T-LESS
收藏arXiv2017-01-20 更新2024-07-25 收录
下载链接:
http://cmp.felk.cvut.cz/t-less/
下载链接
链接失效反馈官方服务:
资源简介:
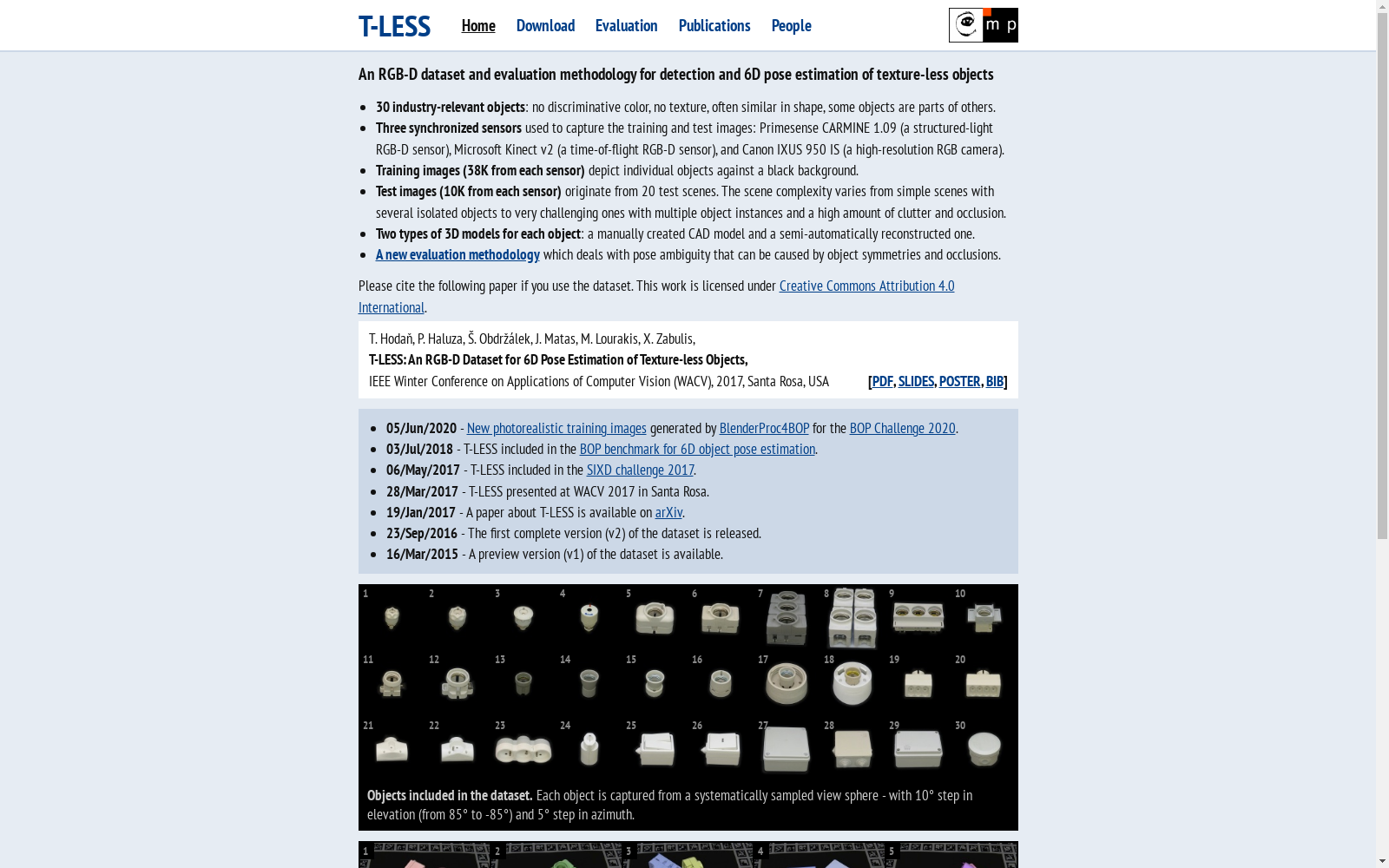
T-LESS数据集是由捷克技术大学机器感知中心创建的,专注于无纹理刚性物体的6D姿态估计。该数据集包含30个工业相关对象,这些对象没有显著的纹理和颜色或反射特性,且在形状和/或大小上表现出对称性和相互相似性。数据集包括约39,000个训练图像和10,000个测试图像,这些图像由三个同步传感器捕获,包括结构光和飞行时间RGB-D传感器以及高分辨率RGB相机。每个对象提供两种类型的3D模型:手动创建的CAD模型和半自动重建的模型。训练图像显示单个对象与黑色背景,而测试图像来自20个具有不同复杂度的测试场景,从简单的场景到具有多个对象实例和大量杂乱和遮挡的非常具有挑战性的场景。T-LESS数据集旨在评估6D对象姿态估计问题的各种变体,以及其他相关问题,如2D对象检测和对象分割。
The T-LESS dataset was created by the Center for Machine Perception at the Czech Technical University, focusing on 6D pose estimation of texture-less rigid objects. It contains 30 industrial-related objects that have no prominent texture, color or reflection properties, and exhibit symmetry and mutual similarity in shape and/or size. The dataset includes approximately 39,000 training images and 10,000 test images captured by three synchronized sensors: structured light and time-of-flight RGB-D sensors, as well as a high-resolution RGB camera. Two types of 3D models are provided for each object: manually created CAD models and semi-automatically reconstructed models. Training images show single objects against a black background, while test images are sourced from 20 test scenes with varying complexity, ranging from simple scenarios to highly challenging ones with multiple object instances, extensive clutter and occlusion. The T-LESS dataset is designed to evaluate various variants of the 6D object pose estimation task, as well as other related problems such as 2D object detection and object segmentation.
提供机构:
捷克技术大学机器感知中心
创建时间:
2017-01-20
搜集汇总
数据集介绍
构建方式
T-LESS数据集的构建采用了同步的三传感器系统,包括一个结构光传感器、一个飞行时间RGB-D传感器和一个高分辨率RGB相机。通过系统性地从对象的视图球体中采样图像,捕获了大约39K训练图像和10K测试图像。每个对象都提供了两种3D模型,即手动创建的CAD模型和半自动重建的模型。数据集的特点在于包含无纹理的刚性物体,其中一些物体是其他物体的组成部分,并且在形状和/或大小上具有相似性。测试场景的复杂性各不相同,从具有几个孤立物体的简单场景到具有多个物体实例和高遮挡物和杂乱的非常具有挑战性的场景。
使用方法
T-LESS数据集的使用方法包括使用训练图像和3D模型进行6D物体位姿估计方法的评估。此外,还可以使用训练图像评估3D物体重建方法,其中提供的CAD模型可以用作地面真实值。数据集还包括由三种传感器捕获的图像,可以使用这些图像研究不同输入模态对于给定问题的重要性。用户可以使用提供的图像和模型来开发、测试和评估各种6D物体位姿估计方法,以及其他相关问题,如2D物体检测和物体分割。
背景与挑战
背景概述
T-LESS数据集是由布拉格查理大学机器感知中心和希腊技术基金会计算机科学研究所的研究人员于2017年创建的。该数据集旨在解决无纹理刚性物体的6D位姿估计问题,即估计物体的平移和旋转。T-LESS数据集包含了30个工业相关的物体,这些物体没有明显的纹理,也没有明显的颜色或反射率特性,且在形状和/或尺寸上具有对称性和相似性。数据集的独特之处在于,其中一些物体是其他物体的部分。数据集包括使用三个同步传感器捕获的训练和测试图像,即一个结构光和时间飞行RGB-D传感器以及一个高分辨率RGB相机。从每个传感器中,大约有39K个训练图像和10K个测试图像。此外,还为每个物体提供了两种类型的3D模型,即手动创建的CAD模型和半自动重建的模型。训练图像显示了单个物体在黑色背景下的情况。测试图像来自20个测试场景,这些场景的复杂性从包含几个孤立物体的简单场景到包含多个物体实例、大量杂乱和遮挡的极具挑战性的场景。图像是从围绕物体/场景的系统采样视球中捕获的,并带有所有建模物体的精确真实6D位姿注释。初步评估结果表明,在具有显著遮挡的困难情况下,6D物体位姿估计的现状仍有很大的改进空间。
当前挑战
T-LESS数据集的相关挑战包括:1) 所解决的领域问题是无纹理刚性物体的6D位姿估计,特别是在具有显著遮挡的情况下。2) 构建过程中遇到的挑战包括:a) 捕获大量无纹理物体的图像,并确保这些图像的准确性和多样性;b) 使用三个同步传感器捕获图像,并进行精确的相机校准和深度校正;c) 为每个物体创建两种类型的3D模型,并进行精确的对齐;d) 为训练和测试图像中的所有建模物体提供精确的真实6D位姿注释。
常用场景
经典使用场景
T-LESS数据集在6D姿态估计方面具有广泛的应用。该数据集包含无纹理刚性物体的训练和测试图像,为评估各种6D姿态估计方法的性能提供了标准。研究人员可以利用这些图像来训练和测试他们的算法,以准确估计无纹理物体的位置和方向。此外,T-LESS数据集还提供了两种类型的3D模型,即手动创建的CAD模型和半自动重建的模型,这有助于研究者更好地理解物体的形状和结构,从而提高姿态估计的准确性。
解决学术问题
T-LESS数据集解决了无纹理物体6D姿态估计这一重要学术研究问题。由于无纹理物体的视觉特征较少,传统的基于纹理的方法无法可靠地识别这些物体。T-LESS数据集通过提供大量的无纹理物体图像和准确的6D姿态标签,为研究人员提供了一个理想的平台来研究如何有效地识别和定位无纹理物体。此外,该数据集还包含了具有相似形状和大小的物体,以及部分物体是其他物体的组成部分,这使得研究人员可以更好地研究物体之间的相似性和差异性,从而提高姿态估计的鲁棒性。
实际应用
T-LESS数据集在实际应用中具有广泛的应用前景。例如,在机器人领域,6D姿态估计可以帮助机器人更好地理解周围环境,从而更准确地抓取和操作物体。在增强现实领域,6D姿态估计可以用于增强物体的感知,例如通过在物体上添加额外的信息来辅助组装。此外,T-LESS数据集还可以用于3D物体重建、物体检测和分割等领域。
数据集最近研究
最新研究方向
在6D位姿估计领域中,T-LESS数据集以其独特的无纹理刚性物体位姿估计挑战而备受关注。该数据集不仅包含了大量工业相关的无纹理物体,还提供了精确的6D位姿标注,为研究人员提供了一个评估和改进现有方法的重要平台。当前的研究方向主要集中在如何更好地处理无纹理物体在复杂场景中的位姿估计问题,尤其是在存在遮挡和杂乱的情况下。此外,研究人员也在探索如何有效地利用T-LESS数据集中的多模态数据(RGB-D图像)来提高位姿估计的准确性和鲁棒性。随着深度学习和三维重建技术的不断发展,T-LESS数据集有望推动6D位姿估计技术在工业自动化、增强现实和机器人技术等领域的进一步应用。
相关研究论文
- 1T-LESS: An RGB-D Dataset for 6D Pose Estimation of Texture-less Objects捷克技术大学机器感知中心 · 2017年
以上内容由遇见数据集搜集并总结生成


