估指标。
当前挑战
DrIFT数据集在构建过程中面临多个挑战。首先,无人机检测领域的问题包括远距离小物体检测、复杂背景处理以及区分无人机与其他视觉上相似的飞行物体。其次,构建过程中遇到的挑战包括环境变化、视角差异和背景变化导致的域偏移问题。为了解决这些问题,研究人员采用了无监督域适应(UDA)方法,通过从源域向目标域转移知识来应对目标域缺乏监督的问题。此外,数据集的构建还需要平衡训练和验证集的样本数量,确保数据集在不同域之间的分布均衡。最后,数据集的背景分割图的生成也是一个技术挑战,需要精确的背景分割技术来确保评估的准确性。
常用场景
经典使用场景
DrIFT数据集在视觉无人机检测领域中被广泛应用于解决由于环境变化、视角多样性和背景变化引起的域偏移问题。该数据集通过集成真实和合成数据,提供了十四种不同的域,每种域都具有视角、合成到真实数据、季节和天气的偏移。这种设计使得研究人员能够系统地研究这些偏移对无人机检测性能的影响,特别是在背景偏移方面,通过提供背景分割图来实现背景相关的评估指标。
实际应用
在实际应用中,DrIFT数据集被用于开发和验证能够在复杂环境中自主飞行的无人机检测系统。这些系统需要能够在不同季节、天气条件和视角下准确检测无人机,以确保公共安全和空域管理。通过使用DrIFT数据集,研究人员能够训练和测试无人机检测模型,使其在实际部署中具有更高的鲁棒性和适应性,从而在监控、搜索救援、农业和基础设施检查等领域发挥重要作用。
衍生相关工作
DrIFT数据集的发布催生了一系列相关研究工作,特别是在无监督域适应和不确定性评估领域。研究人员利用该数据集开发了新的域适应算法,如不确定性感知的无监督域适应方法,这些方法在DrIFT数据集上的表现优于现有的最先进技术。此外,DrIFT还激发了对背景偏移的深入研究,推动了背景相关评估指标的发展。这些研究不仅提升了无人机检测的准确性,还为其他领域的域适应问题提供了新的思路和方法。
以上内容由遇见数据集搜集并总结生成


