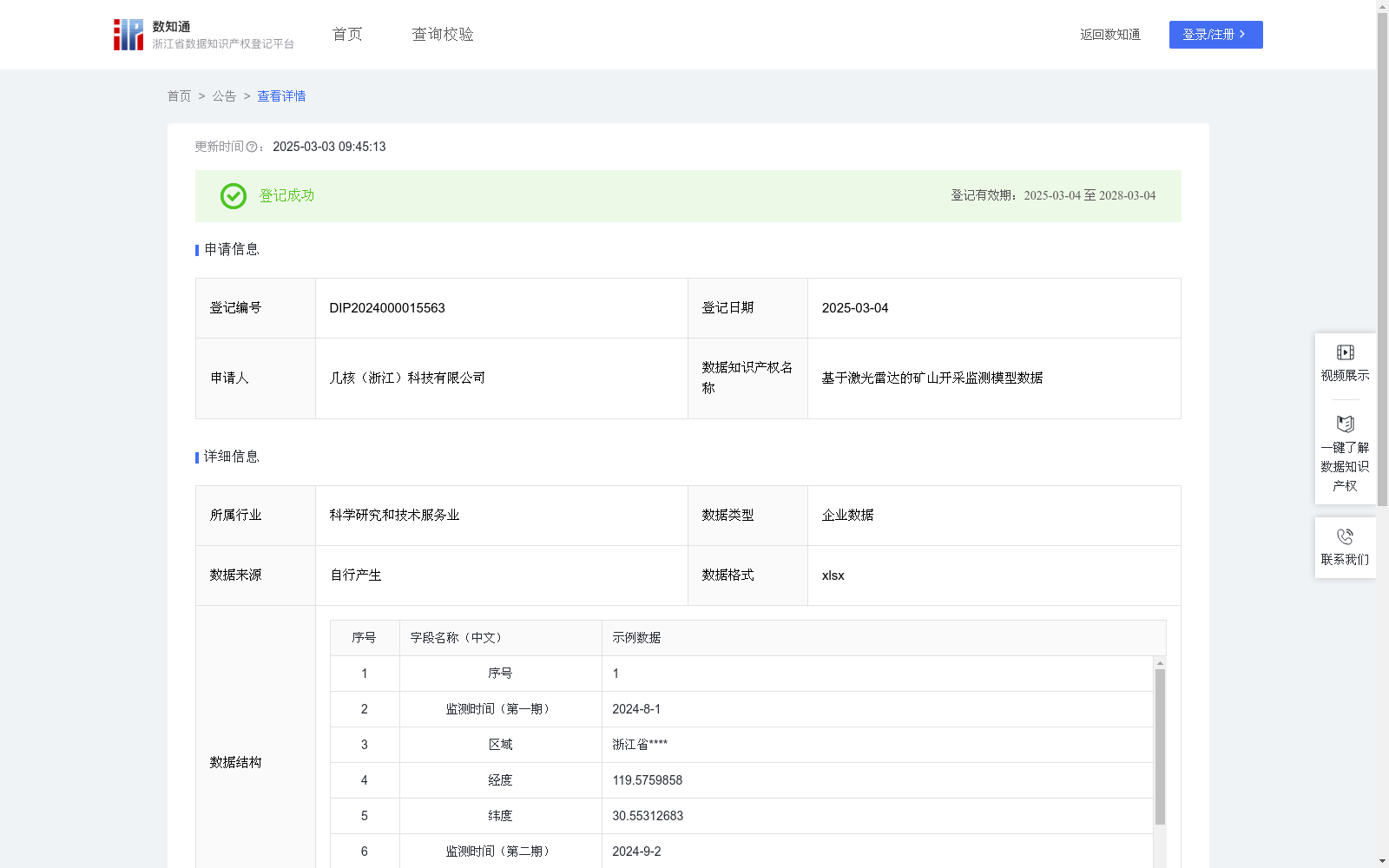
基于激光雷达的矿山开采监测模型数据
收藏浙江省数据知识产权登记平台2025-03-03 更新2025-03-04 收录
下载链接:
https://www.zjip.org.cn/home/announce/trends/115132
下载链接
链接失效反馈官方服务:
资源简介:
矿产资源是人类赖以生存和经济发展的重要物资基础,随着现代测绘技术的进步,矿山测量的数据量越来越多,成果要求越来越多样化。采用激光雷达采集技术,定期获取矿山的精细三维点云数据,通过数据比对后,判断是否存在越界开采行为,实现数字化矿山管理和高效化矿山生态监测。为对资源开采有检测需要的企业,机构提供数据支持。1、激光雷达点云获取:对矿山进行矿区勘探后确定监测范围,根据矿山实际区域大小与高差选取激光雷达系统并制定数据采集方案,完成外业数据采集。2、数据解算:基于惯导数据、激光测距数据、GNSS数据通过相关软件联合解算得到激光雷达点云数据,对应数据字段为经纬度信息。3、点云去噪:对原始激光雷达点云采用稀疏离群点移除法(statistical outlier removal)进行去噪,将离群点并从数据集中去除掉。4、点云配准:对开采前后两期点云数据采用迭代最近点(iterative closest point, icp)自动配准算法,找到两组点云集合中距离最近的点对,最终将待配准的点云与参考点云的数据对进行一一对应,完成两期点云数据配准,确定开挖边界。5、数据比对:对两期的边界进行比对,确定是否存在越界开采情况。生成大数据网络模型。
Mineral resources are a vital material foundation for human survival and economic development. With the advancement of modern surveying and mapping technologies, the volume of mine survey data has been growing continuously, and the requirements for survey results have become increasingly diverse. Adopting LiDAR acquisition technology, fine 3D point cloud data of mines is regularly collected. By comparing the collected data, it can be determined whether there is unauthorized mining behavior, thereby realizing digital mine management and efficient mine ecological monitoring. This dataset provides data support for enterprises and institutions that require resource mining detection.
1. LiDAR Point Cloud Acquisition: Determine the monitoring scope after conducting mine exploration, select a suitable LiDAR system and formulate a data collection scheme based on the actual size and elevation difference of the mine area, and complete the field data collection.
2. Data Solution: Jointly solve to obtain LiDAR point cloud data via relevant software based on inertial navigation data, laser ranging data and GNSS data, with the corresponding data field being latitude and longitude information.
3. Point Cloud Denoising: Apply the statistical outlier removal method to denoise the original LiDAR point cloud, and eliminate outliers from the dataset.
4. Point Cloud Registration: Use the iterative closest point (ICP) automatic registration algorithm for the two phases of point cloud data collected before and after mining. Find the closest point pairs in the two point cloud sets, finally establish one-to-one correspondence between the point cloud to be registered and the reference point cloud, complete the registration of the two-phase point cloud data, and determine the excavation boundary.
5. Data Comparison: Compare the excavation boundaries of the two phases to confirm whether there is unauthorized mining, and generate a big data network model.
提供机构:
几核(浙江)科技有限公司
创建时间:
2024-11-14
搜集汇总
数据集介绍
特点
该数据集是基于激光雷达技术的矿山开采监测数据,包含524条xlsx格式的企业数据,用于通过三维点云比对监测越界开采行为,支持数字化矿山管理和生态监测。
以上内容由遇见数据集搜集并总结生成


