6-DOF GraspNet
收藏research.nvidia.com2019-08-17 更新2025-02-19 收录
下载链接:
https://research.nvidia.com/publication/2019-10_6-dof-graspnet-variational-grasp-generation-object-manipulation
下载链接
链接失效反馈官方服务:
资源简介:
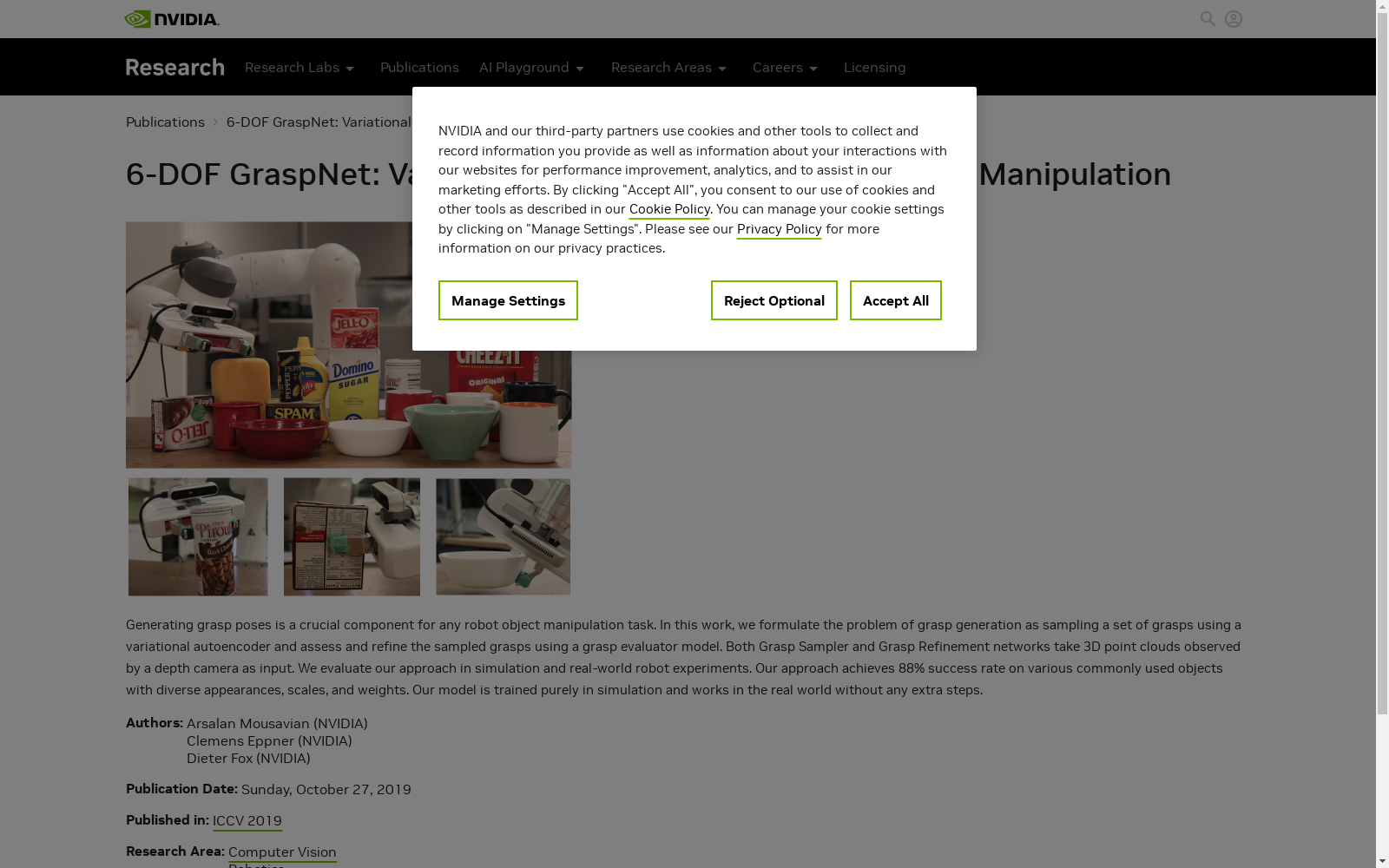
6-DOF GraspNet 是由 NVIDIA 团队创建的用于机器人抓取任务的数据集,旨在通过变分自编码器和抓取评估模型生成多样化的稳定抓取姿势。该数据集包含超过 200 万条成功抓取的标注数据,涵盖 206 种不同形状的物体,如碗、瓶子和杯子等。数据来源于物理仿真平台 FleX,通过随机采样物体表面点并模拟抓取过程生成。其创建过程涉及对抓取姿势的多样化采样与评估,以确保生成的抓取姿势在真实场景中具有高成功率。该数据集主要应用于机器人抓取任务,尤其是针对未知物体的多样化抓取姿势生成与优化,能够有效提升机器人在复杂环境中的抓取成功率。
6-DOF GraspNet is a dataset for robotic grasping tasks created by the NVIDIA team, which aims to generate diverse and stable grasp poses via variational autoencoders and grasp assessment models. This dataset contains over 2 million annotated successful grasping instances, covering 206 objects with distinct shapes such as bowls, bottles, cups and other similar items. The data is sourced from the physics simulation platform FleX, and generated by randomly sampling surface points of objects and simulating the grasping process. Its creation process involves diversified sampling and evaluation of grasp poses to ensure that the generated grasp poses have high success rates in real-world scenarios. This dataset is primarily applied to robotic grasping tasks, especially for the generation and optimization of diverse grasp poses for unknown objects, and can effectively improve the grasping success rate of robots in complex environments.
提供机构:
NVIDIA
创建时间:
2019-08-17
搜集汇总
数据集介绍
背景与挑战
背景概述
该内容描述的是'6-DOF GraspNet'研究项目,而非一个数据集。它提出了一种基于变分自编码器和评估器模型的机器人抓取生成方法,使用3D点云作为输入,在仿真中训练并直接应用于真实世界,在多种物体上实现88%的成功率。页面未提供数据集的具体信息,如数据样本、结构或访问方式。
以上内容由遇见数据集搜集并总结生成


