PlaceIt3D
收藏arXiv2025-05-08 更新2025-05-12 收录
下载链接:
https://nianticlabs.github.io/placeit3d/
下载链接
链接失效反馈官方服务:
资源简介:
PlaceIt3D数据集是一个大规模的3D语言模型训练数据集,用于训练语言引导的3D对象放置任务。该数据集使用真实的3D场景和资产,并包含所有有效的放置位置。该数据集由565个不同的ScanNet场景和20个独特的资产组成,包含68,561个空间约束、53,009个旋转约束和26,192个可见性约束。
The PlaceIt3D Dataset is a large-scale training dataset for 3D language models, tailored for language-guided 3D object placement tasks. It employs real 3D scenes and assets, and encompasses all valid placement positions. This dataset comprises 565 distinct ScanNet scenes and 20 unique assets, incorporating 68,561 spatial constraints, 53,009 rotation constraints, and 26,192 visibility constraints.
提供机构:
Niantic Spatial
创建时间:
2025-05-08
原始信息汇总
PlaceIt3D: 语言引导的3D场景物体放置数据集
数据集概述
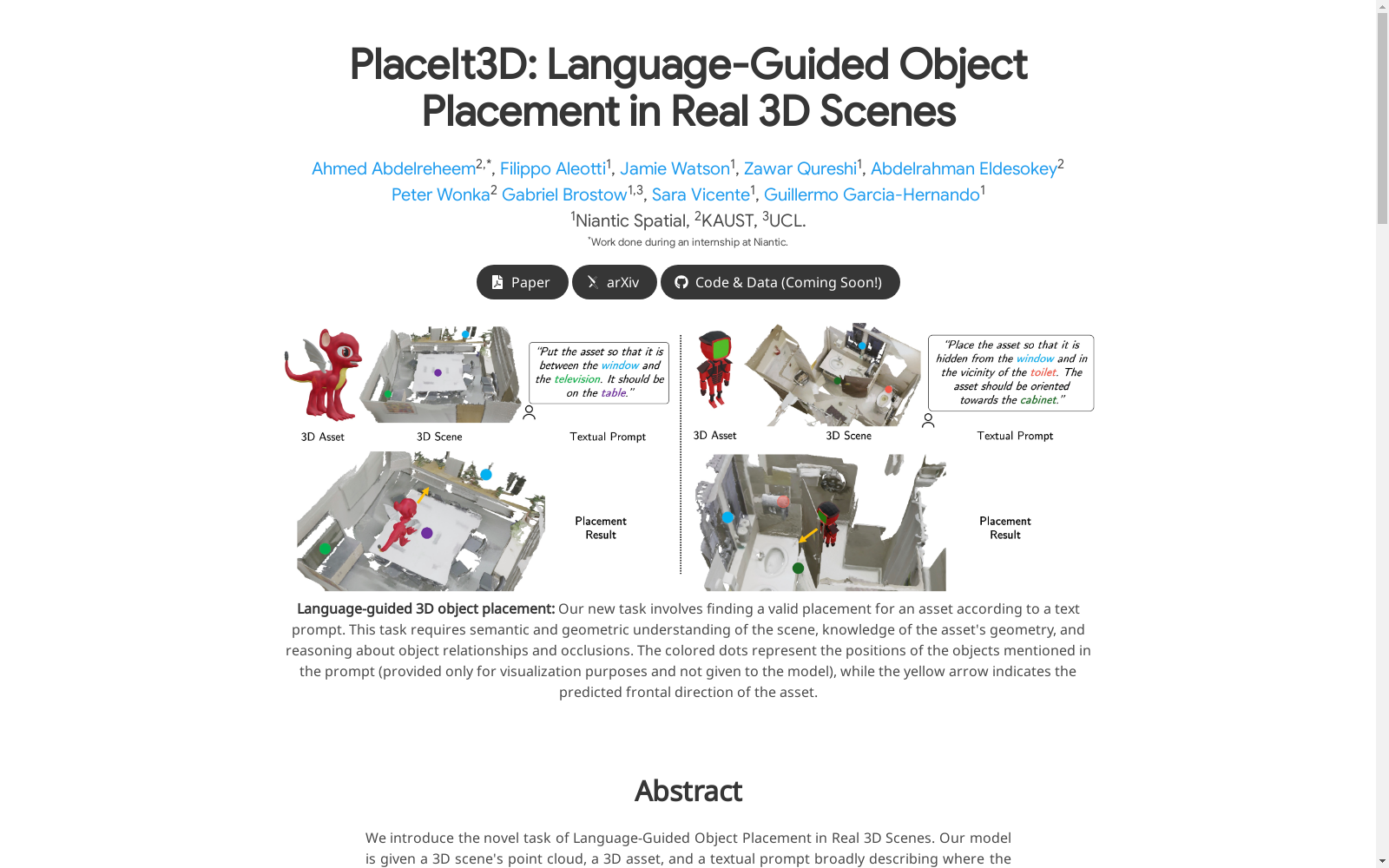
- 任务描述: 语言引导的3D物体放置任务,要求根据文本提示在真实3D场景中找到3D资产的合理放置位置。
- 核心挑战:
- 任务具有多解性(存在多个有效解决方案)
- 需要理解3D几何关系和空闲空间
- 输入数据:
- 3D场景点云
- 3D资产
- 描述放置位置的文本提示
- 输出要求: 生成符合文本提示的有效放置位置
数据集创建方法
- 物理可行性验证: 识别场景中物理上可行的放置点(红色标记)
- 旋转角度考虑: 评估8个等间距旋转角度的放置有效性
- 语言约束生成:
- 基于场景图选择物体锚点
- 结合关系类型创建约束条件和有效性掩码
- 最终输出: 通过交叉验证不同约束条件的有效性掩码生成最终放置方案
技术方法
- 场景特征提取: 使用点编码器提取3D场景特征,加入位置嵌入
- 资产编码: 通过预训练资产编码器和最大池化将资产编码为向量
- 多模态融合:
- Q-Former合并场景特征和可训练查询
- LLM处理场景特征、文本提示和资产特征的投影
- 预测输出:
- 有效放置掩码(Mloc)
- 辅助锚点定位掩码(Manc)
- 旋转角度有效掩码(Mrot)
评估指标
- 定性评估:
- 成功案例: 满足语言指令和指定约束
- 典型问题: 轻微场景网格交叉/部分约束未满足
引用信息
bibtex @article{abdelreheem2025Placeit3d, author = {Abdelreheem, Ahmed and Aleotti, Filippo and Watson, Jamie and Qureshi, Zawar and Eldesokey, Abdelrahman and Wonka, Peter and Brostow, Gabriel and Vicente, Sara and Garcia-Hernando, Guillermo}, title = {PlaceIt3D: Language-Guided Object Placement in Real 3D Scenes}, journal = {arXiv}, year = {2025} }
版权声明
Copyright © Niantic Spatial 2025. Patent Pending. All rights reserved.
搜集汇总
数据集介绍
构建方式
PlaceIt3D数据集通过整合ScanNet场景和PartObjaverse-Tiny资产,结合语言提示构建而成。该数据集采用基于规则的系统和高效近似方法生成有效放置掩码,确保物理合理性和语言约束的满足。具体而言,通过高度图表示和网格渲染技术,验证资产在场景中的物理可行性和可见性,同时利用模板生成多样化的语言提示,覆盖空间、旋转和可见性等多种约束类型。
特点
PlaceIt3D数据集以其大规模和多样性著称,包含97,020个训练样本和3,300个评估样本,涵盖565个独特场景和20种不同资产。该数据集的特点在于其多解性,即每个语言提示对应多个有效放置方案,反映了任务的固有模糊性。此外,数据集提供了详细的约束分类统计,包括空间、旋转和可见性约束,为模型训练和评估提供了丰富的信息。
使用方法
使用PlaceIt3D数据集时,研究人员可以将其用于训练和评估语言引导的3D物体放置模型。数据集提供了场景点云、3D资产和语言提示的三元组,以及对应的有效放置掩码。评估时,通过检查预测放置是否满足各项约束,计算全局约束准确率和完整放置成功率等指标。此外,数据集还可用于研究3D场景理解和空间推理能力,为增强现实和机器人导航等应用提供支持。
背景与挑战
背景概述
PlaceIt3D是由Niantic、KAUST和UCL等机构的研究团队于2025年提出的创新性数据集,专注于语言引导的3D物体放置任务。该数据集基于ScanNet和PartObjaverse-Tiny构建,包含97,020个训练样本和3,300个评估样本,旨在推动3D场景理解与自然语言处理的交叉研究。其核心研究问题在于解决如何根据自然语言指令在复杂3D场景中实现符合语义和几何约束的物体放置,这一突破为增强现实、机器人操作等应用提供了关键技术支撑。
当前挑战
PlaceIt3D面临三大核心挑战:在领域问题层面,语言引导的3D放置具有固有歧义性,单个指令可能对应多个有效解决方案,这对评估指标设计提出了更高要求;在几何理解方面,需要同时处理场景点云与物体网格的3D空间关系,包括遮挡分析、自由空间推理等复杂空间约束;在数据集构建过程中,物理合理性验证涉及大规模碰撞检测计算,而语言约束的自动化标注需要设计精密的规则系统,两者均带来显著的工程复杂度。
常用场景
经典使用场景
PlaceIt3D数据集在计算机视觉领域被广泛应用于语言引导的三维物体放置任务。该数据集通过结合真实三维场景的点云数据、三维资产和自然语言提示,为研究者提供了一个评估模型在复杂三维环境中进行物体定位和方向预测能力的平台。其经典使用场景包括在增强现实(AR)和虚拟现实(VR)应用中,用户通过自然语言指令指导虚拟物体的摆放,例如在室内设计软件中根据语音命令调整家具位置。
实际应用
在实际应用层面,PlaceIt3D为机器人操作和智能家居系统提供了关键技术支撑。在工业机器人领域,工人可以通过自然语言指令精确控制机械臂放置零部件;在智能家居场景中,用户可语音指挥服务机器人'将水杯放在茶几远离边缘的位置'。该数据集还推动了AR导航系统的发展,游客通过'请将路标放置在走廊左侧可见处'等指令,即可在复杂场馆中获得增强现实导航标记。
衍生相关工作
该数据集催生了多个三维视觉与语言交叉领域的重要研究。基于PlaceIt3D的基准测试,研究者开发了PlaceWizard等原型方法,创新性地融合点云编码器与大型语言模型。相关工作扩展至三维场景问答系统ScanQA、物体接地任务ReferIt3D等方向。特别值得注意的是,其空间约束标注方法被后续工作如FirePlace采用,推动了基于常识推理的三维物体合成研究。数据集构建中的高度图技术也为后续三维场景理解任务提供了可扩展的解决方案。
以上内容由遇见数据集搜集并总结生成


