RoboMIND2.0
收藏魔搭社区2026-05-16 更新2026-01-10 收录
下载链接:
https://modelscope.cn/datasets/X-Humanoid/RoboMIND2.0
下载链接
链接失效反馈官方服务:
资源简介:

# 🎉🎉 RoboMIND2.0 🎉🎉
[中文](https://modelscope.cn/datasets/X-Humanoid/RoboMIND2.0/file/view/master/README.zh.md?id=169304&status=1) | [English](https://modelscope.cn/datasets/X-Humanoid/RoboMIND2.0/file/view/master/README.md?id=169304&status=1)
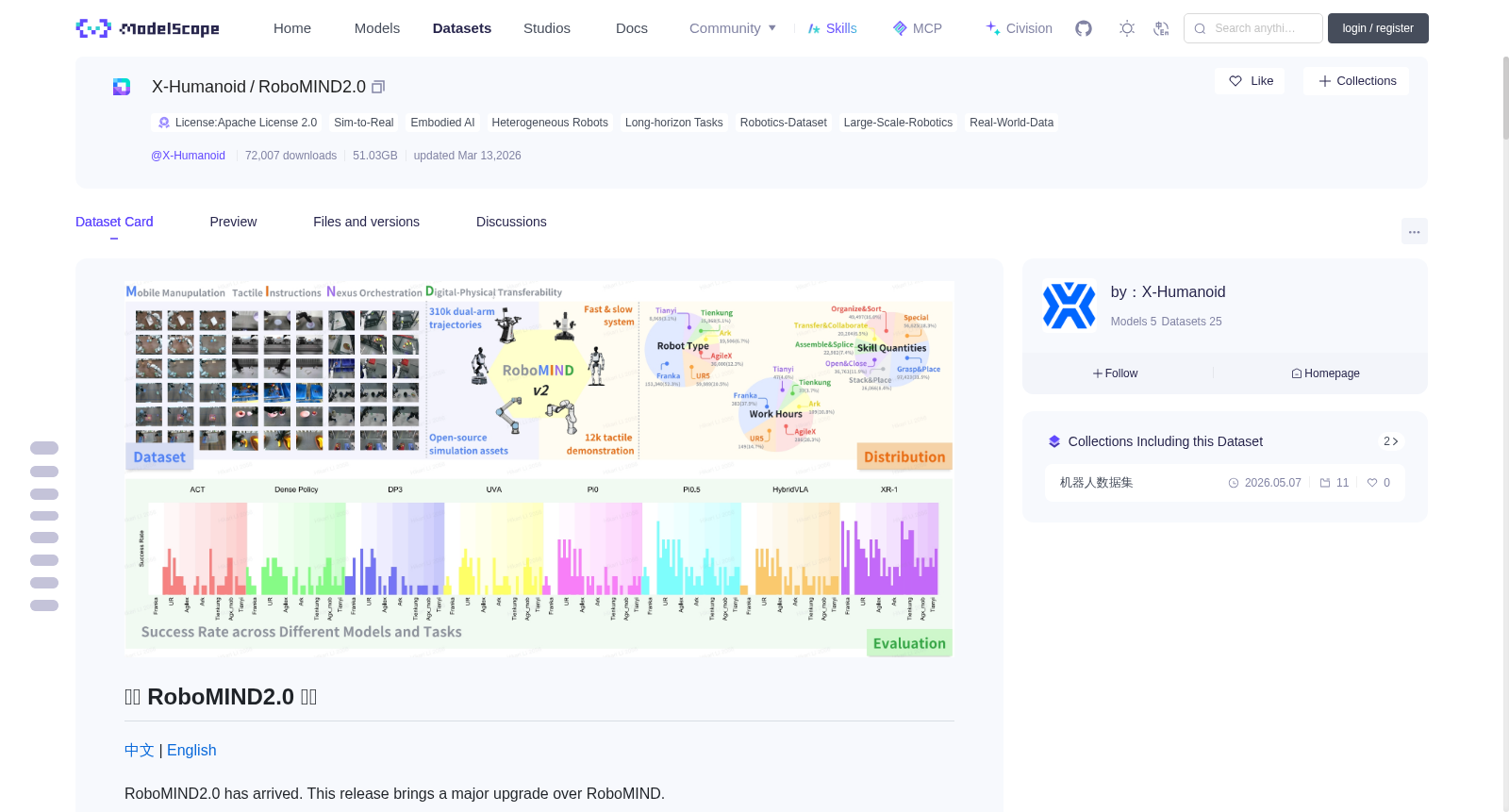
RoboMIND2.0 has arrived. This release brings a major upgrade over RoboMIND.
We focus on complex data from **dual-arm manipulation** and **mobile manipulation** scenarios, which are highly demanded by the community. RoboMIND2.0 introduces many practical features to further advance robot learning and embodied intelligence research.
Wanna review RoboMIND1.0? Please check modelscope repo [RoboMIND MS](https://modelscope.cn/datasets/X-Humanoid/RoboMIND) or Huggingface repo [RoboMIND HF](https://huggingface.co/datasets/x-humanoid-robomind/RoboMIND).
## Key Upgrades
- RoboMIND2.0 scales up to **310K trajectories**, totaling over **1,000 hours** of data.
- RoboMIND2.0 includes **12K tactile-enriched sequences**.
- RoboMIND2.0 collects **20K mobile manipulation trajectories**.
- RoboMIND2.0 covers **6 popular robotic embodiments**.
## Embodiments Involved 🤖
<table>
<tr>
<td align="center"><img src="assets/tienkung.jpg" width="200" alt="Tienkung"></td>
<td align="center"><img src="assets/tienyi.jpg" width="200" alt="Tianyi"></td>
<td align="center"><img src="assets/agilex.jpg" width="200" alt="AgileX"></td>
</tr>
<tr>
<td align="center"><strong>Tienkung</strong></td>
<td align="center"><strong>Tianyi</strong></td>
<td align="center"><strong>AgileX</strong></td>
</tr>
<tr>
<td align="center"><img src="assets/franka.jpg" width="200" alt="Franka"></td>
<td align="center"><img src="assets/ur.jpg" width="200" alt="UR"></td>
<td align="center"><img src="assets/ark.jpg" width="200" alt="Ark"></td>
</tr>
<tr>
<td align="center"><strong>Franka</strong></td>
<td align="center"><strong>UR</strong></td>
<td align="center"><strong>Ark</strong></td>
</tr>
</table>
### Sub-repository Links
- **Tienkung**
- [X-Humanoid/RoboMIND2.0-Tienkung](https://modelscope.cn/datasets/X-Humanoid/RoboMIND2.0-Tienkung)
- **Tianyi**
- [X-Humanoid/RoboMIND2.0-Tianyi](https://modelscope.cn/datasets/X-Humanoid/RoboMIND2.0-Tianyi)
- **Tianyi (Mobile)**
- [X-Humanoid/RoboMIND2.0-Tianyi-mobile](https://modelscope.cn/datasets/X-Humanoid/RoboMIND2.0-Tianyi-mobile)
- **AgileX**
- [X-Humanoid/RoboMIND2.0-Agilex](https://modelscope.cn/datasets/X-Humanoid/RoboMIND2.0-Agilex)
- **AgileX (Mobile)**
- [X-Humanoid/RoboMIND2.0-Agilex-mobile](https://modelscope.cn/datasets/X-Humanoid/RoboMIND2.0-Agilex-mobile)
- **Franka**
- [X-Humanoid/RoboMIND2.0-Franka-Part-1](https://modelscope.cn/datasets/X-Humanoid/RoboMIND2.0-Franka-Part-1)
- [X-Humanoid/RoboMIND2.0-Franka-Part-2](https://modelscope.cn/datasets/X-Humanoid/RoboMIND2.0-Franka-Part-2)
- [X-Humanoid/RoboMIND2.0-Franka-Part-3](https://modelscope.cn/datasets/X-Humanoid/RoboMIND2.0-Franka-Part-3)
- [X-Humanoid/RoboMIND2.0-Franka-Part-4](https://modelscope.cn/datasets/X-Humanoid/RoboMIND2.0-Franka-Part-4)
- [X-Humanoid/RoboMIND2.0-Franka-Part-5](https://modelscope.cn/datasets/X-Humanoid/RoboMIND2.0-Franka-Part-5)
- **UR**
- [X-Humanoid/RoboMIND2.0-UR5](https://modelscope.cn/datasets/X-Humanoid/RoboMIND2.0-UR5)
- **UR + DexHand**
- [X-Humanoid/RoboMIND2.0-UR5-Dex](https://modelscope.cn/datasets/X-Humanoid/RoboMIND2.0-UR5-Dex)
- **Ark**
- [X-Humanoid/RoboMIND2.0-Ark](https://modelscope.cn/datasets/X-Humanoid/RoboMIND2.0-Ark)
- **Ark (Mobile)**
- [X-Humanoid/RoboMIND2.0-Ark-mobile](https://modelscope.cn/datasets/X-Humanoid/RoboMIND2.0-Ark-mobile)
- **Simulation**
- [X-Humanoid/RoboMIND2.0-Tienkung-sim](https://modelscope.cn/datasets/X-Humanoid/RoboMIND2.0-Tienkung-sim)
- [X-Humanoid/RoboMIND2.0-Franka-sim](https://modelscope.cn/datasets/X-Humanoid/RoboMIND2.0-Franka-sim)
## Overall HDF5 Data Structure
Below is the unified HDF5 format used in RoboMIND2.0. Each dataset variant contains a subset of the following structure.
```
/
├── metadata
│ ├── language_instruction
│ ├── data_type
│ ├── data_format_version
│ ├── collection_time
│ ├── collector
│ ├── sim_assets
│ └── trajectory_length
│
├── camera_model
│ ├── camera_top
│ ├── camera_front
│ ├── camera_left
│ ├── camera_right
│ ├── camera_head
│ ├── camera_wrist_left
│ └── camera_wrist_right
│
├── camera_color_resolution
│ ├── camera_top
│ ├── camera_front
│ ├── camera_left
│ ├── camera_right
│ ├── camera_head
│ ├── camera_wrist_left
│ └── camera_wrist_right
│
├── camera_color_channel
│ ├── camera_top
│ ├── camera_front
│ ├── camera_left
│ ├── camera_right
│ ├── camera_head
│ ├── camera_wrist_left
│ └── camera_wrist_right
│
├── camera_depth_resolution
│ ├── camera_top
│ ├── camera_front
│ ├── camera_left
│ ├── camera_right
│ ├── camera_head
│ ├── camera_wrist_left
│ └── camera_wrist_right
│
├── camera_intrinsics
│ ├── camera_top
│ │ ├── matrix
│ │ └── dist_coeffs
│ ├── camera_front
│ │ ├── matrix
│ │ └── dist_coeffs
│ ├── camera_left
│ │ ├── matrix
│ │ └── dist_coeffs
│ ├── camera_right
│ │ ├── matrix
│ │ └── dist_coeffs
│ ├── camera_head
│ │ ├── matrix
│ │ └── dist_coeffs
│ ├── camera_wrist_left
│ │ ├── matrix
│ │ └── dist_coeffs
│ └── camera_wrist_right
│ ├── matrix
│ └── dist_coeffs
│
├── camera_extrinsics
│ ├── camera_top
│ ├── camera_front
│ ├── camera_left
│ ├── camera_right
│ ├── camera_head
│ ├── camera_wrist_left
│ └── camera_wrist_right
│
├── base_to_robot_transformation
│ ├── base_to_robot_left
│ ├── base_to_robot_right
│ └── base_to_robot_single
│
├── force_model
│ ├── force_left_end_effector
│ ├── force_right_end_effector
│ ├── force_left_arm_joints
│ └── force_right_arm_joints
│
├── tactile_model
│ ├── tactile_left
│ └── tactile_right
│
├── master
│ ├── arm_left_position_raw
│ │ ├── timestamp
│ │ ├── is_intervene
│ │ └── data
│ ├── arm_left_position_align
│ ├── arm_right_position_raw
│ ├── arm_right_position_align
│ ├── arm_single_position_raw
│ ├── arm_single_position_align
│ ├── end_effector_left_position_raw
│ ├── end_effector_left_position_align
│ ├── end_effector_right_position_raw
│ ├── end_effector_right_position_align
│ ├── end_effector_single_position_raw
│ ├── end_effector_single_position_align
│ ├── end_effector_left_pose_raw
│ ├── end_effector_left_pose_align
│ ├── end_effector_right_pose_raw
│ ├── end_effector_right_pose_align
│ ├── end_effector_single_pose_raw
│ ├── end_effector_single_pose_align
│ ├── head_position_raw
│ ├── head_position_align
│ ├── waist_position_raw
│ ├── waist_position_align
│ ├── leg_left_position_raw
│ ├── leg_left_position_align
│ ├── leg_right_position_raw
│ ├── leg_right_position_align
│ ├── chassis_pose_raw
│ ├── chassis_pose_align
│ ├── chassis_twist_raw
│ └── chassis_twist_align
│
├── puppet
│ └── (same structure as master)
│
├── camera_observations
│ ├── timestamp
│ ├── is_intervene
│ ├── color_images
│ │ ├── camera_top
│ │ ├── camera_front
│ │ ├── camera_left
│ │ ├── camera_right
│ │ ├── camera_head
│ │ ├── camera_wrist_left
│ │ └── camera_wrist_right
│ └── depth_images
│ ├── camera_top
│ ├── camera_front
│ ├── camera_left
│ ├── camera_right
│ ├── camera_head
│ ├── camera_wrist_left
│ └── camera_wrist_right
│
├── force_observations
│ ├── force_left_end_effector_raw
│ ├── force_left_end_effector_align
│ ├── force_right_end_effector_raw
│ ├── force_right_end_effector_align
│ ├── force_left_arm_joints_raw
│ ├── force_left_arm_joints_align
│ ├── force_right_arm_joints_raw
│ └── force_right_arm_joints_align
│
└── tactile_observations
├── tactile_left_raw
├── tactile_left_align
├── tactile_right_raw
└── tactile_right_align
```
## RoboMIND-Sim
Additionally, we have open-sourced a simulation environment built on Isaac Sim, which includes training datasets and standardized evaluation scripts. Researchers can leverage these resources out-of-the-box to rapidly conduct model performance evaluation and algorithm validation within the simulation.
[RoboMIND-Sim](https://github.com/Open-X-Humanoid/RoboMIND-Sim)
## Discussion:
<td align="left"><img src="assets/wechat.jpg" width="400" alt="Tienkung"></td>
## Citation
If you find this project helpful, please cite:
```
@misc{hou2025robomind20multimodalbimanual,
title={RoboMIND 2.0: A Multimodal, Bimanual Mobile Manipulation Dataset for Generalizable Embodied Intelligence},
author={Chengkai Hou and Kun Wu and Jiaming Liu and Zhengping Che and Di Wu and Fei Liao and Guangrun Li and Jingyang He and Qiuxuan Feng and Zhao Jin and Chenyang Gu and Zhuoyang Liu and Nuowei Han and Xiangju Mi and Yaoxu Lv and Yankai Fu and Gaole Dai and Langzhe Gu and Tao Li and Yuheng Zhang and Yixue Zhang and Xinhua Wang and Shichao Fan and Meng Li and Zhen Zhao and Ning Liu and Zhiyuan Xu and Pei Ren and Junjie Ji and Haonan Liu and Kuan Cheng and Shanghang Zhang and Jian Tang},
year={2025},
eprint={2512.24653},
archivePrefix={arXiv},
url={https://arxiv.org/abs/2512.24653},
}
```

# 🎉🎉 RoboMIND2.0 🎉🎉
[中文文档](https://modelscope.cn/datasets/X-Humanoid/RoboMIND2.0/file/view/master/README.zh.md?id=169304&status=1) | [英文文档](https://modelscope.cn/datasets/X-Humanoid/RoboMIND2.0/file/view/master/README.md?id=169304&status=1)
RoboMIND2.0正式发布。本版本相较于初代RoboMIND实现了重大升级。
我们聚焦于当前学术社区需求旺盛的**双臂操作(dual-arm manipulation)**与**移动操作(mobile manipulation)**复杂场景数据。RoboMIND2.0新增多项实用特性,以进一步推动机器人学习与具身智能(Embodied Intelligence)领域的研究发展。
如需回顾RoboMIND 1.0,请访问ModelScope仓库[RoboMIND MS](https://modelscope.cn/datasets/X-Humanoid/RoboMIND)或Hugging Face仓库[RoboMIND HF](https://huggingface.co/datasets/x-humanoid-robomind/RoboMIND)。
## 核心升级点
- 数据集规模扩展至**31万条轨迹**,总时长超过**1000小时**。
- 包含**1.2万条带丰富触觉信息的序列**。
- 收录**2万条移动操作轨迹**。
- 覆盖**6款主流机器人平台**。
## 涉及的机器人平台 🤖
<table>
<tr>
<td align="center"><img src="assets/tienkung.jpg" width="200" alt="Tienkung"></td>
<td align="center"><img src="assets/tienyi.jpg" width="200" alt="Tianyi"></td>
<td align="center"><img src="assets/agilex.jpg" width="200" alt="AgileX"></td>
</tr>
<tr>
<td align="center"><strong>Tienkung</strong></td>
<td align="center"><strong>Tianyi</strong></td>
<td align="center"><strong>AgileX</strong></td>
</tr>
<tr>
<td align="center"><img src="assets/franka.jpg" width="200" alt="Franka"></td>
<td align="center"><img src="assets/ur.jpg" width="200" alt="UR"></td>
<td align="center"><img src="assets/ark.jpg" width="200" alt="Ark"></td>
</tr>
<tr>
<td align="center"><strong>Franka</strong></td>
<td align="center"><strong>UR</strong></td>
<td align="center"><strong>Ark</strong></td>
</tr>
</table>
### 子仓库链接
- **Tienkung**
- [X-Humanoid/RoboMIND2.0-Tienkung](https://modelscope.cn/datasets/X-Humanoid/RoboMIND2.0-Tienkung)
- **Tianyi**
- [X-Humanoid/RoboMIND2.0-Tianyi](https://modelscope.cn/datasets/X-Humanoid/RoboMIND2.0-Tianyi)
- **Tianyi (移动版)**
- [X-Humanoid/RoboMIND2.0-Tianyi-mobile](https://modelscope.cn/datasets/X-Humanoid/RoboMIND2.0-Tianyi-mobile)
- **AgileX**
- [X-Humanoid/RoboMIND2.0-Agilex](https://modelscope.cn/datasets/X-Humanoid/RoboMIND2.0-Agilex)
- **AgileX (移动版)**
- [X-Humanoid/RoboMIND2.0-Agilex-mobile](https://modelscope.cn/datasets/X-Humanoid/RoboMIND2.0-Agilex-mobile)
- **Franka**
- [X-Humanoid/RoboMIND2.0-Franka-Part-1](https://modelscope.cn/datasets/X-Humanoid/RoboMIND2.0-Franka-Part-1)
- [X-Humanoid/RoboMIND2.0-Franka-Part-2](https://modelscope.cn/datasets/X-Humanoid/RoboMIND2.0-Franka-Part-2)
- [X-Humanoid/RoboMIND2.0-Franka-Part-3](https://modelscope.cn/datasets/X-Humanoid/RoboMIND2.0-Franka-Part-3)
- [X-Humanoid/RoboMIND2.0-Franka-Part-4](https://modelscope.cn/datasets/X-Humanoid/RoboMIND2.0-Franka-Part-4)
- [X-Humanoid/RoboMIND2.0-Franka-Part-5](https://modelscope.cn/datasets/X-Humanoid/RoboMIND2.0-Franka-Part-5)
- **UR**
- [X-Humanoid/RoboMIND2.0-UR5](https://modelscope.cn/datasets/X-Humanoid/RoboMIND2.0-UR5)
- **UR + 灵巧手**
- [X-Humanoid/RoboMIND2.0-UR5-Dex](https://modelscope.cn/datasets/X-Humanoid/RoboMIND2.0-UR5-Dex)
- **Ark**
- [X-Humanoid/RoboMIND2.0-Ark](https://modelscope.cn/datasets/X-Humanoid/RoboMIND2.0-Ark)
- **Ark (移动版)**
- [X-Humanoid/RoboMIND2.0-Ark-mobile](https://modelscope.cn/datasets/X-Humanoid/RoboMIND2.0-Ark-mobile)
- **仿真环境**
- [X-Humanoid/RoboMIND2.0-Tienkung-sim](https://modelscope.cn/datasets/X-Humanoid/RoboMIND2.0-Tienkung-sim)
- [X-Humanoid/RoboMIND2.0-Franka-sim](https://modelscope.cn/datasets/X-Humanoid/RoboMIND2.0-Franka-sim)
## 统一HDF5数据结构
以下为RoboMIND2.0采用的统一HDF5格式。各数据集变体均包含下述结构的子集。
/
├── metadata
│ ├── language_instruction
│ ├── data_type
│ ├── data_format_version
│ ├── collection_time
│ ├── collector
│ ├── sim_assets
│ └── trajectory_length
│
├── camera_model
│ ├── camera_top
│ ├── camera_front
│ ├── camera_left
│ ├── camera_right
│ ├── camera_head
│ ├── camera_wrist_left
│ └── camera_wrist_right
│
├── camera_color_resolution
│ ├── camera_top
│ ├── camera_front
│ ├── camera_left
│ ├── camera_right
│ ├── camera_head
│ ├── camera_wrist_left
│ └── camera_wrist_right
│
├── camera_color_channel
│ ├── camera_top
│ ├── camera_front
│ ├── camera_left
│ ├── camera_right
│ ├── camera_head
│ ├── camera_wrist_left
│ └── camera_wrist_right
│
├── camera_depth_resolution
│ ├── camera_top
│ ├── camera_front
│ ├── camera_left
│ ├── camera_right
│ ├── camera_head
│ ├── camera_wrist_left
│ └── camera_wrist_right
│
├── camera_intrinsics
│ ├── camera_top
│ │ ├── matrix
│ │ └── dist_coeffs
│ ├── camera_front
│ │ ├── matrix
│ │ └── dist_coeffs
│ ├── camera_left
│ │ ├── matrix
│ │ └── dist_coeffs
│ ├── camera_right
│ │ ├── matrix
│ │ └── dist_coeffs
│ ├── camera_head
│ │ ├── matrix
│ │ └── dist_coeffs
│ ├── camera_wrist_left
│ │ ├── matrix
│ │ └── dist_coeffs
│ └── camera_wrist_right
│ ├── matrix
│ └── dist_coeffs
│
├── camera_extrinsics
│ ├── camera_top
│ ├── camera_front
│ ├── camera_left
│ ├── camera_right
│ ├── camera_head
│ ├── camera_wrist_left
│ └── camera_wrist_right
│
├── base_to_robot_transformation
│ ├── base_to_robot_left
│ ├── base_to_robot_right
│ └── base_to_robot_single
│
├── force_model
│ ├── force_left_end_effector
│ ├── force_right_end_effector
│ ├── force_left_arm_joints
│ └── force_right_arm_joints
│
├── tactile_model
│ ├── tactile_left
│ └── tactile_right
│
├── master
│ ├── arm_left_position_raw
│ │ ├── timestamp
│ │ ├── is_intervene
│ │ └── data
│ ├── arm_left_position_align
│ ├── arm_right_position_raw
│ ├── arm_right_position_align
│ ├── arm_single_position_raw
│ ├── arm_single_position_align
│ ├── end_effector_left_position_raw
│ ├── end_effector_left_position_align
│ ├── end_effector_right_position_raw
│ ├── end_effector_right_position_align
│ ├── end_effector_single_position_raw
│ ├── end_effector_single_position_align
│ ├── end_effector_left_pose_raw
│ ├── end_effector_left_pose_align
│ ├── end_effector_right_pose_raw
│ ├── end_effector_right_pose_align
│ ├── end_effector_single_pose_raw
│ ├── end_effector_single_pose_align
│ ├── head_position_raw
│ ├── head_position_align
│ ├── waist_position_raw
│ ├── waist_position_align
│ ├── leg_left_position_raw
│ ├── leg_left_position_align
│ ├── leg_right_position_raw
│ ├── leg_right_position_align
│ ├── chassis_pose_raw
│ ├── chassis_pose_align
│ ├── chassis_twist_raw
│ └── chassis_twist_align
│
├── puppet
│ └── (same structure as master)
│
├── camera_observations
│ ├── timestamp
│ ├── is_intervene
│ ├── color_images
│ │ ├── camera_top
│ │ ├── camera_front
│ │ ├── camera_left
│ │ ├── camera_right
│ │ ├── camera_head
│ │ ├── camera_wrist_left
│ │ └── camera_wrist_right
│ └── depth_images
│ ├── camera_top
│ ├── camera_front
│ ├── camera_left
│ ├── camera_right
│ ├── camera_head
│ ├── camera_wrist_left
│ └── camera_wrist_right
│
├── force_observations
│ ├── force_left_end_effector_raw
│ ├── force_left_end_effector_align
│ ├── force_right_end_effector_raw
│ ├── force_right_end_effector_align
│ ├── force_left_arm_joints_raw
│ ├── force_left_arm_joints_align
│ ├── force_right_arm_joints_raw
│ └── force_right_arm_joints_align
│
└── tactile_observations
├── tactile_left_raw
├── tactile_left_align
├── tactile_right_raw
└── tactile_right_align
## RoboMIND仿真环境
此外,我们开源了基于Isaac Sim构建的仿真环境,包含训练数据集与标准化评估脚本。研究人员可直接利用这些资源,快速开展仿真环境中的模型性能评估与算法验证工作。
[RoboMIND-Sim](https://github.com/Open-X-Humanoid/RoboMIND-Sim)
## 交流讨论:
<td align="left"><img src="assets/wechat.jpg" width="400" alt="微信二维码"></td>
## 引用
如果您认为本项目对您的研究有所帮助,请引用如下文献:
@misc{hou2025robomind20multimodalbimanual,
title={RoboMIND 2.0: A Multimodal, Bimanual Mobile Manipulation Dataset for Generalizable Embodied Intelligence},
author={Chengkai Hou and Kun Wu and Jiaming Liu and Zhengping Che and Di Wu and Fei Liao and Guangrun Li and Jingyang He and Qiuxuan Feng and Zhao Jin and Chenyang Gu and Zhuoyang Liu and Nuowei Han and Xiangju Mi and Yaoxu Lv and Yankai Fu and Gaole Dai and Langzhe Gu and Tao Li and Yuheng Zhang and Yixue Zhang and Xinhua Wang and Shichao Fan and Meng Li and Zhen Zhao and Ning Liu and Zhiyuan Xu and Pei Ren and Junjie Ji and Haonan Liu and Kuan Cheng and Shanghang Zhang and Jian Tang},
year={2025},
eprint={2512.24653},
archivePrefix={arXiv},
url={https://arxiv.org/abs/2512.24653},
}
提供机构:
maas
创建时间:
2026-01-04
搜集汇总
数据集介绍
背景与挑战
背景概述
RoboMIND2.0是一个大规模机器人操作数据集,专注于双臂操作和移动操作场景,包含310K轨迹、12K触觉增强序列和20K移动操作轨迹,覆盖6种流行的机器人实体。数据集采用统一的HDF5格式存储,包含丰富的传感器数据和元数据,适用于机器人学习和具身智能研究。
以上内容由遇见数据集搜集并总结生成


