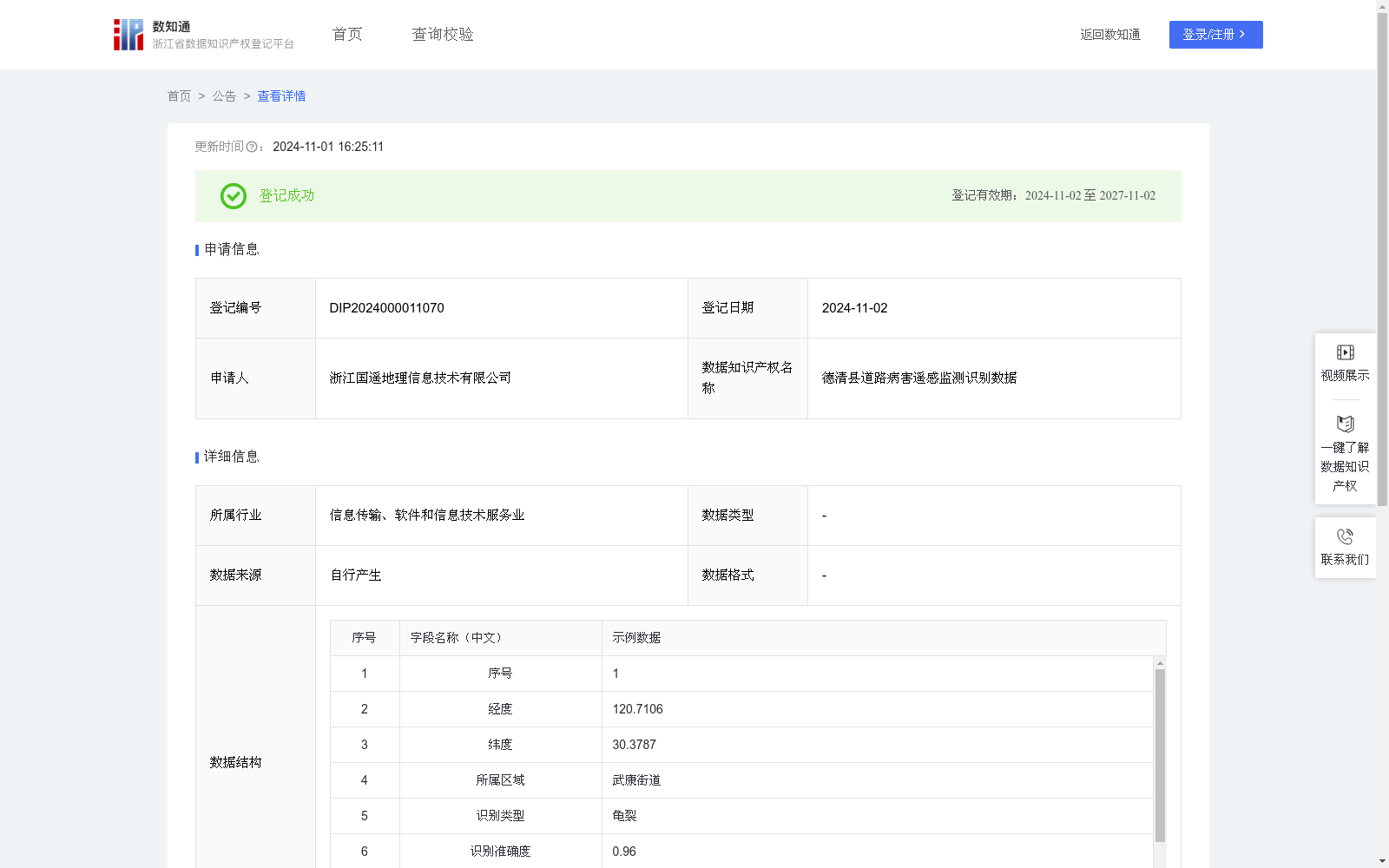
德清县道路病害遥感监测识别数据
收藏浙江省数据知识产权登记平台2024-11-01 更新2024-11-02 收录
下载链接:
https://www.zjip.org.cn/home/announce/trends/80114
下载链接
链接失效反馈官方服务:
资源简介:
用于实现对道路病害监测中问题点位的高效精准识别,包括龟裂、路面污染、标线磨损缺失、路肩积水等现象的识别。能够监测出道路异常,及时发现道路病害区域。自动识别道路病害区域坐标,便于确定需要进行实地处理的位置。自动识别监测内容和变化类型,便于掌握实地情况。为后续的问题派发提供方便,有利于工作人员及时掌握水域异常情况,避免道路出现问题无人管理而引发交通事故。通过遥感监测解决了网格员在传统人工巡查中难以发现问题,容易忽略问题,巡查范围太大,隐蔽地段、偏远地区与恶劣环境中不易巡查等问题。将系统识别出的问题点位派发给网格员,使网格员有依据、有目标的实地确认,极大的提高了发现问题的效率,节约人员时间与人工成本,避免网格员出现无效的巡查。基于无人机航拍采集真实道路遥感影像数据,通过YOLO算法进行实时目标检测。首先将单元神经网络应用于完整的遥感影像,将图像分割成19x19的单元格,每个单元神经网络负责预测K个单元格。预测每个区域的概率,所有单元格上具有最大概率的类被选择并分配给特定的网格单元,生成由预测概率加权的边界框。
在预测类概率后,进行NMS运算,算法识别下一个最高类别概率的边界框,并进行相同的运算过程,直到剩下所有不同的边界框。算法输出所需的向量,并显示各个类的边界框的细节。
通过判断结果正确或错误来纳入或排除数据,识别道路病害区域,自动获取问题点位坐标,匹配到相应的管理区域与管理人员,并将影像中的特征区域与坐标等信息自动上传至德清林地变化遥感监测平台,最终获得德清道路病害遥感监测识别数据。
This dataset is developed for efficient and accurate identification of problem points in road distress monitoring, covering the detection of phenomena such as cracking, pavement contamination, marking wear and missing, and shoulder ponding. It enables real-time monitoring of road abnormalities and timely detection of road distress areas. It automatically identifies the coordinates of road distress regions, facilitating the confirmation of locations requiring on-site handling. Additionally, it automatically recognizes monitoring contents and change types to help grasp on-site conditions. It supports convenient subsequent issue dispatching, enabling staff to timely grasp abnormal road conditions and avoid traffic accidents caused by unmanaged road issues.
This dataset solves the problems faced by grid inspectors in traditional manual patrols, including difficulty in detecting issues, tendency to overlook problems, overly large patrol scope, and challenges in patrolling concealed, remote areas and harsh environments, through remote sensing monitoring. Dispatching the problem points identified by the system to grid inspectors enables them to conduct on-site verification with clear basis and targets, greatly improving the efficiency of problem detection, saving labor time and labor costs, and avoiding ineffective patrols by grid inspectors.
The dataset collects real road remote sensing image data via UAV aerial photography, and performs real-time object detection using the YOLO algorithm. First, the grid-based neural network is applied to the complete remote sensing image, dividing the image into 19×19 grid cells. Each grid cell is responsible for predicting K bounding boxes. The model predicts the probability of each region, selects the class with the highest probability across all grid cells and assigns it to the corresponding grid cell, generating bounding boxes weighted by the predicted probabilities.
After predicting the class probabilities, Non-Maximum Suppression (NMS) is executed. The algorithm identifies the bounding box with the next highest class probability and repeats the same process until all distinct bounding boxes remain. The algorithm outputs the required vectors and displays the detailed information of the bounding boxes for each class.
Data is included or excluded by verifying whether the recognition results are correct or incorrect. The system identifies road distress areas, automatically acquires the coordinates of problem points, matches them to corresponding management areas and responsible personnel, and automatically uploads information such as feature regions and coordinates in the images to the Deqing Forest Land Change Remote Sensing Monitoring Platform, ultimately generating Deqing road distress remote sensing monitoring and recognition data.
提供机构:
浙江国遥地理信息技术有限公司
创建时间:
2024-10-11
搜集汇总
数据集介绍
以上内容由遇见数据集搜集并总结生成


